由于Chrono的官方教程在一些细节方面解释的并不清楚,自己做了一些尝试,做学习总结。
1、Sensor数据生成流程回顾
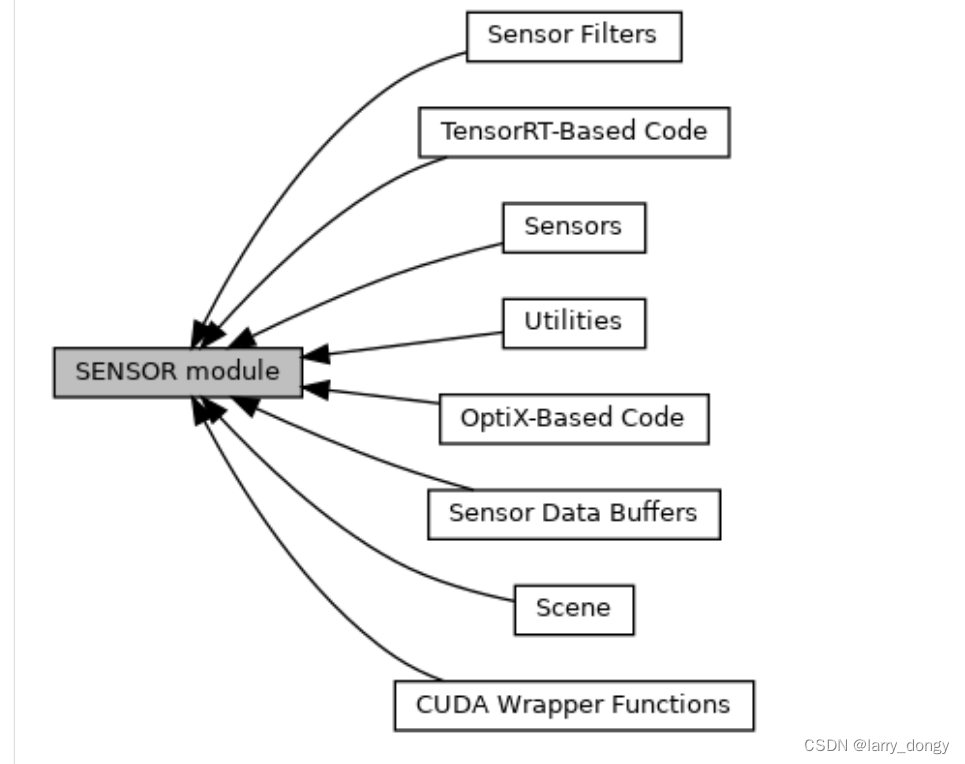
Chrono里面,sensor的数据生成、可视化、以及保存,都需要单独进行设置才能实现。sensor数据的采集流程如下https://api.projectchrono.org/sensor_overview.html:
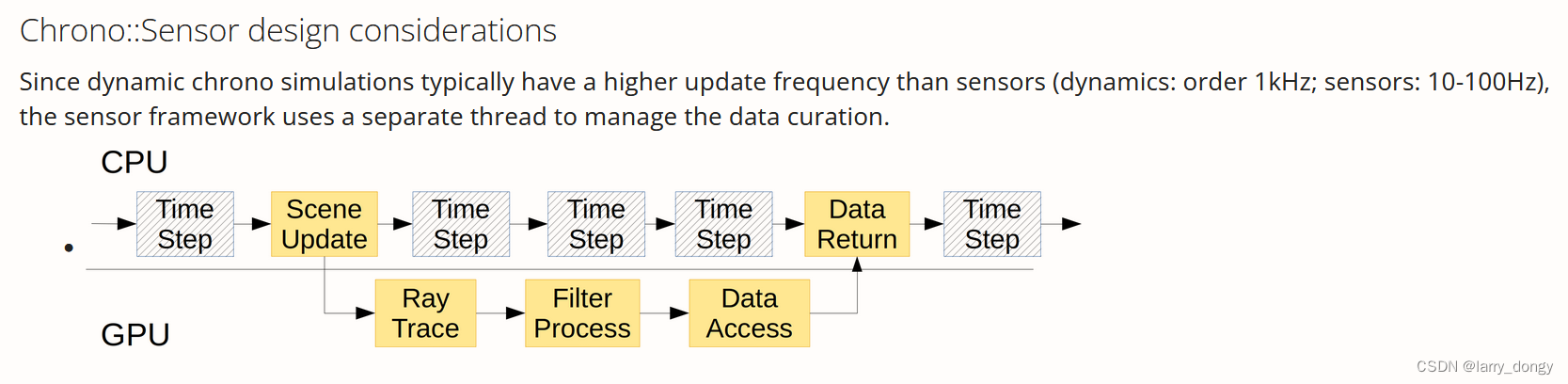
可以看出,sensor数据更新是另一个线程中进行,当场景/物体发生变化后,获得sensor的原始数据,之后应用各种滤波器,最后将滤波后的数据输出,可以在主线程中进行调用/保存。这就是sensor数据采集的整体流程。
2、数据输出的两种方式
2.1 通过滤波器实现
在官方的demo_SEN_gator和demo_SEN_HMMWV中,给出了通过滤波器方式实现数据输出的例子。关键核心步骤如下:
// 1. 创建一个sensor的manager
auto manager = chrono_types::make_shared<ChSensorManager>(gator.GetSystem());
// 2. 创建一个sensor
auto vlp16 = chrono::sensor::Sensor::CreateFromJSON(GetChronoDataFile("sensor/json/Velodyne/HDL-32E.json"), gator.GetChassisBody(), lidar_extrinsics);
// 3. 添加“保存点云”滤波器。只有加上这一行,才能够在后续仿真中自动输出
