目录
设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480
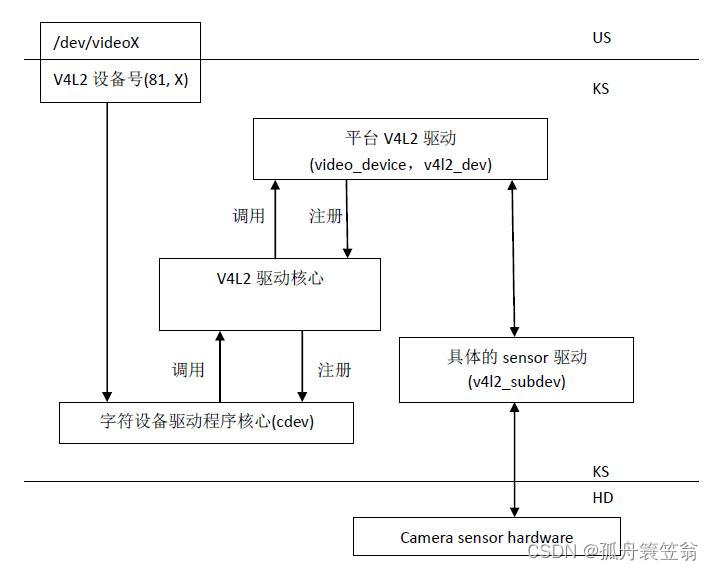
qt由于在arm qt版本下,没有多媒体库,所以,arm qt程序要访问摄像头,那么必须要使用linux操作系统v412(video for linux 2)机制
简单来说就是要在arm上安装v412框架就可以使用摄像头
跟内核进行数据通信的函数
#include <stropts.h>
int ioctl(int fildes,int request,.../* arg */);
- 第一个参数:fd文件描述符
- 第二个参数:要发送的命令
- VIDIOC_REQBUFS:分配内存
- VIDIOC_QUERYBUF:把 VIDIOC_REQBUFS 中分配的数据缓存转换成物理地址
- VIDIOC_QUERYCAP:查询驱动功能
- VIDIOC_ENUM_FMT:获取当前驱动支持的视频格式
- VIDIOC_S_FMT:设置当前驱动的频捕获格式
- VIDIOC_G_FMT:读取当前驱动的频捕获格式
- VIDIOC_TRY_FMT:验证当前驱动的显示格式
- VIDIOC_CROPCAP:查询驱动的修剪能力
- VIDIOC_S_CROP:设置视频信号的边框
- VIDIOC_G_CROP:读取视频信号的边框
- VIDIOC _QBUF:把数据放回缓存队列
- VIDIOC_DQBUF:把数据从缓存中读取出来
- VIDIOC_$TREAMON:开始视频显示函数
- VIDIOC_STREAMOFF:结束视频显示函数
- VIDIOC_QUERYSTD:检查当前视频设备支持的标准,例如 PAL或NTSC。
- ....:变参接口,根据第二个参数来决定
编程步骤
- 打开摄像头文件 /dev/videox
- 获取当前主机上的摄像头列表信息
- #define VIDIOC_ENUM_FMT _IOWR('V',2,struct v412_fmtdesc)
- struct v412_fmtdesc fmt;
- ioctl(fd,VIDIOC_ENUM_FMT,&fmt);
- #define VIDIOC_ENUM_FMT _IOWR('V',2,struct v412_fmtdesc)
- 设置当前视频捕捉格式
- 也就是设置摄像头采集画面的宽度、高度、格式
- VIDIOC_S_FMT:设置当前驱动的视频捕捉格式
- #define VIDIOC_S_FMT _IOWR('V',5,struct v412_format)
- struct v412_format format;
- format.宽度 = 640;
- format.高度 = 400;
- ioctl(fd,VIDIOC_S_FMT,&format);
- 申请内核缓冲区队列VIDIOC_REQBUFS
- 一般会将摄像头获取到的数据放到4块内存空间---一次性存储4帧画面数据
- 将申请的内核缓冲区队列映射到用户空间VIDIOC_QUERYBUF
- 开启摄像头VIDIOC_STREAMON
- 将开启摄像头的命令从应用层发送到内核层中,内核层就会驱动这个摄像头开始工作
- while(1)
- 采集数据 --yuyv格式
- 注意;摄像头采集出来的图像数据格式组成是yuyv
- 将采集出来的一帧画面yuyv格式的数据转为rgb格式
- 将转换好rgb格式数据显示到ui控件上
- 采集数据 --yuyv格式
c代码
头文件
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <string.h>
#include <linux/videodev2.h> //v4l2视频开发框架
#include <sys/mman.h>
打开摄像头文件 /dev/videox
//打开摄像头文件返回文件描述符
int fd = open("/dev/video7",O_RDWR);
if(fd == -1)
{
perror("open camera error");
return -1;
}获取当前主机上(开发板)摄像头列表信息
//2、获取当前主机上(开发板)摄像头列表信息
//#define VIDIOC_ENUM_FMT _IOWR('V', 2, struct v4l2_fmtdesc)
struct v4l2_fmtdesc v4fmt; //定义一个结构体
v4fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //视频捕捉类型
int i = 0;
while(1)
{
v4fmt.index = i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&v4fmt);
if(ret < 0)
{
//perror("获取失败");
break;
}
printf("index = %d\n",v4fmt.index);
printf("flags = %d\n",v4fmt.flags);
printf("description = %s\n",v4fmt.description);
unsigned char*p = (unsigned char*)&v4fmt.pixelformat;
printf("pixelformat = %c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("reserved = %d\n",v4fmt.reserved[0]);
}设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480
//3、设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480
