ROS 环境变量详解(ROS EnvironmentVariables)
在进行实机测试时发生了一件事, 我通过网线连接到机器人, 机器人IP: 192.168.250.100, 我的IP: 192.168.250.145, 但是在配置联调时我的ROS_MASTER_URI=http://10.168.2.14, 此时我在PC启动的launch文件可以挂到机器人上的rosmaster下, 与机器人本机的节点进行通信, 这就已经很神奇了
此外, 我在尝试在机器人端以及PC发送消息, 互相又收不到, 但是在机器人端收发是可以的, 在PC收发, 也时可以的, 于是引发了我的好奇, 下面是我的调研结果
参考资料
官方说明: ROS/EnvironmentVariables
查看ROS的环境变量
在Ubuntu的终端输入以下命令
env | grep ROS
如果没有单独配置其他的环境变量, 至少你可以看到下面的几个内容, 我将其重现排列一下
# ROS版本信息
ROS_VERSION=1
ROS_DISTRO=noetic
ROS_PYTHON_VERSION=3
# ROS包的位置(正常情况下使用roscd可以自动切换到这个目录下, 比如roscd std_msgs)
# 当你通过sudo apt install ros-<rosdistro>-<package>-<name> 下载包以后
# 默认路径也在这里
ROS_PACKAGE_PATH=/opt/ros/noetic/share
ROSLISP_PACKAGE_DIRECTORIES=
ROS_ETC_DIR=/opt/ros/noetic/etc/ros
ROS_ROOT=/opt/ros/noetic/share/ros
# 如果需要去进行联合调试就需要配置改变量
ROS_MASTER_URI=http://localhost:11311
环境变量概览
ROS环境变量的作用大致分为以下几种
寻找包的位置, 主要用于搭配roslaunch或者rosrun这样的命令, 此时两个环境变量就会发生作用
- Effecting a Node runtime: There are also several ROS environment variables that effect how a Node runs. The
ROS_MASTER_URIis an important environment variable that tells a Node where the Master is.ROS_IPandROS_HOSTNAMEaffect the network address of a Node andROS_NAMESPACElets you change its namespace.ROS_LOG_DIRlets you set the directory where log files are written. Many of these can be overridden by [Remapping Arguments](https://wiki.ros.org/Remapping Arguments) as well, which have precedence over environment variables.
影响ROS节点的运行, 比如想要把master挂在哪个IP下, ROS产生日志的目录, ROS的变量空间的名称等, 而里面的ROS_NAMESPACE等可以通过重映射来重新改变
Modifying the build system:
ROS_BINDEPS_PATH,ROS_BOOST_ROOT,ROS_PARALLEL_JOBS, andROS_LANG_DISABLEaffect where libraries are found, how they are built, and which ones are built.
这几个环境变量的作用是影响库的查找、构建方式等
ROS_ROOT
该环境变量指定了roscore的位置, 主要是一些rosbuild相关的配置文件
上文可以看到, ROS_ROOT为/opt/ros/noetic/share/ros, 切换到该目录, 可以看到一些配置文件
/opt/ros/noetic/share/ros/config 该目录下存放的是rosconsole控制台的配置
/opt/ros/noetic/share/ros/core/rosbuild 这里存放的是**构建(rosbuild)**相关的配置文件, 例如FindPkgConfig.cmake等等
ROS_PACKAGE_PATH
这个应该都很熟悉, 就是ros包的位置, 当你想要使用一个ros包例如roslaunch turtle_tf2 turtle_tf2_demo.launch , ros会自动在该目录下查找是否存在, 如果存在就可以使用双tab补全并运行