vlp16->PushFilter(chrono_types::make_shared<ChFilterSavePtCloud>("C:/Users/larrydong/Desktop/lidar_output/")); // 包含这个filter,在每次Apply对应的filter时(update中),会执行保存到文件,并输出Beam count
// 4. 添加sensor到管理器
manager->AddSensor(vlp16);
// 循环部分
manager->Update();
gator.Synchronize(time, driver_inputs, terrain);
gator.Advance(step_size);
程序运行之后,将会在滤波器给出的输出路径,输出第N帧数据的csv文件,文件内为点云数据。
2.2 通过直接读取Buffer实现
官方的tutorial中给出了一个读取数据的方式https://api.projectchrono.org/lidar_sensor.html:
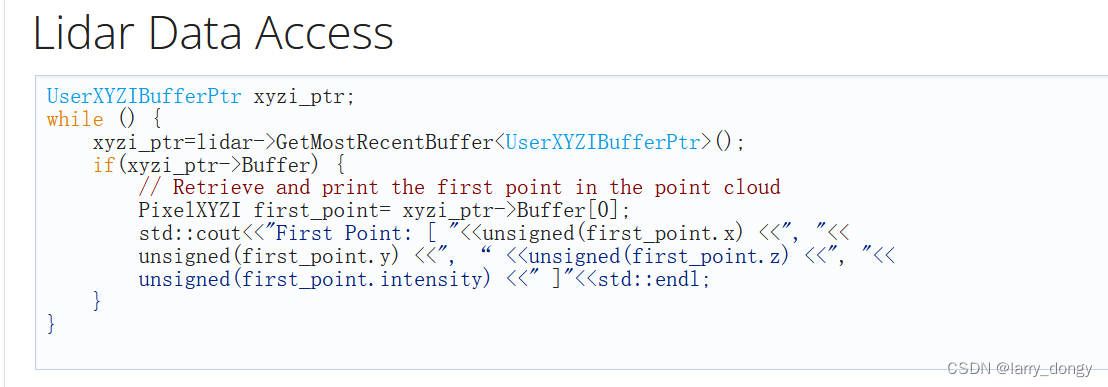
但并没有详细解释。进行了探究,发现,只需要在主循环中,判断读到了Buffer之后,即可输出数据,从这里写入文件即可。但这里存在一个问题,Buffer的大小是多少,即有多少个lidar点?这个问题在下一小节进行探讨。
3、详细探究lidar数据更新过程
3.1 关于Buffer读取的探究
在2.2中,给出了通过直接读取lidar的Buffer的方式读取数据。我们查看GetMostRecentBuffer函数,调用了ChSensor中的GetMostRecentBufferHelper,进一步调用了ChFilterAccess中的GetBuffer()。从这个最终的函数中,可以看出获取了buffer的宽、高、时间戳、和更新次数(LaunchedCount),因此在2.2中获取Buffer之后,可以通过数据的宽和高(对于lidar来说是Nx1的),获取lidar数据。