//#define VIDIOC_S_FMT _IOWR('V', 5, struct v4l2_format)
//发送VIDIOC_S_FMT命令需要定义struct v4l2_format结构体,
//该结构体存放摄像头的画面格式,将摄像头设置为视频捕捉模式需要用到struct v4l2_format结构体
struct v4l2_format vfmt;
//设置为视频捕捉模式
vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
vfmt.fmt.pix.width = 640;// 设置宽(因为底层驱动已固定大小,不能任意改)
vfmt.fmt.pix.height = 480;//设置高度
vfmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; //设置视频采集格式
//将设置好的格式发送到摄像头
ioctl(fd,VIDIOC_S_FMT,&vfmt);
//设置完通过VIDIOC_G_FMT这个命令来查看格式有没有设置成功
//#define VIDIOC_G_FMT _IOWR('V', 4, struct v4l2_format) //获取格式
memset(&vfmt,0,sizeof(vfmt)); //清空结构体
//设置为视频捕捉模式
vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
//获取的格式信息存放在该结构体中
int ret = ioctl(fd,VIDIOC_G_FMT,&vfmt);
if(ret < 0)
{
perror("获取格式失败");
return -1;
}
//获取成功判断它的宽和高和模式
if(vfmt.fmt.pix.width == 640 && vfmt.fmt.pix.height == 480 && vfmt.fmt.pix.pixelformat == V4L2_PIX_FMT_YUYV )
{
printf("设置成功\n");
}else{
printf("设置失败\n");
}在内核空间中,申请一个缓冲区队列(队列中有4块缓冲区)
//4、在内核空间中,申请一个缓冲区队列(队列中有4块缓冲区)
//发送VIDIOC_REQBUFS命令需要struct v4l2_requestbuffers结构体
struct v4l2_requestbuffers reqbuffers;
reqbuffers.count = 4; //申请4个缓冲区
reqbuffers.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;// 摄像头采集模式
reqbuffers.memory = V4L2_MEMORY_MMAP; // mmap内存映射
//向内核空间打一个报告,向你申请4个缓冲区队列,申请的方式为内存映射
ret = ioctl(fd,VIDIOC_REQBUFS,&reqbuffers); //获取的信息存放在该结构体
if(ret < 0)
{
perror("申请队列空间失败");
return -1;
}将申请好的缓冲区队列 映射到 用户空间中
//5、将申请好的缓冲区队列映射到用户空间中
//#define VIDIOC_QUERYBUF _IOWR('v',9,struct v4l2_buffer)
//这个数组有4个元素,每个元素存储的是地址,存储的地址就是映射成功之后的地址
unsigned char* mptr[4];
unsigned int size[4];
//发送VIDIOC_QUERYBUF命令需要struct v4l2_buffer结构体
struct v4l2_buffer mapbuffer;
mapbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;// 摄像头采集模式
for(int i=0;i<4;i++){
mapbuffer.index = i; //申请的缓冲区编号
//发送VIDIOC_QUERYBUF命令来查询内核空间队列
ret = ioctl(fd,VIDIOC_QUERYBUF,&mapbuffer);
if(ret < 0) {
perror("查询内核空间队列失败\n");
return -1;
}
//mmap真正来实现内存映射 ,该函数的返回值是一个内存的首地址
mptr[i] = (unsigned char*)mmap(NULL,mapbuffer.length,PROT_READ|PROT_WRITE,MAP_SHARED,fd,mapbuffer.m.offset);
size[i] = mapbuffer.length;
//通知使用完毕,----放回内核
//#define VIDIOC_QBUF _IOWR('V', 15, struct v4l2_buffer)
ret = ioctl(fd,VIDIOC_QBUF,&mapbuffer);
if(ret < 0){
perror("放回失败\n");
return -1;
}
}开启摄像头
//6、开启摄像头
//#define VIDIOC_STREAMON _IOW('V', 18, int)
int type = V4L2_BUF_TYPE_VIDEO_CAPTURE;// 摄像头采集模式
//发送VIDIOC_QUERYBUF命令来开启摄像头
ioctl(fd,VIDIOC_STREAMON,&type);采集数据 yuyv
unsigned char buffer[640*480*3] = {0};//采集后的数据
int size;
//发送命令采集数据函数
get_frame(buffer,&size);
//获取图片
