0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进行实际项目的开发和调试的工程能力。
🚀详情:《ROS从入门到精通》
1 Docker与机器人应用
Docker是一个开源的容器化平台,用于构建、发布和运行应用程序。它允许开发人员将应用程序及其依赖项打包为一个轻量级、可移植的容器中,并在不同的环境中运行。Docker容器提供了一种隔离机制,使得应用程序能够在相同的硬件上以相同的方式运行,而不需要担心环境依赖问题。此外,Docker还提供了一组工具,用于管理、部署和扩展容器化应用程序。由于Docker的便捷性和灵活性,它已经成为现代应用程序开发和部署的标准之一。
Docker的核心概念包括以下几个方面:
镜像(Image):Docker镜像是一个只读文件,其中包含了应用程序运行所需的所有依赖关系和配置信息。开发人员可以使用Dockerfile文件来定义镜像,然后使用Docker构建工具来生成镜像。
容器(Container):Docker容器是基于镜像创建的可运行实例。容器提供了一个独立的运行环境,可以在其中运行应用程序,并与其他容器和主机操作系统隔离开来。容器在启动时会复制镜像,然后根据镜像中定义的配置信息启动应用程序。
仓库(Repository):Docker仓库用于存储和管理Docker镜像。开发人员可以将自己创建的镜像上传到公共或私有仓库中,以供其他人使用或共享。
Dockerfile:Dockerfile是一个文本文件,其中包含了定义Docker镜像的指令。例如,它可以定义镜像的基础操作系统、安装软件包、设置环境变量等。
Docker Compose:Docker Compose是一个工具,可以定义和运行多个Docker容器组成的应用程序。使用Docker Compose,开发人员可以轻松地定义和部署复杂的应用程序,而无需手动管理每个容器。
Docker Swarm:Docker Swarm是一个原生的Docker集群管理工具,用于在多个Docker主机之间分配和管理容器。使用Docker Swarm,开发人员可以轻松地扩展应用程序,并提高其可用性和可靠性。

在机器人应用中,Docker具有重要的意义和作用。以下是几个方面:
隔离性:由于机器人应用涉及到许多组件,例如操作系统、软件包、库、驱动程序等,这些组件之间可能存在依赖关系和冲突。使用Docker可以将这些组件打包到一个容器中,使其与其他容器和主机操作系统隔离开来,从而避免了这些依赖关系和冲突。
可移植性:在机器人应用中,通常需要在不同的设备上运行应用程序,例如在不同的机器人、云服务器或本地计算机上运行。使用Docker可以将应用程序及其依赖项打包为一个可移植的容器,在不同的设备上以相同的方式运行,从而提高了应用程序的可移植性和可靠性。
简化部署:机器人应用通常需要部署到多个设备上,例如在不同的机器人、云服务器或本地计算机上运行。使用Docker可以轻松地部署应用程序,并确保每个设备上运行的应用程序都一致。
提高效率:在机器人应用中,通常需要频繁地测试和部署应用程序。使用Docker可以快速创建和销毁容器,从而提高了测试和部署的效率。
2 Docker安装步骤
首先,更新软件包索引,并且安装必要的依赖
sudo apt update
sudo apt install apt-transport-https ca-certificates curl gnupg-agent software-properties-common
由于Docker的官方源下载比较慢,需要更换为国内源,例如腾讯源
- 添加
Docker使用的GPG公钥curl -fsSL https://mirrors.cloud.tencent.com/docker-ce/linux/ubuntu/gpg | sudo apt-key add - - 添加
Docker远程仓库并再次更新软件包索引sudo add-apt-repository "deb [arch=amd64] https://mirrors.cloud.tencent.com/docker-ce/linux/ubuntu $(lsb_release -cs) stable" sudo apt-get update
接着安装最新版本的Docker
sudo apt install docker-ce docker-ce-cli containerd.io
更换Docker的镜像源为国内源,否则部署Docker内部应用时安装依赖的速度很慢
sudo gedit /etc/docker/daemon.json
复制以下代码
{
"registry-mirrors": [
"https://mirror.ccs.tencentyun.com",
"https://docker.mirrors.ustc.edu.cn"
]
}
重启Docker完成安装
sudo systemctl restart docker
测试Docker是否安装成功
sudo docker run hello-world

安装完成后只有root用户可以使用Docker命令,非root用户会显示拒绝访问
winter@winter:~$ docker images
permission denied while trying to connect to the Docker daemon socket at unix:///var/run/docker.sock: Get "http://%2Fvar%2Frun%2Fdocker.sock/v1.24/images/json": dial unix /var/run/docker.sock: connect: permission denied
为了使普通用户也能访问Docker,需要进行用户组配置
- 添加
Dockergroupsudo groupadd docker - 将当前非
root用户添加到Docker的groupsudo gpasswd -a ${ USER} docker - 增加
docker.sock文件的权限sudo chmod a+rw /var/run/docker.sock - 重启服务
sudo service docker restart - 新开一个终端以普通用户测试
Docker命令winter@winter:~$ docker images REPOSITORY TAG IMAGE ID CREATED SIZE hello-world latest d2c94e258dcb 8 months ago 13.3kB
Docker的版本卸载则采用以下命令
sudo apt remove docker docker-engine docker.io containerd runc
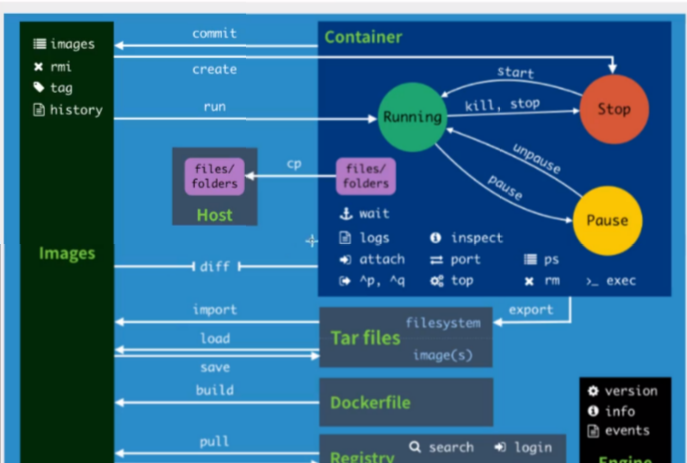
3 Docker常用命令
3.1 创建与启动容器
create命令从Docker镜像创建一个全新的容器,但不会立即运行它
docker create IMAGE[:TAG]
start命令将启动任何已停止的容器
docker start IMAGE[:TAG]
run命令式上述两种命令的结合,用于创建并启动容器
docker run [OPTIONS] IMAGE[:TAG] [COMMAND] [ARG...]
