概要
利用TCP技术,实现本地ROS1和ROS2的通讯。
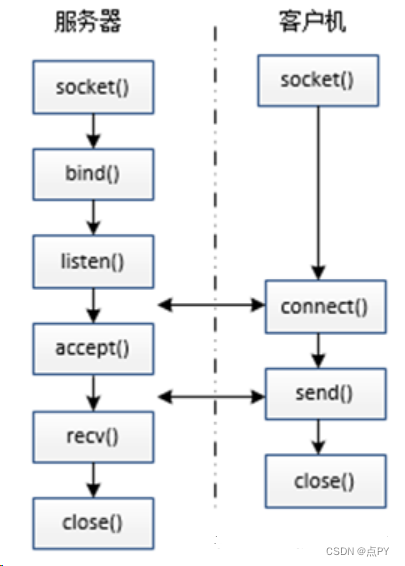
服务端代码
头文件
#include <ros/ros.h>
#include "std_msgs/String.h"
#include "std_msgs/Bool.h"
#include <iostream>
#include <cstring>
#include <unistd.h>
#include <arpa/inet.h>
#include <sys/socket.h>
#include "geometry_msgs/Twist.h"
using namespace std;
class TCPPublisher
{
public:
TCPPublisher();
~TCPPublisher();
void cmdVelCallback(const geometry_msgs::Twist::ConstPtr& msg);
private:
ros::NodeHandle n, nPrivate;
ros::Publisher tcpPub;
ros::Subscriber cmdVelSub;
// 创建服务器套接字
int serverSocket;
// 设置服务器地址结构
sockaddr_in serverAddr;
int clientSocket;
std::string topicStatus;
};
源代码
#include "./tcp_pub/tcp_pub.h"
TCPPublisher::TCPPublisher():nPrivate("~")
{
nPrivate.param("topicStatus", topicStatus, std::string("/cmd_vel"));
/*订阅话题*/
cmdVelSub = n.subscribe(topicStatus.c_str(), 10, &TCPPublisher::cmdVelCallback, this);
serverSocket = socket(AF_INET, SOCK_STREAM, 0);
// 设置服务器地址结构
sockaddr_in serverAddr;
serverAddr.sin_family = AF_INET;
serverAddr.sin_addr.s_addr = INADDR_ANY;
serverAddr.sin_port = htons(8080); // 服务器监听的端口号
// 绑定套接字
if (bind(serverSocket, (struct sockaddr*)&serverAddr, sizeof(serverAddr)) == -1) {
std::cerr << "Bind failed." << std::endl;
close(serverSocket);
return;
}
// 监听连接
if (listen(serverSocket, SOMAXCONN) == -1) {
std::cerr << "Listen failed." << std::endl;
close(serverSocket);
return;
}
std::cout << "Server is listening for incoming connections..." << std::endl;
ROS_INFO("TCPPublisher init successfully!!!");
}
TCPPublisher::~TCPPublisher()
{
close(serverSocket);
}
void TCPPublisher::cmdVelCallback(const geometry_msgs::Twist::ConstPtr& msg)
{
float velX = msg->linear.x;
float angularZ = msg->angular.z;
// ROS_INFO("velX : %f, angularZ : %f", velX, angularZ);
// 定义字符数组,用于存储转换后的结果
char buffer[50]; // 适当调整数组大小以适应你的需求
snprintf(buffer, sizeof(buffer), "%f,%f", velX, angularZ);
// ROS_INFO("buffer %s", buffer);
// 接受连接
int clientSocket = accept(serverSocket, NULL, NULL);
if (clientSocket == -1) {
std::cerr << "Accept failed." << std::endl;
close(serverSocket);
return;
}
std::cout << "Connection established with a client." << std::endl;
// 发送消息给客户端
const char* message = buffer;
ROS_INFO("message %s", message);
if (send(clientSocket, message, strlen(message), 0) == -1) {
std::cerr << "Error sending message." << std::endl;
}
// 关闭客户端套接字
close(clientSocket);
}
int main(int argc, char **argv) {
//创建节点
ros::init(argc, argv, "pure_pursuit");
TCPPublisher tp;
ros::spin();
return 0;
}
客户端代码
#include <rclcpp/rclcpp.hpp>
#include <geometry_msgs/msg/twist.hpp>
#include <iostream>
#include <cstring>
#include <unistd.h>
#include <arpa/inet.h>
#include <sys/socket.h>
int main(int argc, char * argv[]) {
rclcpp::init(argc, argv);
auto node = std::make_shared<rclcpp::Node>("tcp_client");
/*define publisher*/
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr cmd_pub_;
// Advertise velocity commands
auto default_qos = rclcpp::QoS(rclcpp::SystemDefaultsQoS());
cmd_pub_ = node->create_publisher<geometry_msgs::msg::Twist>("cmd_vel", default_qos);
//连接到服务器
// if (connect(clientSocket, (struct sockaddr*)&serverAddr, sizeof(serverAddr)) == -1) {
// std::cerr << "Connection failed." << std::endl;
// close(clientSocket);
// return 1;
// }
// std::cout << "Connected to the server." << std::endl;
while (true) {
// 创建客户端套接字
int clientSocket = socket(AF_INET, SOCK_STREAM, 0);
if (clientSocket == -1) {
std::cerr << "Failed to create client socket." << std::endl;
return 1;
}
// 设置服务器地址结构
sockaddr_in serverAddr;
serverAddr.sin_family = AF_INET;
serverAddr.sin_addr.s_addr = htonl(INADDR_LOOPBACK); // 本地回环地址 // 服务器的 IP 地址
serverAddr.sin_port = htons(8080); // 服务器监听的端口号
// 连接到服务器
if (connect(clientSocket, (struct sockaddr*)&serverAddr, sizeof(serverAddr)) == -1) {
std::cerr << "Connection failed." << std::endl;
close(clientSocket);
// return 1;
}
// std::cout << "Connected to the server." << std::endl;
// 接收消息
char buffer[50];
memset(buffer, 0, sizeof(buffer));
if (recv(clientSocket, buffer, sizeof(buffer), 0) == -1) {
std::cerr << "Error receiving message." << std::endl;
} else {
std::cout << "Received message from server: " << buffer << std::endl;
// 定义两个变量来存储解析后的浮点数
float floatValue1, floatValue2;
// 使用 sscanf 解析字符数组
if (std::sscanf(buffer, "%f,%f", &floatValue1, &floatValue2) == 2) {
// 打印解析结果
std::cout << "解析后的浮点数1: " << floatValue1 << std::endl;
std::cout << "解析后的浮点数2: " << floatValue2 << std::endl;
} else {
// 解析失败
std::cerr << "解析失败" << std::endl;
}
geometry_msgs::msg::Twist cmd_msg;
cmd_msg.linear.x = floatValue1;
cmd_msg.angular.z = floatValue2;
cmd_pub_->publish(cmd_msg);
std::cout << "Publishing zero speed to /cmd_vel. " << std::endl;
}
// 关闭客户端套接字
close(clientSocket);
// 在这里可以添加一些延时,以避免过于频繁地连接服务器
sleep(0.1);
}
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}