void get_frame(unsigned char*buffer,int *size)
{
//1、先查询 当前帧数据 到底 在哪个 缓冲区中
//采集数据 --VIDIOC_DQBUF:把数据从缓存中读取出来
//#define VIDIOC_DQBUF _IOWR('V', 17, struct v4l2_buffer)
//发送VIDIOC_DQBUF需要struct v4l2_buffer结构体
struct v4l2_buffer readbuffer;
readbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//采集模式
//发送VIDIOC_DQBUF采集数据放到结构体里
int ret = ioctl(fd,VIDIOC_DQBUF,&readbuffer);
if(ret < 0)
{
perror("提取数据失败");
return -1 ;
}
//使用内存拷贝 -- void *memcpy(void *dest, const void *src, size_t n);
memcpy(buffer,mptr[readbuffer.index],readbuffer.length);
*size = readbuffer.length;
//VIDIOC_QBUF:把数据放回缓存队列
//通知内核已使用完毕
//#define VIDIOC_QBUF _IOWR('V', 15, struct v4l2_buffer)
ret = ioctl(fd,VIDIOC_QBUF,&readbuffer);
if(ret < 0)
{
perror("放回队列失败");
return -1 ;
}
}将采集出来的yuyv格式的数据---转换成 rgb
unsigned char rgb[640*480*3] = {0};//转换后的数据
//8、将采集出来的yuyv格式的数据---转换成 rgb
yuyv2rgb0(buffer, rgb, 640, 480);
//将yuyv格式转为rgb格式
int yuyv2rgb0(unsigned char *yuv, unsigned char *rgb, unsigned int width, unsigned int height)
{
unsigned int in, out;
int y0, u, y1, v;
unsigned int pixel24;
unsigned char *pixel = (unsigned char *)&pixel24;
unsigned int size = width*height*2;
for(in = 0, out = 0; in < size; in += 4, out += 6)
{
y0 = yuv[in+0];
u = yuv[in+1];
y1 = yuv[in+2];
v = yuv[in+3];
sign3 = 1;
pixel24 = yuyv2rgb(y0, u, v);
rgb[out+0] = pixel[0];
rgb[out+1] = pixel[1];
rgb[out+2] = pixel[2];
pixel24 = yuyv2rgb(y1, u, v);
rgb[out+3] = pixel[0];
rgb[out+4] = pixel[1];
rgb[out+5] = pixel[2];
}
return 0;
}将c代码移植到qt代码中,在qt的界面显示摄像头画面
新建一个ui界面,布局一个两个按钮用于开启,停止,一个QLabel显示画面
通过定时器来调整帧数
新建一个MCamera摄像头类,将c代码移植进去
MCamera摄像头类添加头文件,成员,函数接口
extern "C"{
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <string.h>
#include <linux/videodev2.h> //v4l2视频开发框架
#include <sys/mman.h>
#include <unistd.h>
}
class MCamera
{
public:
MCamera(const char*deviceName = "/dev/video7");
void start();//启动摄像头
void stop();//关闭摄像头
void get_frame(unsigned char*buffer,int *size);//获取图像数据
int yuyv2rgb0(unsigned char *buffer, unsigned char *rgbdata, int w, int h);//yuyv转为rgb
private:
int fd;//摄像头文件描述符
unsigned char* mptr[4];//这个数组有4个元素,每个元素存储的是地址,存储的地址就是映射成功之后的地址
unsigned int size[4];//图像的大小
bool captrueFlag;//拍照标志位
};实现MCamera摄像头类函数接口
MCamera::MCamera(const char*deviceName )
{
//1、打开摄像头文件
//打开摄像头文件返回文件描述符
fd = open(deviceName,O_RDWR);
if(fd == -1)
{
perror("open camera error");
return ;
}
//2、获取当前主机上(开发板)摄像头列表信息
//#define VIDIOC_ENUM_FMT _IOWR('V', 2, struct v4l2_fmtdesc)
struct v4l2_fmtdesc v4fmt; //定义一个结构体
v4fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //视频捕捉类型