Docker提供了非常丰富的命令参数
-d, --detach=false 指定容器运行于前台还是后台,默认为false
-i, --interactive=false 打开STDIN,用于控制台交互
-t, --tty=false 分配tty设备,该可以支持终端登录,默认为false
-u, --user="" 指定容器的用户
-a, --attach=[] 登录容器(必须是以docker run -d启动的容器)
-w, --workdir="" 指定容器的工作目录
-c, --cpu-shares=0 设置容器CPU权重,在CPU共享场景使用
-e, --env=[] 指定环境变量,容器中可以使用该环境变量
-m, --memory="" 指定容器的内存上限
-P, --publish-all=false 指定容器暴露的端口
-p, --publish=[] 指定容器暴露的端口
-h, --hostname="" 指定容器的主机名
-v, --volume=[] 给容器挂载存储卷,挂载到容器的某个目录
--volumes-from=[] 给容器挂载其他容器上的卷,挂载到容器的某个目录
--cap-add=[] 添加权限
--cap-drop=[] 删除权限
--cidfile="" 运行容器后,在指定文件中写入容器PID值,一种典型的监控系统用法
--cpuset="" 设置容器可以使用哪些CPU,此参数可以用来容器独占CPU
--device=[] 添加主机设备给容器,相当于设备直通
--dns=[] 指定容器的dns服务器
--dns-search=[] 指定容器的dns搜索域名,写入到容器的/etc/resolv.conf文件
--entrypoint="" 覆盖image的入口点
--env-file=[] 指定环境变量文件,文件格式为每行一个环境变量
--expose=[] 指定容器暴露的端口,即修改镜像的暴露端口
--link=[] 指定容器间的关联,使用其他容器的IP、env等信息
--lxc-conf=[] 指定容器的配置文件,只有在指定--exec-driver=lxc时使用
--name="" 指定容器名字,后续可以通过名字进行容器管理,links特性需要使用名字
--net="bridge" 容器网络设置:
bridge 使用docker daemon指定的网桥
host //容器使用主机的网络
container:NAME_or_ID >//使用其他容器的网络,共享IP和PORT等网络资源
none 容器使用自己的网络(类似--net=bridge),但是不进行配置
--privileged=false 指定容器是否为特权容器,特权容器拥有所有的capabilities
--restart="no" 指定容器停止后的重启策略:
no:容器退出时不重启
on-failure:容器故障退出(返回值非零)时重启
always:容器退出时总是重启
--rm=false 指定容器停止后自动删除容器(不支持以docker run -d启动的容器)
--sig-proxy=true 设置由代理接受并处理信号,但是SIGCHLD、SIGSTOP和SIGKILL不能被代理
在容器启动后,可以在其他终端通过
docker exec -it <container ID> /bin/bash
进入该容器
3.2 暂停与删除容器
使用
docker ps -a
查看所有容器的运行状态,对于不需要使用的容器可以使用
- 删除
docker rm <container ID> - 暂停
docker stop <container ID> - 清除所有处于终止状态的容器
docker container prune
对于不需要的镜像则可以使用
docker rmi <image ID>
删除。注意,删除某个镜像前需要删除所有使用该镜像的容器
3.3 容器文件拷贝
主要分为两种
- 从容器内拷出
docker cp <container ID>:path_in_container path_out_container - 从外部拷贝文件到容器内
docker cp path_out_container <container ID>:path_in_container
3.4 构建镜像与上下文
通过Dockerfile来制作镜像
docker build -f ./Dockerfile -t IMAGE:Tag /opt
参数如下
-f #指定Dockerfile文件,不指定默认为当前路径的Dockerfile
-t #指定新生成的镜像名:Tag
/opt #代表构建镜像的上下文,通常使用点(.)表示在当前路径
其工作原理是
- 客户端执行
build构建命令 - 客户端将构建命令后面指定的路径
/opt下的所有文件打包发送给Docker服务端,缺省则为当前目录 - 服务端收到并解压客户端发送的包,根据Dockerfile里的指令进行镜像的分层构建
这里的/opt称为Docker的上下文路径
🔥 更多精彩专栏: