一、PWM 概述
PWM(Pulse Width Modulation)又叫脉冲宽度调制,它是通过对一系列脉冲的宽度进行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过调节占空比的变化来调节信号、能量等的变化。占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比,例如方波的占空比就是 50%。
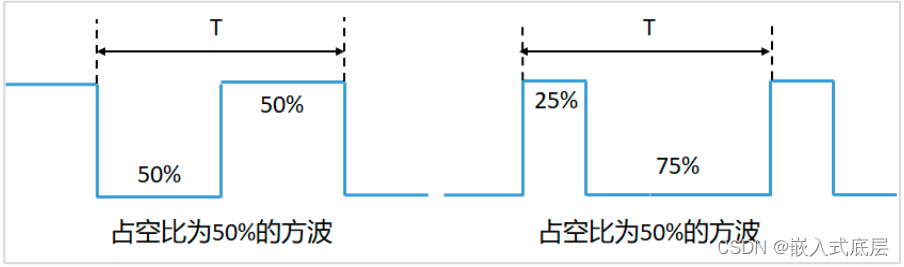
计算公式如下:
占空比 = 高电平时间 周期时间 ∗ 100 % 占空比 = \frac{高电平时间}{周期时间} * 100\% 占空比=周期时间高电平时间∗100%
PWM 操作流程如下:

二、PWM 模块相关API
头文件路径:base/iothardware/peripheral/interfaces/inner_api/iot_pwm.h
| 接口函数 | 描述 |
|---|---|
| unsigned int IoTPwmInit(unsigned int port) | PWM初始化 |
| unsigned int IoTPwmDeinit(unsigned int port) | PWM去初始化 |
| unsigned int IoTPwmStart(unsigned int port, unsigned short duty, unsigned int freq) | 按配置的参数输出PWM信号 |
| unsigned int IoTPwmStop(unsigned int port) | 停止PWM信号输出 |
三、接口调用实例
//代码功能:定义了 GPIO_00 号口为 PWM3_OUT 模式且输出比例为 50%的占空比,最后停止。
#include "iot_pwm.h"
IoTPwmInit(PWM3_OUT);
IoTPwmStart(PWM3_OUT,50,100);
IoTPwmStop(PWM3_OUT);
四、PWM HDF驱动开发
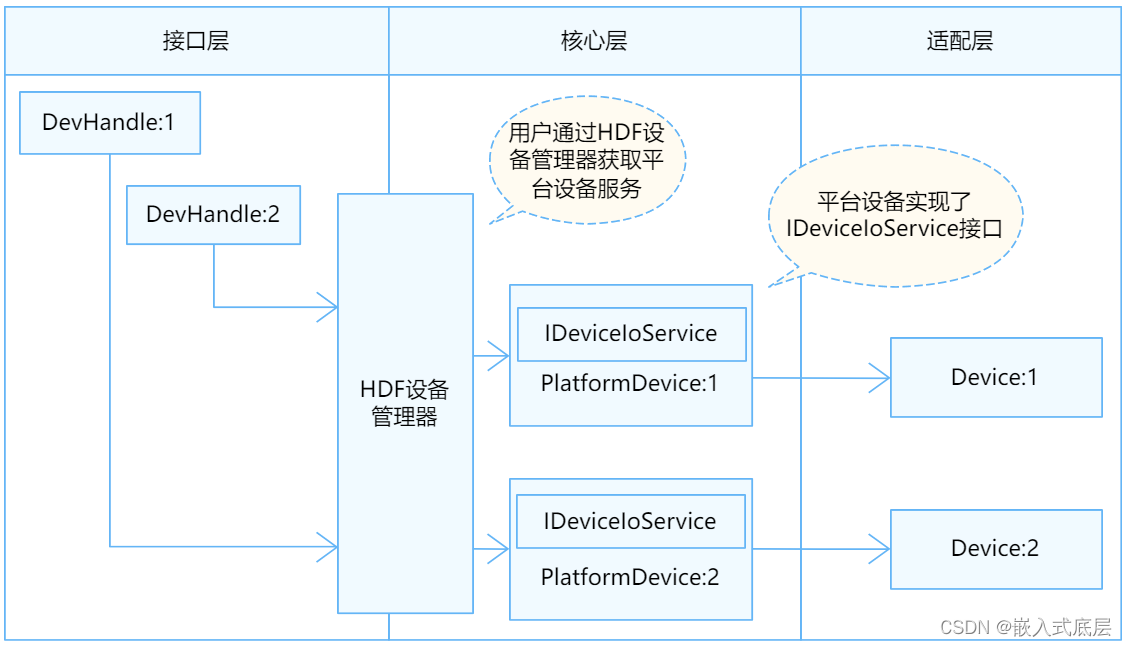
在HDF框架中,PWM接口适配模式采用独立服务模式(如图1所示)。在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDF设备管理器的服务管理能力,但需要为每个设备单独配置设备节点,增加内存占用。
独立服务模式下,核心层不会统一发布一个服务供上层使用,因此这种模式下驱动要为每个控制器发布一个服务,具体表现为:
驱动适配者需要实现HdfDriverEntry的Bind钩子函数以绑定服务。
device_info.hcs文件中deviceNode的policy字段为1或2,不能为0。
PWM模块各分层作用:
接口层提供打开PWM设备、设置PWM设备周期、设置PWM设备占空时间、设置PWM设备极性、设置PWM设备参数、获取PWM设备参数、使能PWM设备、禁止PWM设备、关闭PWM设备的接口。
核心层主要提供PWM控制器的添加、移除以及管理的能力,通过钩子函数与适配层交互。
适配层主要是将钩子函数的功能实例化,实现具体的功能。
图 1 PWM独立服务模式结构图
4.1、开发步骤(待续…)
PWM模块适配包含以下四个部分。
- 驱实例化驱动入口
- 配置属性文件
- 实例化PWM控制器对象
- 驱动调试
坚持就有收获

























![[Flink04] Flink部署实践](https://img-blog.csdnimg.cn/direct/a872a60512d84b398452ec3704d89036.png)