int i = 0;
while(1)
{
v4fmt.index = i++;
int ret = ioctl(fd,VIDIOC_ENUM_FMT,&v4fmt);
if(ret < 0)
{
//perror("获取失败");
break;
}
printf("index = %d\n",v4fmt.index);
printf("flags = %d\n",v4fmt.flags);
printf("description = %s\n",v4fmt.description);
unsigned char*p = (unsigned char*)&v4fmt.pixelformat;
printf("pixelformat = %c%c%c%c\n",p[0],p[1],p[2],p[3]);
printf("reserved = %d\n",v4fmt.reserved[0]);
}
//3、设置当前摄像头的画面格式 比如说 设置 采集图像的宽度为640 高度 480
//#define VIDIOC_S_FMT _IOWR('V', 5, struct v4l2_format)
struct v4l2_format vfmt;
vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
vfmt.fmt.pix.width = 640;// 设置宽(因为底层驱动已固定大小,不能任意改)
vfmt.fmt.pix.height = 480;//设置高度
vfmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; //设置视频采集格式
ioctl(fd,VIDIOC_S_FMT,&vfmt);
//#define VIDIOC_G_FMT _IOWR('V', 4, struct v4l2_format) //获取格式
memset(&vfmt,0,sizeof(vfmt)); //清 零结构体
vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int ret = ioctl(fd,VIDIOC_G_FMT,&vfmt); //获取的 信息存 放在该结构体
if(ret < 0)
{
perror("获取格式失败");
return ;
}
if(vfmt.fmt.pix.width == 640 && vfmt.fmt.pix.height == 480 && vfmt.fmt.pix.pixelformat == V4L2_PIX_FMT_YUYV )
{
printf("设置成功\n");
}else{
printf("设置失败\n");
}
//4、在内核空间中,申请一个缓冲区队列(队列中有4块缓冲区)
struct v4l2_requestbuffers reqbuffers;
reqbuffers.count = 4; //申请4个缓冲区
reqbuffers.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;// 摄像头采集
reqbuffers.memory = V4L2_MEMORY_MMAP; // mmap
//向内核空间打一个报告,向你申请4个缓冲区队列,申请的方式为内存映射
ret = ioctl(fd,VIDIOC_REQBUFS,&reqbuffers); //获取的 信息存 放在该结构体
if(ret < 0)
{
perror("申请队列空间失败");
return ;
}
//5、将申请好的缓冲区队列 映射到 用户空间中
struct v4l2_buffer mapbuffer;
mapbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
for(int i=0;i<4;i++){
mapbuffer.index = i; //申请的缓冲区编号
ret = ioctl(fd,VIDIOC_QUERYBUF,&mapbuffer);
if(ret < 0) {
perror("查询内核空间队列失败\n");
return ;
}
//真正来实现内存映射 ,该函数的返回值是一个内存的首地址
mptr[i] = (unsigned char*)mmap(NULL,mapbuffer.length,PROT_READ|PROT_WRITE,MAP_SHARED,fd,mapbuffer.m.offset);
size[i] = mapbuffer.length;
//通知使用完毕,----放回内核
//#define VIDIOC_QBUF _IOWR('V', 15, struct v4l2_buffer)
ret = ioctl(fd,VIDIOC_QBUF,&mapbuffer);
if(ret < 0){
perror("放回失败\n");
return ;
}
}
}
void MCamera::start()
{
//6、开启摄像头
//#define VIDIOC_STREAMON _IOW('V', 18, int)
int type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl(fd,VIDIOC_STREAMON,&type);
}
void MCamera::stop()
{
//[8] 停止采集
int type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int ret = ioctl(fd,VIDIOC_STREAMOFF,&type);
//释放内存 int munmap(void *addr, size_t length);
for(int i=0;i<4;i++)
{
munmap(mptr[i],size[i]);