例如,20Hz的lidar,我们在main循环中,每步都输出Buffer的基本信息。代码:
 输出如下:
输出如下:
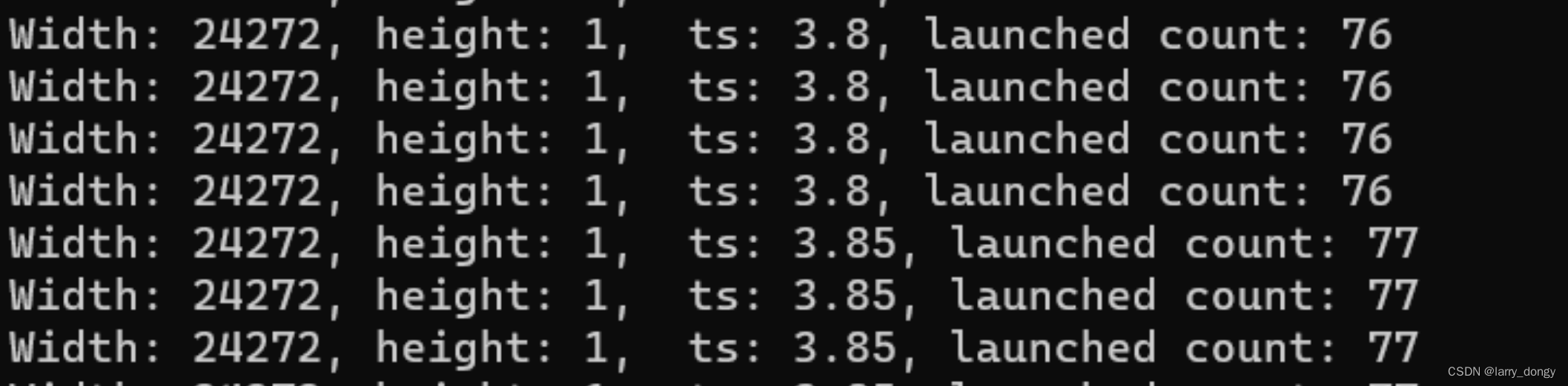 即当前点云有24272个点,对应时间是3.8s和3.85s,对应第76和77帧。但我们发现,Buffer虽然没有更新,但依然是存在的,因此不能单纯通过Buffer是否存在,判断有无更新,而是需要通过launchCount这个数进行判断。但这时,我们仍不清楚lidar的数据在什么时刻“输出”的。我们马上会说到这个问题。
即当前点云有24272个点,对应时间是3.8s和3.85s,对应第76和77帧。但我们发现,Buffer虽然没有更新,但依然是存在的,因此不能单纯通过Buffer是否存在,判断有无更新,而是需要通过launchCount这个数进行判断。但这时,我们仍不清楚lidar的数据在什么时刻“输出”的。我们马上会说到这个问题。
3.2 采用Filter方式输出
例子当中,我们把lidar这个sensor绑定到一个车辆vehicle当中。这部分其实很容易实现,只需要在创建一个sensor时指定attach的实体,给上我们的vehicle即可。这里的vehicle用的是Gator。
auto vlp16 = chrono::sensor::Sensor::CreateFromJSON(
GetChronoDataFile("sensor/json/Velodyne/HDL-32E.json"),
