FiloBot通过模仿攀爬植物的生长方式——通过在顶端增加材料来构建身体,实现在难以预测和复杂的环境中的导航。这种设计理念的核心在于能够适应多种地形并克服障碍,特别适用于密集森林或杂乱区域这样的非结构化环境。机器人使用添加制造技术(特别是熔融沉积建模,FDM)来创造其生长结构。
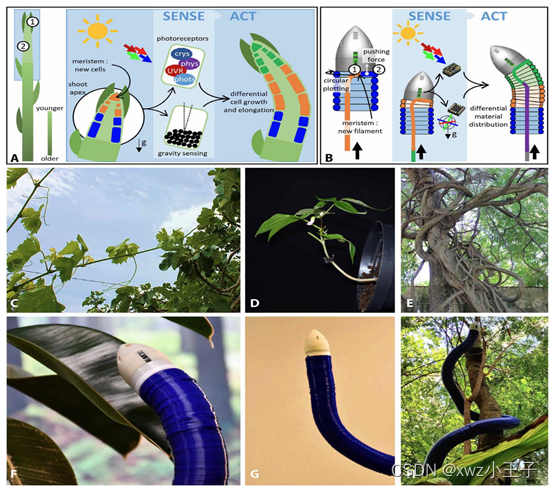
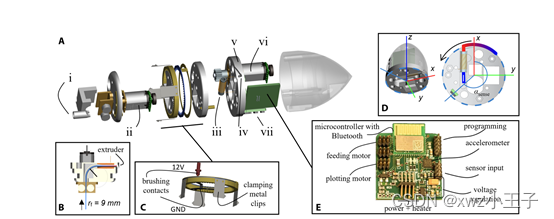
FiloBot的设计包括一个顶端机器人头部,用于热塑性材料的沉积和感应,以及一个由顶部生长而来的茎状身体。这种设计允许机器人根据环境刺激(例如光线和重力)自适应地调整其身体结构,从而在多样化的环境中导航。
FiloBot在操作中显示出了对多种环境刺激的适应性,包括光照和重力。FiloBot通过内置的传感器来捕捉环境中的光照和重力变化。这些传感器包括加速度计和数字颜色传感器,如VEML3328,用于感知光的强度和方向。机器人通过这些传感器,能够模仿植物的光向性和向地性行为。例如,它能够根据光照强度和方向调整生长方向,类似于植物的向光性。同时,它也能根据重力方向调整其生长,模仿植物的向地性。
在设计方面,FiloBot的尺寸、机动性、能效和丝材使用都经过精心计算和优化。这样的设计不仅确保了良好的机动性,还优化了能源效率和丝材的使用。FiloBot的机器人头部包括一个供料机制和绘图单元。供料机制通过一个直流电机拉动进入的丝材,并将其推送通过加热通道,然后从喷嘴挤出。此外,FiloBot能够根据不同的环境需求调整其身体的机械特性。例如,为了跨越空隙,它可以调整供料速度和挤出温度,以生长出更坚固的结构。这些设置确保了在跨越空隙时,机器人身体的稳定性和自我支撑能力。
FiloBot的研究展示了软体机器人技术在模仿自然界中生物的行为方面的巨大潜力,特别是在处理复杂和非结构化环境的导航问题上。这项研究不仅为软体机器人技术的发展提供了新的思路,还为未来在极端或复杂环境中的探索和监测提供了新的可能性。FiloBot通过其创新的设计和功能,展现了机器人技术与自然界生物功能相结合的未来方向。