当使用source <catkin_ws>/devel/setup.bash时, 也会改变这个环境变量, ros会自动把这个包的路径添加到ROS_PACKAGE_PATH, 这里需要注意: 新添加的路径会在前面, 也就是说, 当你运行同名包时, ros会优先考虑catkin_ws/src下的包, 这一点可以通过env | grep ROS 查看环境变量的变化, 例如
source ~/test/devel/setup.bash
env | grep ROS
# 输出的内容如下
ROS_PACKAGE_PATH=/home/smile/test/src:/opt/ros/noetic/share
因此, 需要十分注意使用source的顺序, 之前还遇到过互相冲突的情况, 但我忘了例子是什么后来一般在进行source时, 尤其是写在bash文件中的source时, 总会加一个标志--extend, 这样在前面的路径下找不到包时, 会往后寻找, 直到所有路径下都没有包时才报错, 以下回答是GPT4的原文
让我们通过一个具体的例子来说明
source devel/setup.bash和source devel/setup.bash --extend命令的区别。假设你正在开发两个不同的ROS项目,它们分别位于
~/ros_workspace1和~/ros_workspace2两个工作区。每个工作区都有自己的包和环境设置。
- 不使用
--extend:
- 当你在终端执行
source ~/ros_workspace1/devel/setup.bash时,你的环境变量(例如ROS_PACKAGE_PATH)将被设置为仅包含ros_workspace1中的路径。- 然后,如果你在同一个终端执行
source ~/ros_workspace2/devel/setup.bash,环境变量将被更新为仅包含ros_workspace2的路径。这将覆盖之前ros_workspace1的设置。
- 使用
--extend:
- 首先执行
source ~/ros_workspace1/devel/setup.bash。- 然后,在同一个终端执行
source ~/ros_workspace2/devel/setup.bash --extend。这时,ros_workspace2的路径被添加到环境变量中,而不会覆盖掉ros_workspace1的路径。通过使用
--extend选项,你可以同时访问两个工作区中的包和资源。这对于需要在多个项目之间进行切换和整合的开发者来说非常有用。这样,你就可以在不同的工作区间灵活地共享和测试代码,而不需要每次都重置整个环境变量
我对这段回答做了测试, 发现确实是被覆盖了, 整个终端的内容如下
不使用--extend
smile@smile:~$ cd test/
smile@smile:~/test$ source devel/setup.bash
smile@smile:~/test$ env | grep ROS
ROS_VERSION=1
ROS_PYTHON_VERSION=3
ROS_PACKAGE_PATH=/home/smile/test/src:/opt/ros/noetic/share
ROSLISP_PACKAGE_DIRECTORIES=/home/smile/test/devel/share/common-lisp
ROS_ETC_DIR=/opt/ros/noetic/etc/ros
ROS_MASTER_URI=http://localhost:11311
ROS_ROOT=/opt/ros/noetic/share/ros
ROS_DISTRO=noetic
smile@smile:~/test$ cd ~/Desktop/github/
smile@smile:~/Desktop/github$ source devel/setup.bash
smile@smile:~/Desktop/github$ env | grep ROS
ROS_VERSION=1
ROS_PYTHON_VERSION=3
ROS_PACKAGE_PATH=/home/smile/Desktop/github/src:/opt/ros/noetic/share
ROSLISP_PACKAGE_DIRECTORIES=/home/smile/Desktop/github/devel/share/common-lisp
ROS_ETC_DIR=/opt/ros/noetic/etc/ros
ROS_MASTER_URI=http://localhost:11311
ROS_ROOT=/opt/ros/noetic/share/ros
ROS_DISTRO=noetic
使用--extend
smile@smile:~$ cd test/
smile@smile:~/test$ source devel/setup.bash
smile@smile:~/test$ env | grep ROS
ROS_VERSION=1
ROS_PYTHON_VERSION=3
ROS_PACKAGE_PATH=/home/smile/test/src:/opt/ros/noetic/share
