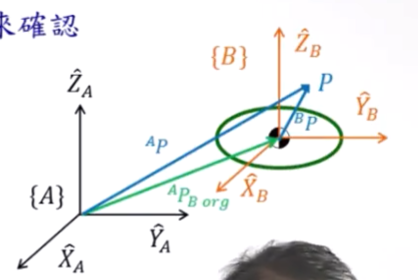
对于仅有移动,由上图可知:
A P = B P + A P B o r g ^AP=^BP+^AP_{B org} AP=BP+APBorg

对于仅有转动,可得:
A P = B A R B P ^AP=^A_BR^BP AP=BARBP
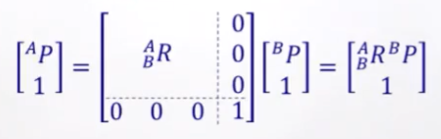
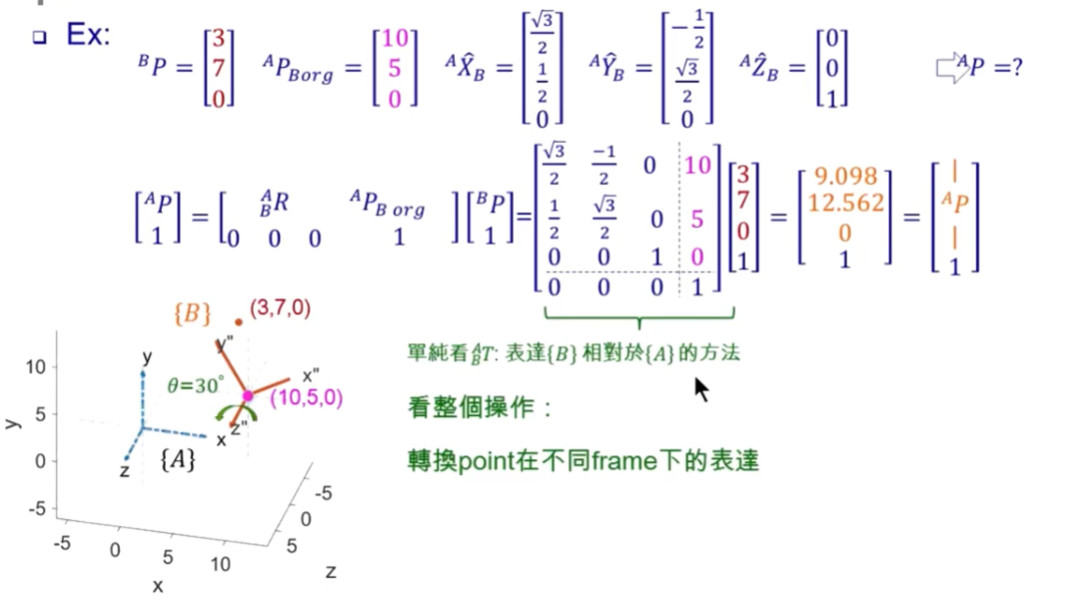
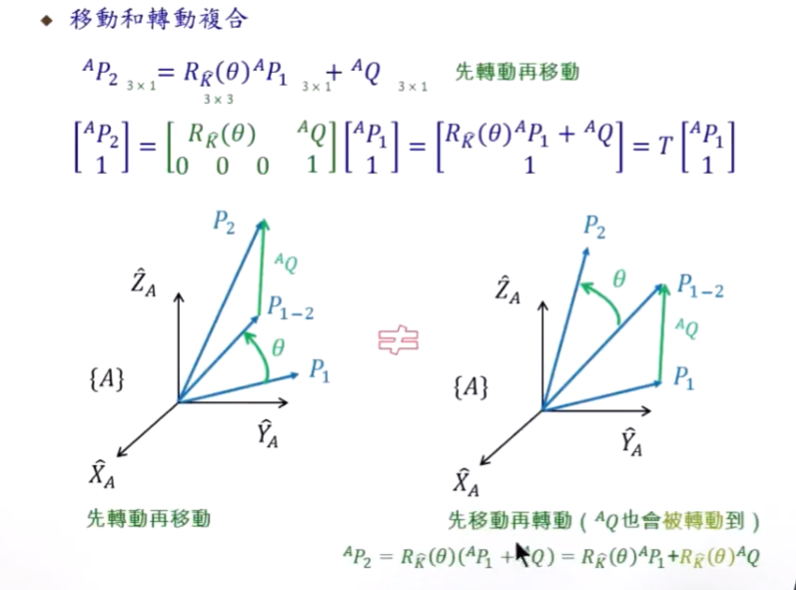
将转动与移动混合后,可得:

一个例子
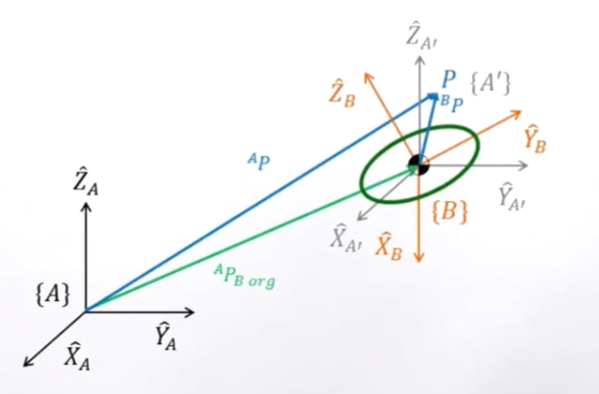
在向量中,齐次变换矩阵也是由旋转和移动组成,但要注意的是先转动在移动,要是先移动在转动,如右下角所示,并不是我们想要的结果。
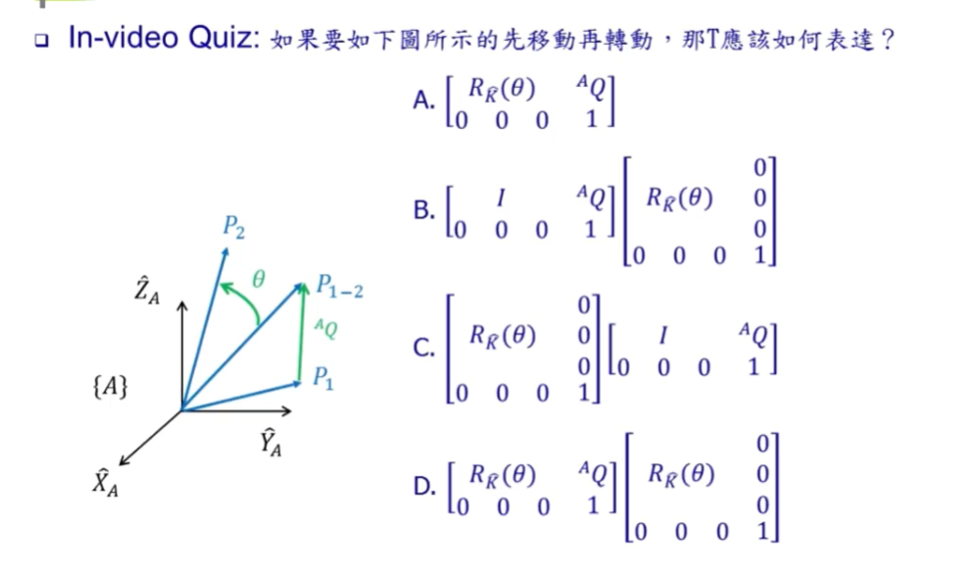
先移动在转动,C——即右侧的矩阵先于向量相乘,左侧的旋转矩阵之后相乘。
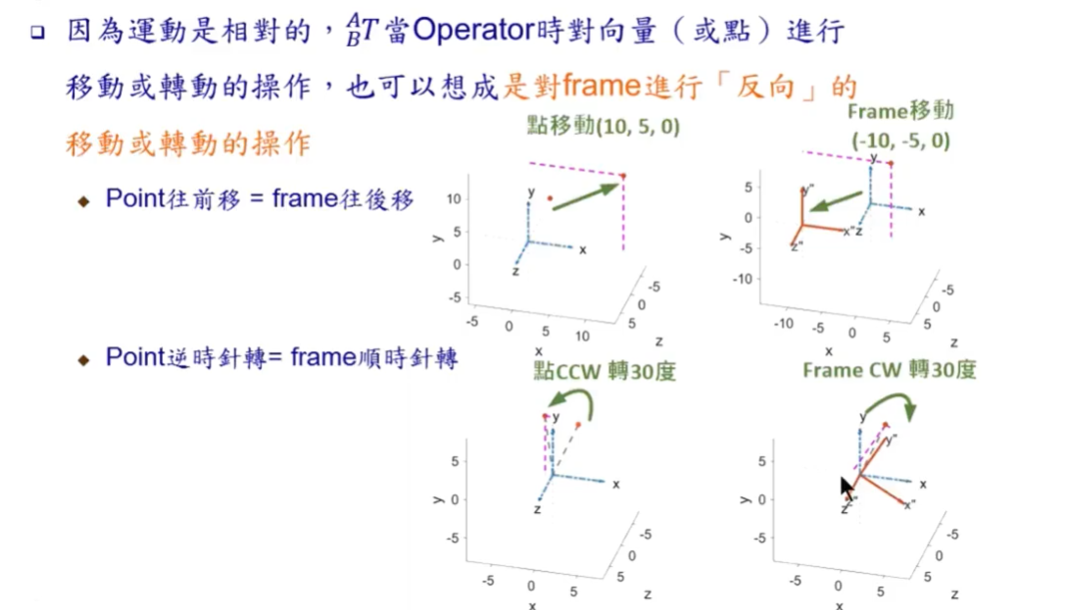
点与坐标系的相对位置关系,点向前移动,与坐标系向后移动相同。
连续运算

