- 什么是场景库?
- 场景库的作用。
- 场景库所面临的挑战。
- “加速度”。
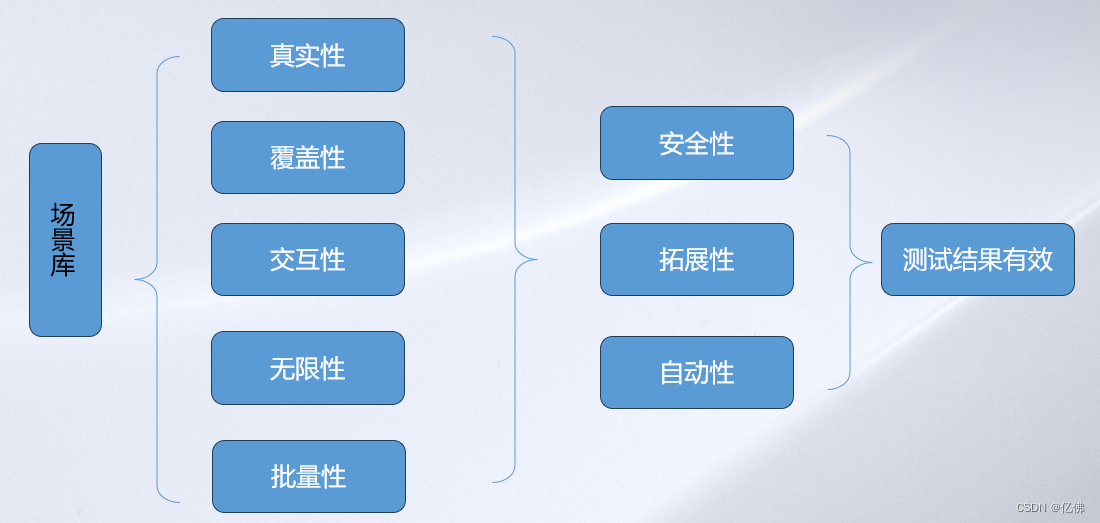
- 场景库的要素与特征。
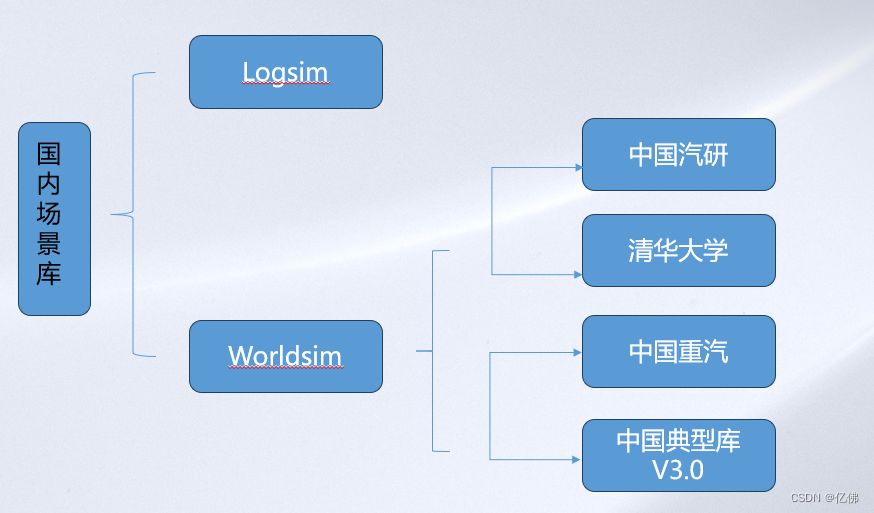
- 国内场景库与开源场景库。
- 场景的因素与细化因素分类。

什么是场景库?场景库作为智能网联汽车发展强有力的仿真支撑,既可以一方面提供数据,另一方面收集测试数据,通过虚拟现实等手段总结和更新库数据,是连接虚拟仿真和现实测试的桥梁。
测试场景库作为自动驾驶仿真的基础,是仿真建设的核心内容。
由于进行里程测试的汽车周期比较长,而且成本比较高,执行效率也比较低等问题,目前形成了以场景测试为主的自动驾驶技术路线;当然,现在已经有在进行自动驾驶路测阶段的实测,比如百度在北京进行的自动驾驶试验,滴滴在上海进行的自动驾驶试验。

场景库能以多种方式轻松高效地生成成千上万的仿真场景,有效地提升仿真测试的真实性、有效性以及覆盖率,为自动驾驶的量产保驾护航。
测试、验证、评价自动驾驶功能与性能的关键,贯穿自动驾驶车辆研发测试全生命周期
场景库三大特性:安全可靠性、优化快速部署使用性、高自由开发多源度更新性。
高效性:场景库中的场景可以快速部署到符合标准的仿真平台。

伴随着自动驾驶的日新月异的发展,各大车企与互联网公司纷纷转向自动驾驶行业。自动驾驶技术从L2+到L4的发展。面向高级别自动驾驶的落地需求。高阶的自动驾驶需要更加完善的测试场景与更加安全可靠的场景验证标准。
同济大学 朱西产提出了自动驾驶场景库建设思路:一个联盟+两个创新方法+三类接管场景,即探索AI算法依赖开放数据集+场景库数据集打通“三支柱”法(试验场测试“保真度”和AI渲染仿真测试“置信度”)+做好自动驾驶ODD边界、危险场景安全裕度不足、危险场景环境感知置信度不足三类接管。
仿真场景库建设与合作机制有待完善。
(1)场景库建设效率低、费用高。
(2)场景库规模不够大,多样性、覆盖性、可扩展性不强。
(3)场景有效性有待提高。
(4)测试场景中的测试真值及评估体系。
(5)场景库建立缺乏合作,资源重复性投入大。
自动驾驶仿真测试评价体系缺乏规范。由于不同仿真软件系统架构及场景库构建方法的不同,导致很难建立统一规范的仿真测试评价体系
自动驾驶L3系统、高度自动驾驶L4、完全自动驾驶L5等需要各种场景的功能要求,导致自动驾驶汽车测试与验证的场景数量呈几何级增加。评价自动驾驶系统算法重要的标准之一就是是否能够处理足够多的应用场景,自动驾驶系统能够处理的场景覆盖范围越大,可以行驶的边界范围就会更广。