gator.GetChassisBody(), // 绑定到Gator的底盘上,Gator的底盘本质上还是一个ChBody
lidar_extrinsics); // 相对于底盘的位置参数,即lidar外参
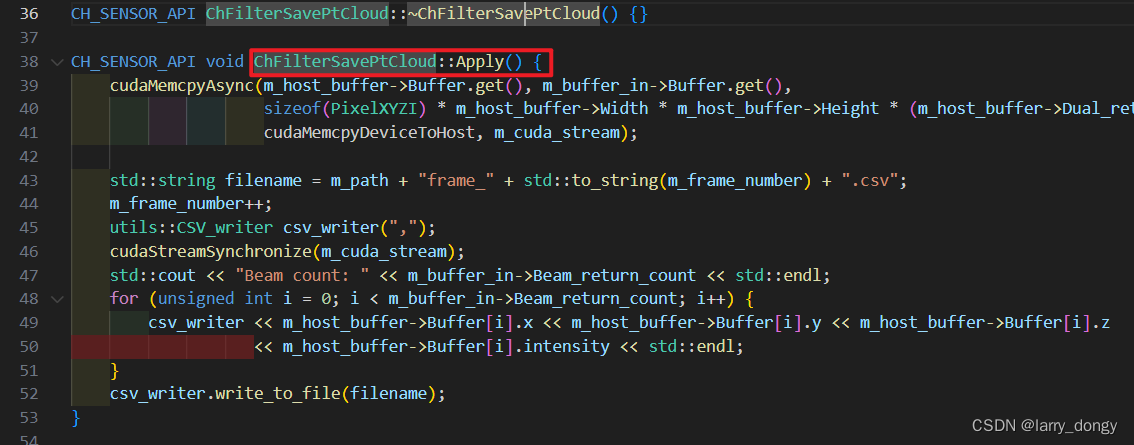
在main当中,我们有三个关键函数:sensor manager的update(),gator的Synchronize,以及gator的Advance()。经测试标明,在lidar输出了数据之后,Advance()执行时,会输出lidar数据到指定路径。具体的实现是调用了ChFilterSavePtCloud的Apply函数实现的,如下:
3.3 函数详解
需要提醒的是,调用GetMostRecentBuffer和Filter两种方式输出并不冲突。前者是我们自己读取Buffer获取,后者是仿真里面“例行公事”完成的,例行公事的函数就是这个Advance。只不过,我并不是很清楚,什么时候lidar的Buffer中更新了数据、什么时候执行的Advance。
提醒的第2点,sensor绑定vehicle后,更新的部分之和vehicle的函数有关,哪怕是sensor的可视化,也与irrlicht等可视化模块无关。只有当sensor的filter添加了可视化的filter之后,才能显示sensor的数据,并且窗口中数据的更新是跟vehicle的,并不是跟vis模块的。
在“认可”上面两条之后,我们探讨这部分的几个函数。
manager->Update()
 我们看sensor manager的Update,可以看到,包括:对所有光学传感器更新、非光学传感器更新两部分。前者依赖OptiX库,底层实现在 ChOptixEngine.cpp 中。对于光学的
我们看sensor manager的Update,可以看到,包括:对所有光学传感器更新、非光学传感器更新两部分。前者依赖OptiX库,底层实现在 ChOptixEngine.cpp 中。对于光学的UpdateSensors,具体如下:
 在这个Update完成之后,可以认为lidar已经“采集了”一个新的数据,但这个数据并没有“传输”出来。此时,在执行
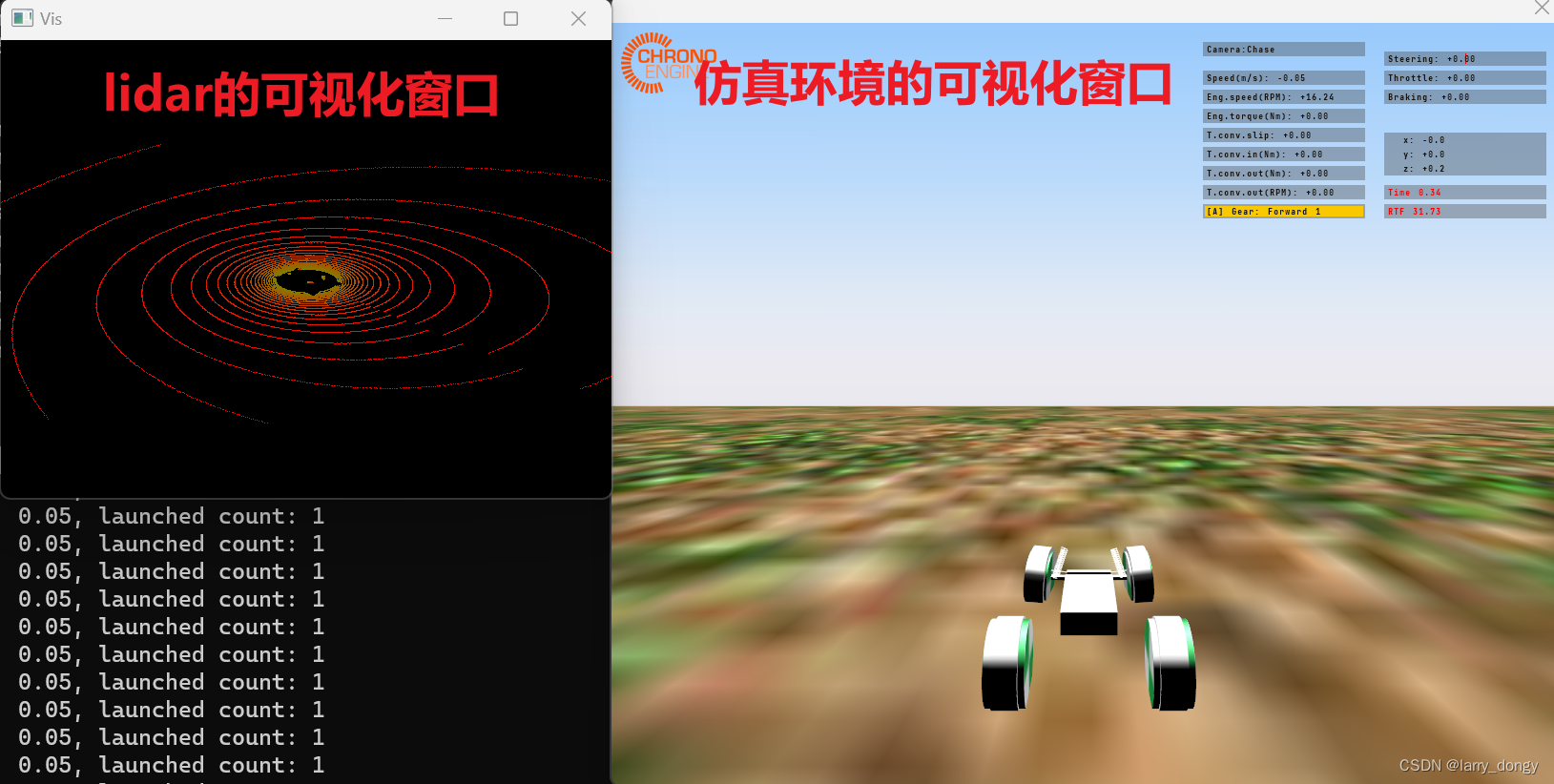
在这个Update完成之后,可以认为lidar已经“采集了”一个新的数据,但这个数据并没有“传输”出来。此时,在执行Adance()函数时,会更新可视化窗口。即下图左侧的这个窗口,是由Sensor管理的,在sensor更新时才会更新,更新的频率和右侧的仿真窗口不同,右侧的是可视化例如irrlicht控制的。
gator.Advance()
这个Advance函数很复杂, 包括了vehicle和各种子系统的更新。由于Gator是一个wheelvehicle,也是一个vehicle,所以Gator的advance在完成了Gator一些独特的操作之后,再次调用ChWheelVehicle的advance,完成wheel特有的操作之后,再调用了ChVehicle的advance。同时,vehicle包括一个物理系统(之前博客讲过,如果有vehicle之后,就不需要再定义仿真物理系统了),最终执行的是物理系统的DoStepDynamic
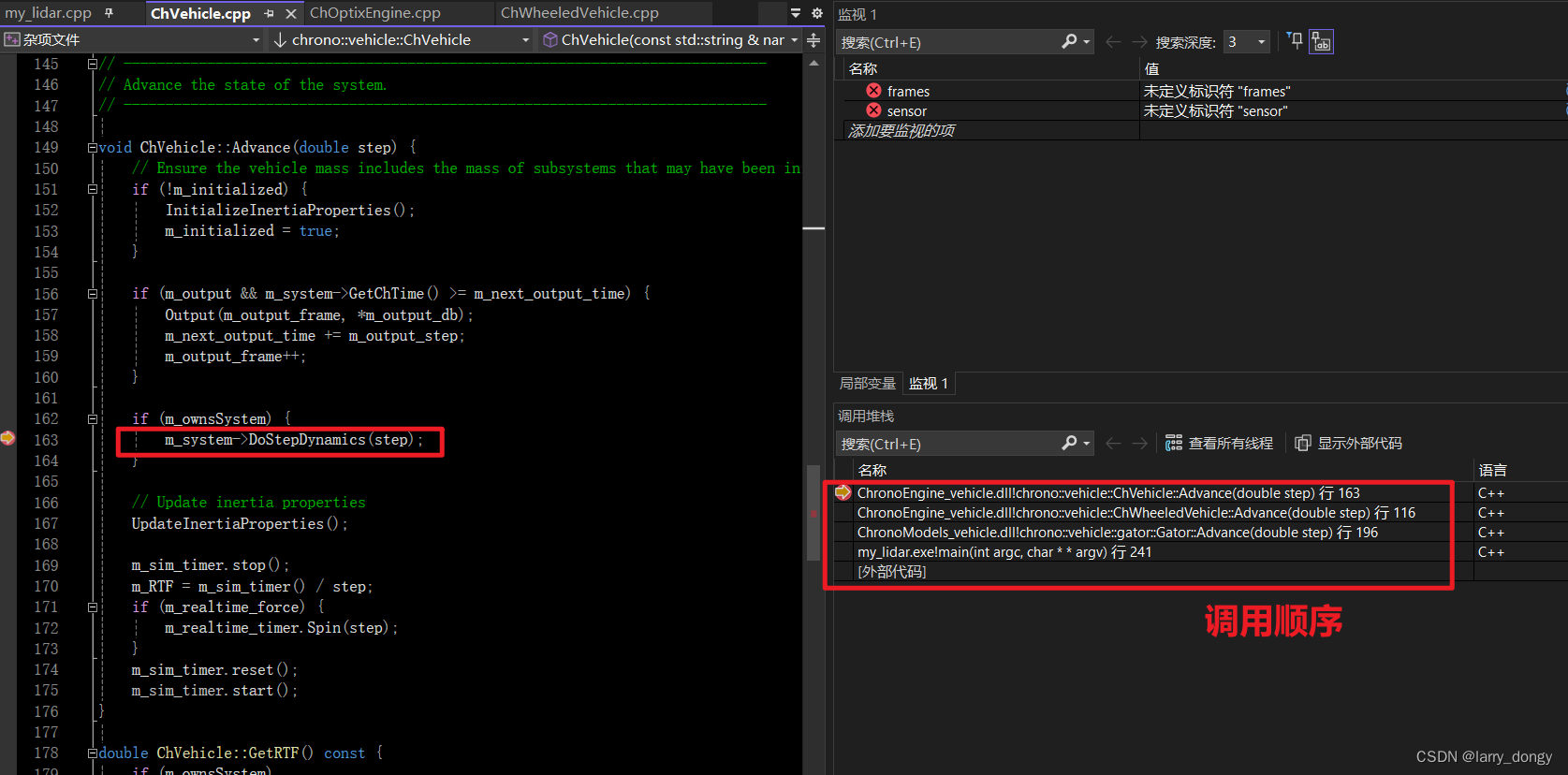 到这一步往下就没有深究。但正如上面所说,具体advance时,执行了更新图像、保存数据等操作。
到这一步往下就没有深究。但正如上面所说,具体advance时,执行了更新图像、保存数据等操作。
何时更新图形、何时保存数据?
我们来看最后一个问题,到底是什么时候保存的数据、什么时候更新的lidar显示?由于上面已经说明了,lidar的显示和输出,并不是同步的。
为了充分模拟传感器,chrono在场景变化后,lidar的采集数据是立刻变化的,可视化的窗口会进行更新,但此时的数据并没有输出出来。这个输出延时,就是对传感器设置时有一个lag参数,表示“从采集到数据,到数据输出”的时间延迟。
可以这么理解,仿真过程是这个样子:
- 当达到物理仿真频率时(很高,例如1ms),物理环境就发生变换:
- 当达到sensor的采集频率时(不高,例如20Hz的lidar是50ms), lidar传感器获得了一次完整的frame,这一步由manager->Update实现;但在这个过程中,采集过程是另一个线程实现的,因此数据是连续的,并不是单纯的在“这一个时刻”获得的;
- 在sensor有效的update之后,
Advance时对可视化窗口进行了更新(但“传输”的数据还没有更新) - 经过当sensor的lag之后,如果定义了获取数据的Filter(ChFilterXYZIAccess),此时输出数据获得了更新,即
GetMostRecentBuffer获取到的数据进行了更新;如果又定义了保存点云的Filter(ChFilterSavePtCloud),此时Advance时会输出csv文件到路径。
通过对一个完整的过程打断点与输出,验证了上面的理解:
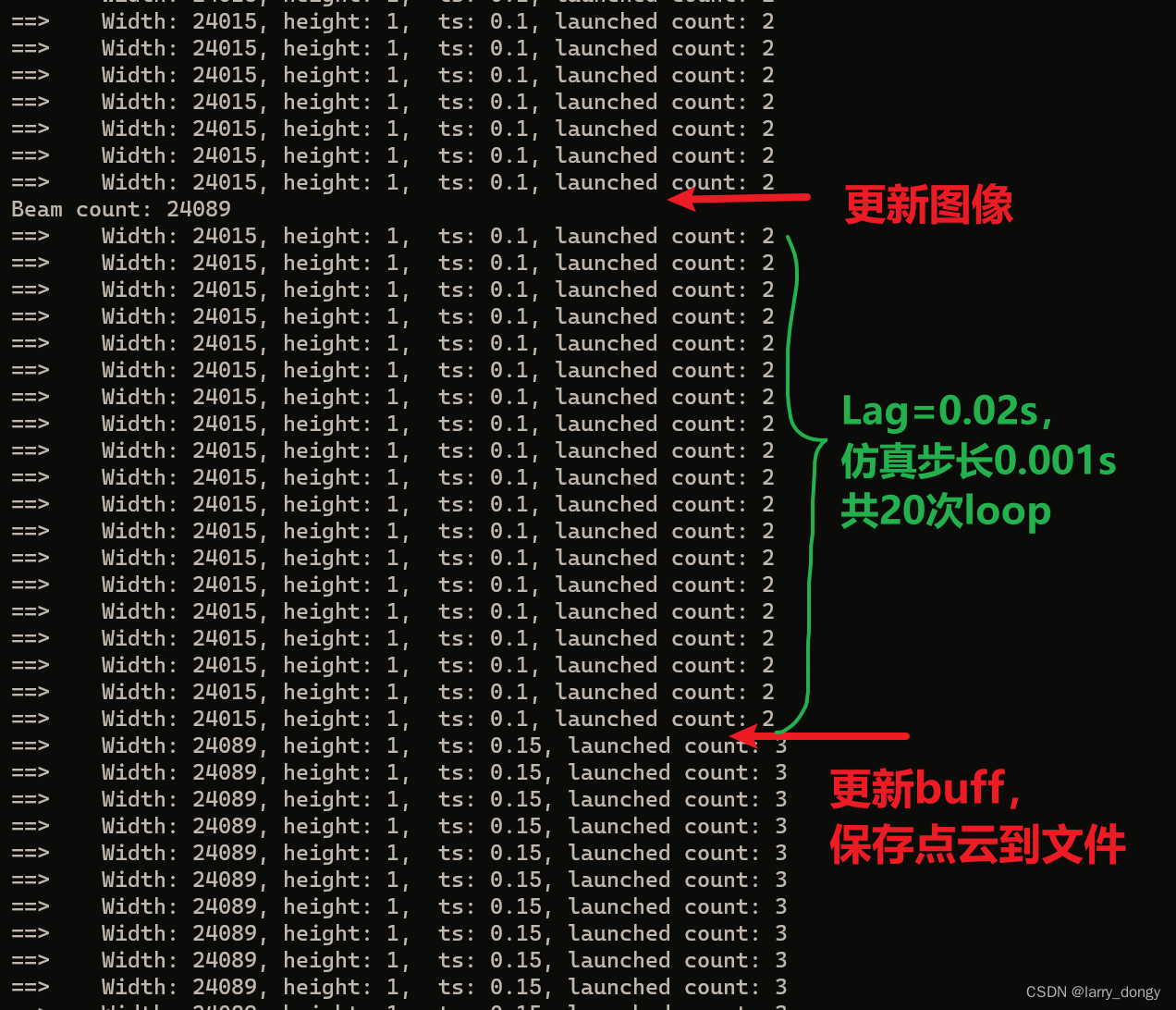
- “Width xxx” 这一行输出,是仿真每次循环(每1ms)时输出一次;
- “Beam count” 这一行输出是
Advance中更新图像窗口时的输出,精准的每50次执行一次; - 在0.1s和0.15s之间,可以看出点云的数据Buffer发生了变化,也就是这个时刻,lidar已经update的数据“传输”了、
GetMostRecentBuffer发生了更新,因此此时Advance时能够保存点云到路径; - 在每次Update之后,经过了20次loop,更新的buff和输出点云,这个20次就是sensor的lag参数控制的。我设置成了0.02s,因此经过1ms的循环20次,“传输”了。
4、完整代码
这个代码太长了,主要是用来测试上面的内容。
#include "chrono/core/ChRealtimeStep.h"
#include "chrono/utils/ChUtilsInputOutput.h"
#include "chrono/physics/ChBodyEasy.h"
#include "chrono_vehicle/ChVehicleModelData.h"
#include "chrono_vehicle/terrain/RigidTerrain.h"
#include "chrono_vehicle/driver/ChInteractiveDriverIRR.h"
#include "chrono_vehicle/wheeled_vehicle/ChWheeledVehicleVisualSystemIrrlicht.h"
#include "chrono_models/vehicle/gator/Gator.h"
#include "chrono_thirdparty/filesystem/path.h"
#include "chrono_sensor/sensors/Sensor.h"
#include "chrono_sensor/sensors/ChCameraSensor.h"
#include "chrono_sensor/sensors/ChLidarSensor.h"
#include "chrono_sensor/ChSensorManager.h"
#include "chrono_sensor/filters/ChFilterAccess.h"
#include "chrono_sensor/filters/ChFilterPCfromDepth.h"
#include "chrono_sensor/filters/ChFilterVisualize.h"
#include "chrono_sensor/filters/ChFilterSave.h"
#include "chrono_sensor/filters/ChFilterSavePtCloud.h"
#include "chrono_sensor/filters/ChFilterVisualizePointCloud.h"
#include "chrono_sensor/filters/ChFilterAccess.h"
#include "chrono_sensor/filters/ChFilterVisualize.h"
#include "chrono_sensor/sensors//ChSensorBuffer.h"
#include <iostream>
using namespace chrono;
using namespace chrono::irrlicht;
using namespace chrono::vehicle;
using namespace chrono::vehicle::gator;
using namespace chrono::sensor;
// =============================================================================
// Initial vehicle location and orientation
ChVector<> initLoc(0, 0, 0.5);
ChQuaternion<> initRot(1, 0, 0, 0);
// Visualization type for vehicle parts (PRIMITIVES, MESH, or NONE)
VisualizationType chassis_vis_type = VisualizationType::PRIMITIVES;
VisualizationType suspension_vis_type = VisualizationType::PRIMITIVES;
VisualizationType steering_vis_type = VisualizationType::PRIMITIVES;
VisualizationType wheel_vis_type = VisualizationType::PRIMITIVES;
VisualizationType tire_vis_type = VisualizationType::PRIMITIVES;
// Collision type for chassis (PRIMITIVES, HULLS, or NONE)
CollisionType chassis_collision_type = CollisionType::NONE;
// Type of tire model (RIGID, TMEASY)
TireModelType tire_model = TireModelType::TMEASY;
// Rigid terrain
RigidTerrain::PatchType terrain_model = RigidTerrain::PatchType::BOX;
// Contact method
ChContactMethod contact_method = ChContactMethod::NSC;
// Simulation step sizes
double step_size = 1e-3;
double tire_step_size = step_size;
// Time interval between two render frames
double render_step_size = 1.0 / 50; // FPS = 50
// SENSOR PARAMETERS
// Save sensor data
bool sensor_save = false;
// Visualize sensor data
bool sensor_vis = true;
// =============================================================================
int main(int argc, char* argv[]) {
GetLog() << "Copyright (c) 2017 projectchrono.org\nChrono version: " << CHRONO_VERSION << "\n\n";
chrono::SetChronoDataPath("E:/codeGit/chrono/chrono/build/data/"); // change the default data loading path.
chrono::vehicle::SetDataPath("E:/codeGit/chrono/chrono/build/data/vehicle/"); // change the vehicle data path
// --------------
// Create vehicle
// --------------
Gator gator;
gator.SetContactMethod(contact_method);
gator.SetChassisCollisionType(chassis_collision_type);
gator.SetChassisFixed(false);
gator.SetInitPosition(ChCoordsys<>(initLoc, initRot));
gator.SetTireType(tire_model);
gator.SetTireStepSize(tire_step_size);
gator.SetAerodynamicDrag(0.5, 5.0, 1.2);
gator.Initialize();
gator.SetChassisVisualizationType(chassis_vis_type);
gator.SetSuspensionVisualizationType(suspension_vis_type);
gator.SetSteeringVisualizationType(steering_vis_type);
gator.SetWheelVisualizationType(wheel_vis_type);
gator.SetTireVisualizationType(tire_vis_type);
// Associate a collision system
gator.GetSystem()->SetCollisionSystemType(ChCollisionSystem::Type::BULLET);
// ------------------
// Create the terrain
// ------------------
RigidTerrain terrain(gator.GetSystem());
ChContactMaterialData minfo;
minfo.mu = 0.9f;
minfo.cr = 0.01f;
minfo.Y = 2e7f;
auto patch_mat = minfo.CreateMaterial(contact_method);
std::shared_ptr<RigidTerrain::Patch> patch;
patch = terrain.AddPatch(patch_mat, CSYSNORM, 100.0, 100.0);
patch->SetTexture(vehicle::GetDataFile("terrain/textures/tile4.jpg"), 200, 200);
patch->SetColor(ChColor(0.8f, 0.8f, 0.5f));
terrain.Initialize();
auto ground_body = patch->GetGroundBody(); // ground_body: ChBody 是地形的ChBody
auto vis_mat1 = chrono_types::make_shared<ChVisualMaterial>();
vis_mat1->SetKdTexture(vehicle::GetDataFile("terrain/textures/grass.jpg")); // Kd, Ks, Ke:一些材质的反射、发光等设定。
vis_mat1->SetWeightTexture(GetChronoDataFile("sensor/textures/weight1.png")); // 两种地形材料的混合权重。weight1和2是互补的。
vis_mat1->SetSpecularColor({
.0f, .0f, .0f });
vis_mat1->SetRoughness(1.f);
vis_mat1->SetUseSpecularWorkflow(false);
auto vis_mat2 = chrono_types::make_shared<ChVisualMaterial>();
vis_mat2->SetKdTexture(vehicle::GetDataFile("terrain/textures/dirt.jpg"));
vis_mat2->SetWeightTexture(GetChronoDataFile("sensor/textures/weight2.png"));
vis_mat2->SetSpecularColor({
.0f, .0f, .0f });
vis_mat2->SetRoughness(1.f);
vis_mat2->SetUseSpecularWorkflow(false);
auto visual_shape = ground_body->GetVisualModel()->GetShape(0);
visual_shape->SetMaterial(0, vis_mat1); // 将第i个material设置为某个特定的material
visual_shape->AddMaterial(vis_mat2);
// -------------------------------------
// Create the vehicle Irrlicht interface
// -------------------------------------
auto vis = chrono_types::make_shared<ChWheeledVehicleVisualSystemIrrlicht>();
vis->SetWindowTitle("Gator Demo");