A P B o r g + B A R B P C o r g {}^AP_{Borg}+{}_B^AR^BP_{Corg} APBorg+BARBPCorg ,是因为如果要平移,需要将 B P C o r g ^BP_{Corg} BPCorg转化为在A坐标系下的值,因此需要乘旋转矩阵。
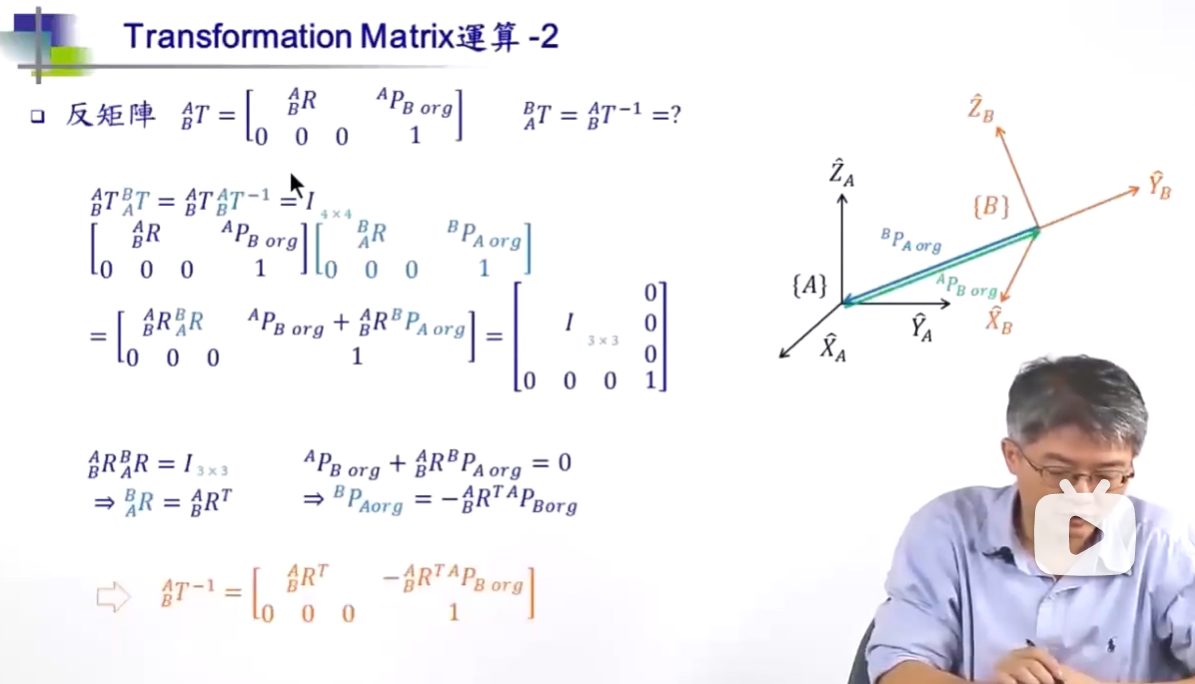
求齐次矩阵的逆,由于是正交矩阵,因此可以通过转置来求逆,但是移动部分不能进行简单的转置变换,因为是在B坐标系下的平移量,因此需要乘旋转矩阵。

![[足式<span style='color:red;'>机器人</span>]Part2 Dr. CAN<span style='color:red;'>学习</span>笔记-Ch0-1<span style='color:red;'>矩阵</span>的导数<span style='color:red;'>运算</span>](https://img-blog.csdnimg.cn/direct/c7499731c8c04e97a668d03762c8104c.png)



















![[C#] 如何使用ScottPlot.WPF在WPF桌面程序中绘制图表](https://img-blog.csdnimg.cn/direct/a515a0e2e278425e8711b9a76f644ae7.png)






![IAR报错:Error[Pa045]: function “halUartInit“ has no prototype](https://img-blog.csdnimg.cn/direct/8faa20d6942e48149edf46e928bceb8f.png)