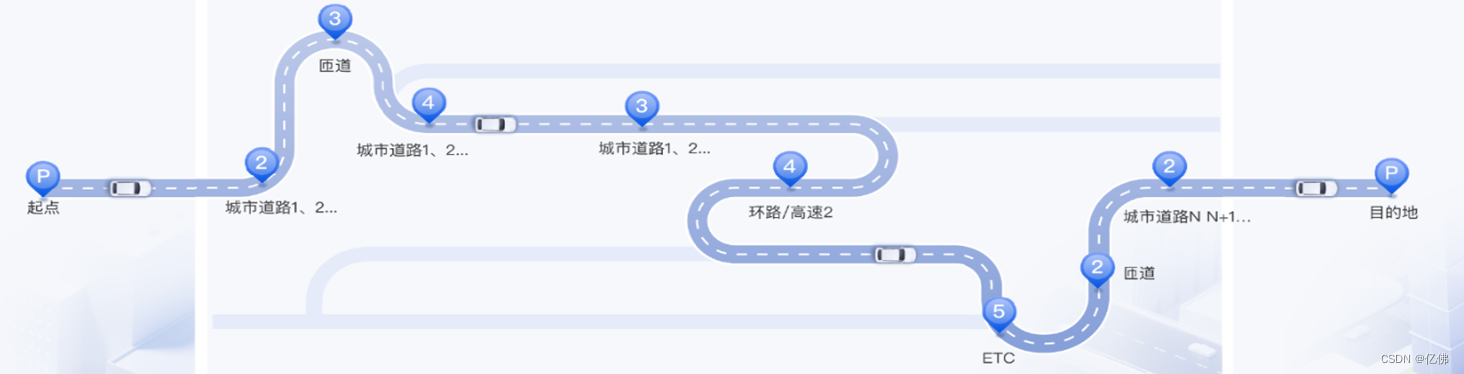
场景是自动驾驶汽车与行驶环境等各种要素在一段时间内的综合动态描述和应用,它具有不可预测、不可穷尽、处理复杂、灵活多类等特点。测试的场景包括了车辆自身的要素和相关外部要素等内容。场景库提供了覆盖绝大部分所需的测试场景。

自动驾驶安全的长尾场景—“未知的不安全场景”可能是由自动驾驶算法不足而无法全覆盖,以及当前出现L3+智能驾驶系统“算力高成本与用户体验不成正比,用户不为高算力买单”等问题。
2020年12月3日,在重庆召开的第五届i-VISTA智能网联汽车国际研讨会上,国家市场监管总局缺陷产品管理中心和中国汽研共同推出的中国典型驾驶场景库V3.0,新增1000余例真实车辆事故场景、自动驾驶事故场景和预期功能安全场景。

车辆自身因素包括:性能、位置、运动状态、几何、重量、驾驶属性、框架等;
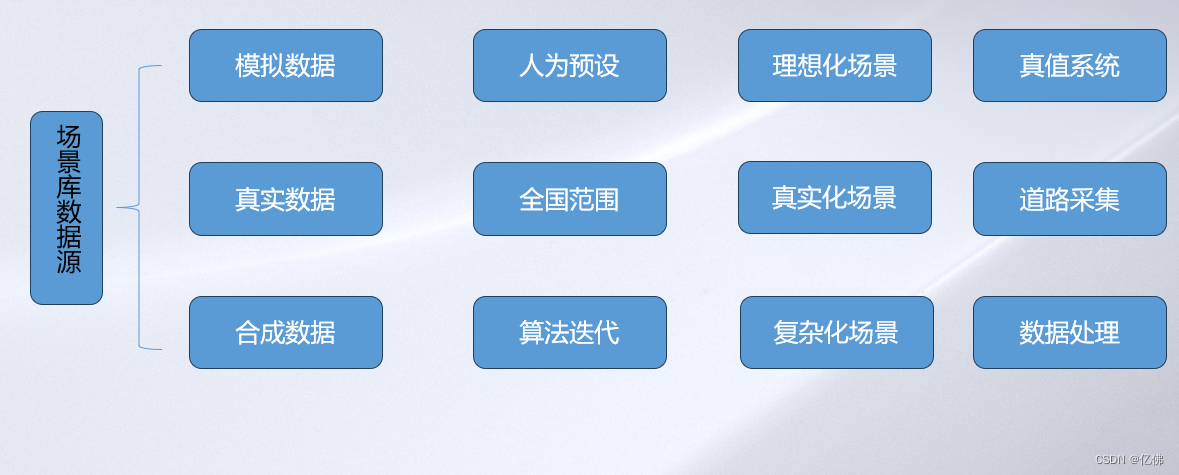
目前,各家的场景库的数据来源,均基于大范围、超长公里数的真实的路测采集的数据。以及人为的设定障碍物的行为与交通环境的行为。以及基于AI大模型处理大量的真实第三方数据进行二次编码的测试场景。
目前,此三类数据来源,可将低阶与高阶的自动驾驶测试场景覆盖。
 数据格式标准
数据格式标准