vis->SetChaseCamera(ChVector<>(0.0, 0.0, 2.0), 5.0, 0);
vis->Initialize();
vis->AddTypicalLights();
vis->AddSkyBox();
vis->AddLogo();
vis->AttachVehicle(&gator.GetVehicle());
// ------------------------
// Create the driver system
// ------------------------
// Create the interactive driver system
ChInteractiveDriverIRR driver(*vis);
// Set the time response for steering and throttle keyboard inputs.
double steering_time = 1.0; // time to go from 0 to +1 (or from 0 to -1)
double throttle_time = 1.0; // time to go from 0 to +1
double braking_time = 0.3; // time to go from 0 to +1
driver.SetSteeringDelta(render_step_size / steering_time);
driver.SetThrottleDelta(render_step_size / throttle_time);
driver.SetBrakingDelta(render_step_size / braking_time);
driver.Initialize();
// 传感器部分
auto manager = chrono_types::make_shared<ChSensorManager>(gator.GetSystem());
manager->scene->AddPointLight({
100, 100, 100 }, {
2, 2, 2 }, 5000);
auto lidar_extrinsics = chrono::ChFrame<double>({
0, 0, 1 }, Q_from_AngAxis(0, {
1, 0, 0 }));
// Lidar from JSON file - Velodyne VLP-16
auto vlp16 = chrono::sensor::Sensor::CreateFromJSON(GetChronoDataFile("sensor/json/Velodyne/HDL-32E.json"), gator.GetChassisBody(), lidar_extrinsics);
vlp16->PushFilter(chrono_types::make_shared<ChFilterSavePtCloud>("C:/Users/larrydong/Desktop/lidar_output/")); // 包含这个filter,在每次Apply对应的filter时(update中),会执行保存到文件,并输出Beam count
manager->AddSensor(vlp16);
// ---------------
// Simulation loop
// ---------------
// output vehicle mass
std::cout << "VEHICLE MASS: " << gator.GetVehicle().GetMass() << std::endl;
// Number of simulation steps between miscellaneous events
int render_steps = (int)std::ceil(render_step_size / step_size);
// Initialize simulation frame counters
int step_number = 0;
int render_frame = 0;
float orbit_radius = 10.f;
float orbit_rate = 1;
ChRealtimeStepTimer realtime_timer; // Ch
while (vis->Run()) {
double time = gator.GetSystem()->GetChTime();
chrono::sensor::UserXYZIBufferPtr data_ptr;
data_ptr = vlp16->GetMostRecentBuffer< chrono::sensor::UserXYZIBufferPtr>();
if (data_ptr->Buffer) {
using namespace std;
cout << "==> Width: " << data_ptr->Width << ", height: " << data_ptr->Height << ", ts: " << data_ptr->TimeStamp << ", launched count: " << data_ptr->LaunchedCount << endl;
}
manager->Update();
// Render scene and output POV-Ray data
if (step_number % render_steps == 0) {
vis->BeginScene();
vis->Render(); // 这一步更新的lidar?
vis->EndScene();
render_frame++;
}
// Get driver inputs
DriverInputs driver_inputs = driver.GetInputs();
// Update modules (process inputs from other modules)
driver.Synchronize(time);
terrain.Synchronize(time);
gator.Synchronize(time, driver_inputs, terrain);
vis->Synchronize(time, driver_inputs);
// Advance simulation for one timestep for all modules
driver.Advance(step_size);
terrain.Advance(step_size);
gator.Advance(step_size);
vis->Advance(step_size);
// Increment frame number
step_number++;
// Spin in place for real time to catch up
realtime_timer.Spin(step_size);
}
return 0;
}
还是建议参考官方的两个demo:

5、小结
吐槽一下Chrono的官方文档,有些内容讲的真的不透彻;
个人建议:采用Filter的方式输出lidar数据,避免用Buffer的方式判断有无更新、而且效率也不一定高。Filter的输出在“sensor更新->延迟->Advance”后存储,文件名是“编号.csv”,可以通过采集频率确定每个编号对应的时间戳。