ROSLISP_PACKAGE_DIRECTORIES=/home/smile/test/devel/share/common-lisp
ROS_ETC_DIR=/opt/ros/noetic/etc/ros
ROS_MASTER_URI=http://localhost:11311
ROS_ROOT=/opt/ros/noetic/share/ros
ROS_DISTRO=noetic
smile@smile:~/test$ cd ~/Desktop/github/
smile@smile:~/Desktop/github$ source devel/setup.bash --extend
smile@smile:~/Desktop/github$ env | grep ROS
ROS_VERSION=1
ROS_PYTHON_VERSION=3
ROS_PACKAGE_PATH=/home/smile/Desktop/github/src:/home/smile/test/src:/opt/ros/noetic/share
ROSLISP_PACKAGE_DIRECTORIES=/home/smile/Desktop/github/devel/share/common-lisp:/home/smile/test/devel/share/common-lisp
ROS_ETC_DIR=/opt/ros/noetic/etc/ros
ROS_MASTER_URI=http://localhost:11311
ROS_ROOT=/opt/ros/noetic/share/ros
ROS_DISTRO=noetic
ROS_MASTER_URI
单台主机(PC) , 分两个终端进行测试
运行roslaunch的终端配置 localhost:11311
终端1(执行ROS节点的终端)环境变量如下, 在整个单元该终端环境不变
ROS_VERSION=1
ROS_PYTHON_VERSION=3
ROS_PACKAGE_PATH=/home/smile/test/src:/opt/ros/noetic/share
ROSLISP_PACKAGE_DIRECTORIES=/home/smile/test/devel/share/common-lisp
ROS_ETC_DIR=/opt/ros/noetic/etc/ros
ROS_MASTER_URI=http://localhost:11311
ROS_ROOT=/opt/ros/noetic/share/ros
ROS_DISTRO=noetic
roslaunch自动生成的log中可以看到以下内容
smile@smile:~/test$ roslaunch pointcloud_concatenate lidar_processor.launch
... logging to /home/smile/.ros/log/360e2c34-b66e-11ee-a6d2-9bbe57a404cc/roslaunch-smile-16628.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
# 注意看这一句
started roslaunch server http://smile:33215/
# 还有这一句
auto-starting new master
process[master]: started with pid [16636]
ROS_MASTER_URI=http://localhost:11311
我去查了本机的hosts, 为什么两个不在一起?
smile@smile:~$ cat /etc/hosts
127.0.0.1 localhost
127.0.1.1 smile
我问了GPT, 回答简单总结来说是这样的
ROS_MASTER_URI在同一个局域网下, 或者说整个系统中应该只存在一个主要作用是负责在节点之间交换信息, 当相关节点的ROS_MASTER_URI一致时, 节点之间就可以进行通信, 通常意义上的rostopic pub 就是将消息发到该地址, 同时由其他机器配置了相同ROS_MASTER_URI就可以进行通信
-
需要注意的是, 这个ROS_MASTER_URI需要是一个实际存在的网络接口
roslaunch server在局域网下可以存在很多, 这个server的作用是负责节点的管理, 与消息通信无关, 因此不用太在意这个server
因此虽然这个server我没有配置, 但是节点之间通信是正常的, 即, 两个终端不进行任何配置时, 是可以进行通信的
接收端 ROS_MASTER_URI=http://localhost:11311
ROS_VERSION=1
ROS_PYTHON_VERSION=3
ROS_PACKAGE_PATH=/home/smile/test/src:/opt/ros/noetic/share
ROSLISP_PACKAGE_DIRECTORIES=/home/smile/test/devel/share/common-lisp
