目录
文章目录

[!NOTE]
是否可以很好的跟手。能否定点的很好。
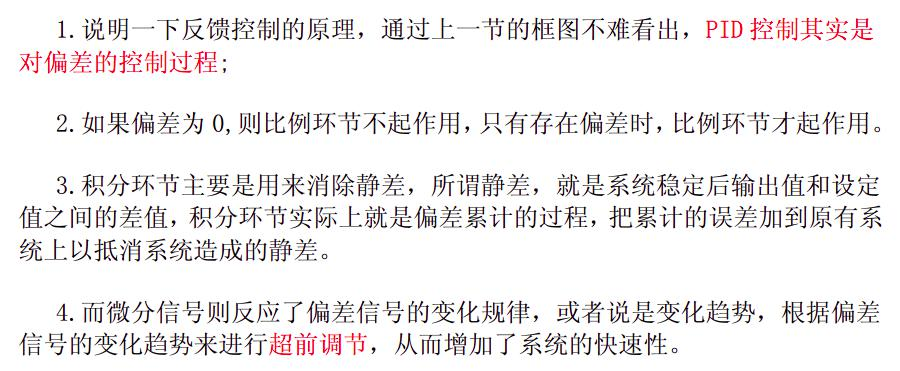
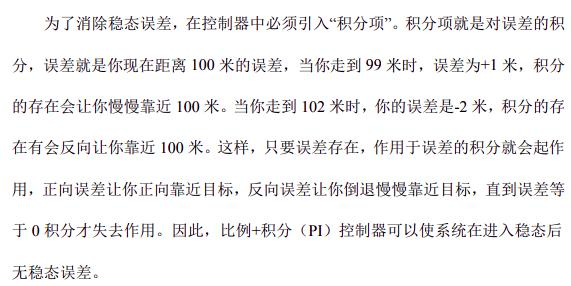
PID控制原理
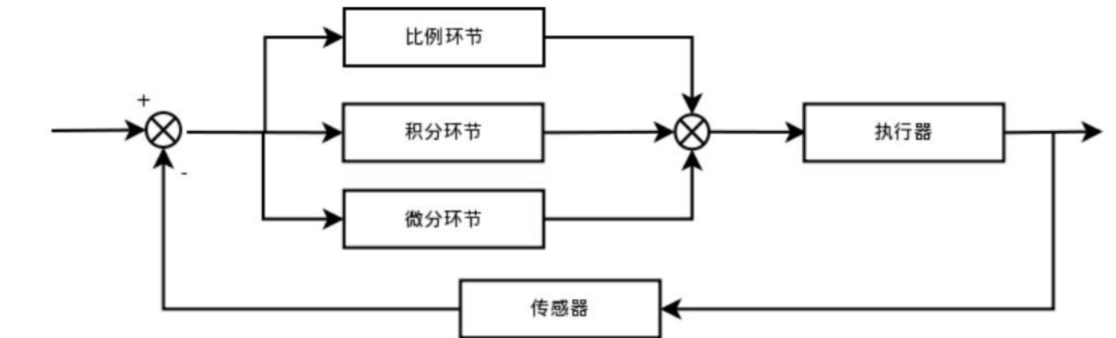
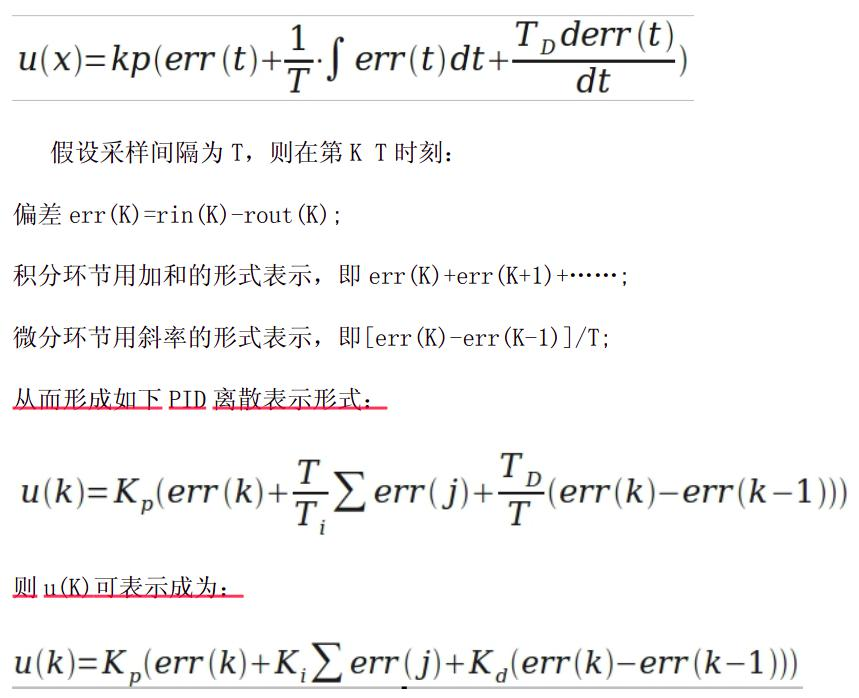
PID算法的基本形式

PID算法的连续系统离散化(位置式)
[!NOTE]
本质上与连续三次的误差有关系。
得到的是u(k)
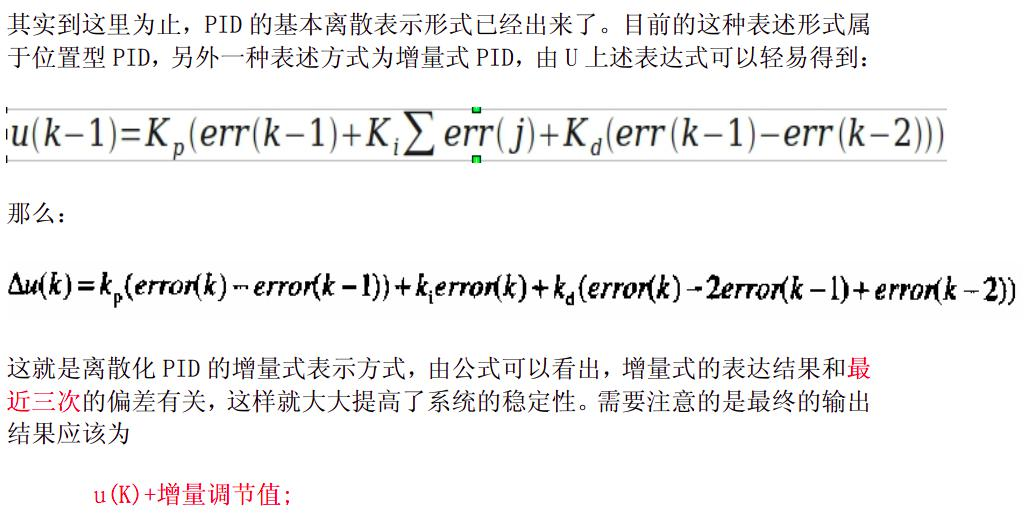
PID算法的连续系统离散化(增量式)
[!NOTE]
增量式是与最近三次的偏差有关
得到的是u(k)+▲u
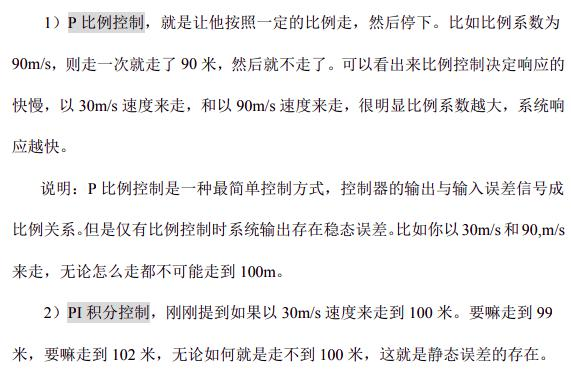
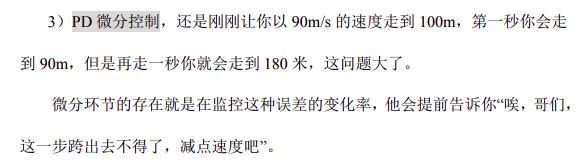
PID算法的实际应用的举例
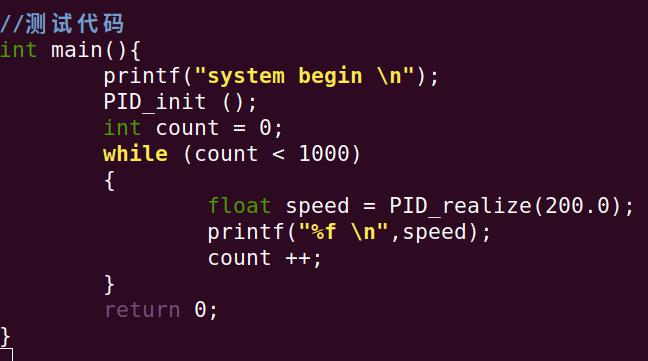
PID代码验证
PID算法的连续系统离散化(位置式)的程序实现
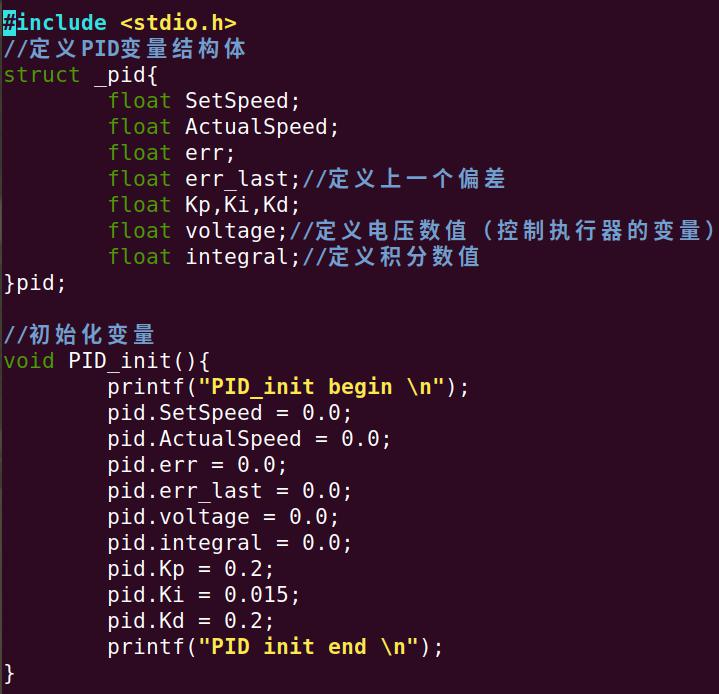
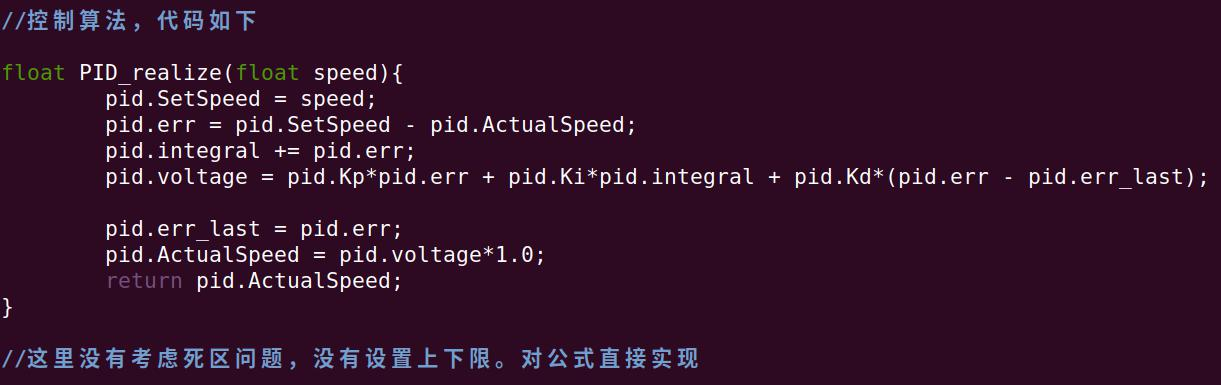
[!NOTE]
此处有一个很关键的点,你PID算出来的仅仅是控制量,而控制器的控制量输入,与实际输出的关系是没有的。也就是执行器的转变(有一个系数关系)
其他
https://zhuanlan.zhihu.com/p/74131690
![[足式机器人]Part2 Dr. CAN<span style='color:red;'>学习</span><span style='color:red;'>笔记</span>-自动<span style='color:red;'>控制</span><span style='color:red;'>原理</span>Ch1-9<span style='color:red;'>PID</span><span style='color:red;'>控制器</span>](https://img-blog.csdnimg.cn/direct/73af05c8c6a94c329e47bfa688ce9ffe.png#pic_center)

![[足式机器人]Part2 Dr. CAN<span style='color:red;'>学习</span><span style='color:red;'>笔记</span>-Ch<span style='color:red;'>01</span>自动<span style='color:red;'>控制</span><span style='color:red;'>原理</span>](https://img-blog.csdnimg.cn/direct/50d0a5dc59b94a218f2d0d609d19b720.png#pic_center)
















![[深度学习] 卷积神经网络“卷“在哪里?](https://img-blog.csdnimg.cn/direct/c795844a43de450fb266fccf030b6414.jpeg)