}
//[9] 关闭设备
::close(fd);
}
void MCamera::get_frame(unsigned char *buffer, int *size)
{
//采集数据 --VIDIOC_DQBUF:把数据从缓存中读取出来
//#define VIDIOC_DQBUF _IOWR('V', 17, struct v4l2_buffer)
//1、先查询 当前帧数据 到底 在哪个 缓冲区中
struct v4l2_buffer readbuffer;
readbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int ret = ioctl(fd,VIDIOC_DQBUF,&readbuffer);
if(ret < 0)
{
perror("提取数据失败");
return ;
}
//使用内存拷贝 -- void *memcpy(void *dest, const void *src, size_t n);
memcpy(buffer,mptr[readbuffer.index],readbuffer.length);
*size = readbuffer.length;
//VIDIOC_QBUF:把数据放回缓存队列
//通知内核已使用完毕
//#define VIDIOC_QBUF _IOWR('V', 15, struct v4l2_buffer)
ret = ioctl(fd,VIDIOC_QBUF,&readbuffer);
if(ret < 0)
{
perror("放回队列失败");
return ;
}
}
int MCamera::yuyv2rgb0(unsigned char *buffer, unsigned char *rgbdata, int w, int h)
{
int r1, g1, b1;
int r2, g2, b2;
for(int i=0; i<w*h/2; i++)
{
char data[4];
memcpy(data, buffer+i*4, 4);
//Y0U0Y1V1 -->[Y0 U0 V1] [Y1 U0 V1]
unsigned char Y0=data[0];
unsigned char U0=data[1];
unsigned char Y1=data[2];
unsigned char V1=data[3];
r1 = Y0+1.4075*(V1-128); if(r1>255)r1=255; if(r1<0)r1=0;
g1 =Y0- 0.3455 * (U0-128) - 0.7169*(V1-128); if(g1>255)g1=255; if(g1<0)g1=0;
b1 = Y0 + 1.779 * (U0-128); if(b1>255)b1=255; if(b1<0)b1=0;
r2 = Y1+1.4075*(V1-128);if(r2>255)r2=255; if(r2<0)r2=0;
g2 = Y1- 0.3455 * (U0-128) - 0.7169*(V1-128); if(g2>255)g2=255; if(g2<0)g2=0;
b2 = Y1 + 1.779 * (U0-128); if(b2>255)b2=255; if(b2<0)b2=0;
rgbdata[i*6+0]=r1;
rgbdata[i*6+1]=g1;
rgbdata[i*6+2]=b1;
rgbdata[i*6+3]=r2;
rgbdata[i*6+4]=g2;
rgbdata[i*6+5]=b2;
}
}
在主ui界面类加入头文件,成员,函数接口
#include <QTimer>
#include "mcamera.h"
private slots:
void onUpdateCameraUi();
private:
MCamera *m_camera;//自定义摄像头类
QTimer *m_timer;//定时器类在构造函数中初始化摄像头类和定时器类,并关联定时器的槽函数
m_camera = NULL;
m_timer = new QTimer;
connect(m_timer,&QTimer::timeout,this,&Widget::onUpdateCameraUi);开启摄像头按钮点击事件
if(m_camera == NULL)
{
m_camera = new MCamera;
m_camera->start();
//启动定时器,间隔时间采集图像数据
m_timer->start(1); //1秒钟采集 一张画面(一帧画面)
}关闭摄像头按钮点击事件
if(m_camera != NULL)
{
m_timer->stop();
m_camera->stop();
delete m_camera;
m_camera = NULL;
}拍照按钮点击事件
captrueFlag=true;定时器槽函数实现
// 采集数据
unsigned char buffer[640*480*3] = {0};
unsigned char rgb[640*480*3] = {0};
int size;
m_camera->get_frame(buffer,&size);
//yuyv转换rgb
m_camera->yuyv2rgb0(buffer,rgb,640,480);
//显示 源图像rgb --->pic对象
QImage img = QImage(rgb,640,480,QImage::Format_RGB888);
//保存为图片
if(captrueFlag)
{
img.save("1.bmp");
captrueFlag = false;
}
QPixmap pic = QPixmap::fromImage(img);
ui->label->setPixmap(pic);在linux中交叉编译放到开发板上运行