ROS_ETC_DIR=/opt/ros/noetic/etc/ros
ROS_MASTER_URI=http://localhost:11311
ROS_ROOT=/opt/ros/noetic/share/ros
ROS_DISTRO=noetic
可以正常通信
接收端ROS_MASTER_URI=http://10.168.2.183:11311
通过export ROS_MASTER_URI=http://ip:11311 修改 ROS_MASTER_URI
我的ip为10.168.2.183:11311
因此在发布终端测试如下
smile@smile:~/test$ export ROS_MASTER_URI=http://10.168.2.183:11311
smile@smile:~/test$ env | grep ROS_MASTER_URI
ROS_MASTER_URI=http://10.168.2.183:11311
smile@smile:~/test$ rostopic list | grep safe
/safe_lidar_state
smile@smile:~/test$ rostopic echo /tf_static
transforms:
-
header:
seq: 0
stamp:
secs: 1705629496
nsecs: 954055797
frame_id: "lidar"
child_frame_id: "base_link"
transform:
translation:
x: 0.0
y: -1.0
z: -0.5
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
同样可以在这里进行通信, 获取话题列表, 获取消息
所以在这里, localhost跟本机ip, 都可以作为收发ros消息的uri, 而且可以同时收发localhost的消息
接收端ROS_MASTER_URI=http://123.123.123.123:11311
通过export ROS_MASTER_URI=http://123.123.123.123:11311 修改为新的网口, 该网口不存在, 随便写的
测试如下:
smile@smile:~/test$ export ROS_MASTER_URI=http://123.123.123.123:11311
smile@smile:~/test$ rostopic list | grep safe
无任何反应, 且整个终端阻塞在这行命令上, 需要Ctrl C终结, 因此不存在的网口无法和ROS通信
接收端ROS_MASTER_URI=http://192.168.158.145:11311
通过export ROS_MASTER_URI=http://ip:11311 修改为新的网口, 该网口是主机和雷达通信的网口
测试如下:
smile@smile:~/test$ export ROS_MASTER_URI=http://192.168.158.145:11311
smile@smile:~/test$ env | grep ROS_MASTER_URI
ROS_MASTER_URI=http://192.168.158.145:11311
smile@smile:~/test$ rostopic list | grep safe_lidar
/safe_lidar_state
smile@smile:~/test$ rostopic echo /tf_static
transforms:
-
header:
seq: 0
stamp:
secs: 1705629496
nsecs: 954055797
frame_id: "lidar"
child_frame_id: "base_link"
transform:
translation:
x: 0.0
y: -1.0
z: -0.5
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
神奇的事情发生了, 即使我把ROS_MASTER_URI修改成了网口的IP, 他竟然还能收到!
这甚至让我开始好奇是不是出了什么问题, 但是截图证明, 确实是在localhost
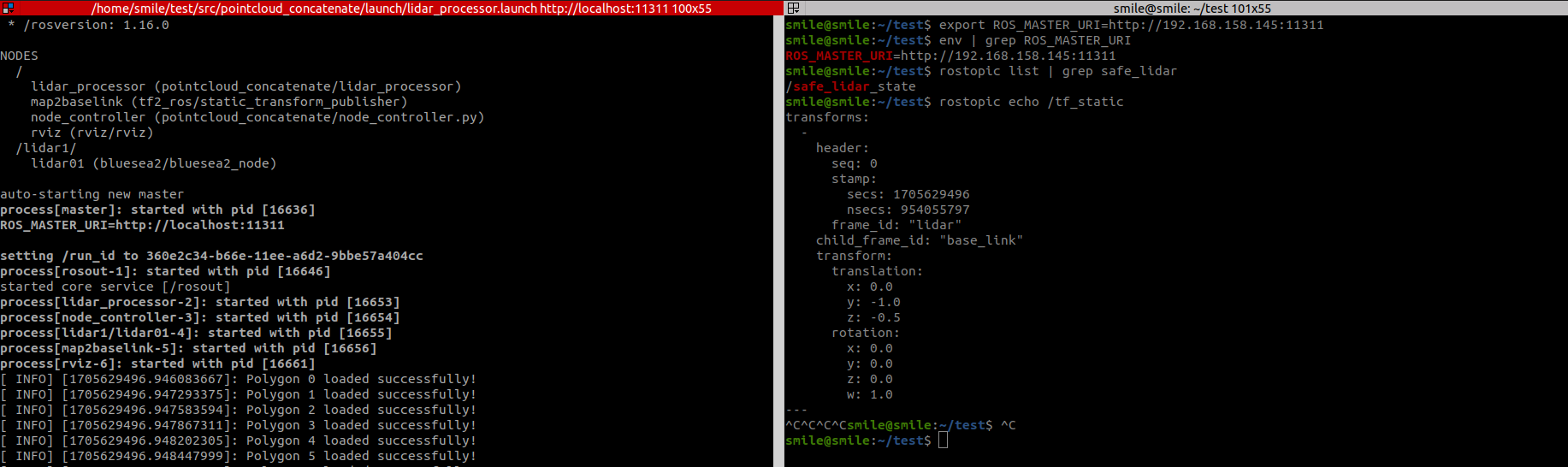
我只能将其解释为localhost在一台主机的任何终端, 可以代表任何存在于该主机硬件上的IP
两台主机 程序运行在10.168.2.177 接收端为10.168.2.183
roslaunch客户端: ROS_MASTER_URI=http://localhost:11311 接收端: ROS_MASTER_URI=http://localhost:11311
接收端:
smile@smile:~$ export ROS_MASTER_URI=http://localhost:11311
smile@smile:~$ rosnode list
ERROR: Unable to communicate with master!
无法读取消息, 显示没有master存在
roslaunch客户端: ROS_MASTER_URI=http://localhost:11311 接收端: ROS_MASTER_URI=http://10.168.2.177:11311
接收端:
smile@smile:~$ export ROS_MASTER_URI=http://10.168.2.177:11311
smile@smile:~$ rosnode list
/lidar1/lidar01
/lidar_processor
/map2baselink
/node_controller
/rosout
smile@smile:~$ rostopic echo /tf_static
transforms:
-
header:
seq: 0
stamp:
secs: 1706060435
nsecs: 182425397
frame_id: "lidar"
child_frame_id: "base_link"
transform:
translation:
x: 0.0
y: -1.0
z: -0.5
rotation:
x: 0.0
y: 0.0
z: 0.0
w: 1.0
---
当在接收端将ROS_MASTER_URI修改为执行端的IP时, 可以正常通信, 获取消息, 发布消息都是正常的
ROS_IP
ROS_IP环境变量在ROS(机器人操作系统)中的作用是指定其他ROS节点应该用来与当前节点通信的IP地址。这在多网卡环境或者复杂的网络配置中尤为重要。举个例子来说明其重要性:
假设你有一个机器人系统,其中包含多个计算节点(例如,一个笔记本电脑,一个台式机,和机器人上的一个嵌入式系统),它们都在同一个局域网中。每个计算节点都运行着一个或多个ROS节点(比如传感器数据处理器,控制算法,状态监视器等)。所有这些节点需要相互通信来交换信息,如传感器数据、控制命令等。
如果这些计算节点具有多个网络接口(例如,既有有线以太网连接,又有无线Wi-Fi连接),那么就需要明确指定哪个接口用于ROS通信。这就是
ROS_IP的作用所在。
示例场景:
- 台式机:有一个IP地址为192.168.1.101的有线连接,另一个IP地址为192.168.1.201的无线连接。
- 笔记本电脑:有一个IP地址为192.168.1.102的有线连接,另一个IP地址为192.168.1.202的无线连接。
- 机器人上的嵌入式系统:只有一个IP地址为192.168.1.103的无线连接。
不使用ROS_IP的情况:
- 如果不设置
ROS_IP,ROS节点可能会自动选择一个网络接口(例如,根据默认路由选择)。在这种情况下,台式机可能会通过其无线接口与笔记本电脑通信,但由于机器人只有无线连接,它可能无法与台式机的有线接口通信。
使用ROS_IP的情况:
- 在台式机上,设置
ROS_IP=192.168.1.101,确保所有ROS通信都通过有线接口进行。 - 在笔记本电脑上,设置
ROS_IP=192.168.1.102,同样确保通过有线接口进行通信。 - 机器人上的嵌入式系统只有一个网络接口,因此可能不需要设置
ROS_IP。
通过这种方式,所有节点都能够通过有线网络高效地相互通信,同时确保机器人能够通过无线连接加入到ROS网络中。这就体现了ROS_IP在确保正确和高效通信方面的重要性。