6 系统调试
本课题拥有蓝牙遥控以及红外遥控二种模式,红外遥控没有测距显示以及调节速度,其他的控制模式和蓝牙遥控一样。因而,本测试以蓝牙遥控为主。
6.1蓝牙遥控器功能介绍
蓝牙遥控器初始页面如图6.61所示,使用蓝牙遥控器之前用先点击连接蓝牙按钮,点击之后便会进入蓝牙选择页面如图6.1.2所示,选择本课题使用的蓝牙HC-05,点击之后便会显示连接成功或者失败。本课题以蓝牙选择成功为例,蓝牙成功后会显示选择速度进度条,初始值为1,最大值为5,如图6.6.1所示

6.1.1 蓝牙遥控器初始页面
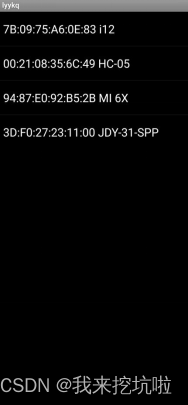
6.1.2 蓝牙选择页面

6.1.1 连接上蓝牙页面
该蓝牙遥控器有二种方式指令的方法,一种是根据蓝牙遥控器按键编码发送指令,蓝牙遥控器按键编码表如图5(b)所示,另一种是直接发送编码指令。当发送了相应的指令过去之后,遥控器接收数据的位置会显示所接收到的数据。
6.2复位功能测试
点击复位后,接收数据显示FW,系统进入清除所有数据并停车,小车进入自由控制模式。在该模式下,按下前进按键,小车前进,当松开按键时,小车停止。后退按键,左转按键,右转按键使用方式一样。除此之外,可以点击上面二组上下左右按键,第一组左右按键分别对应夹子的张开和关闭;第一组上下按键对应的是左臂的上下;第二组上下对应的是右臂的上下;第二组左右对应的是机械臂底板左右转动。机械臂清障如图6.2.1和图6.2.2所示。

6.2.1 机械臂搬运物体

6.2.1 机械臂放下物体
6.3 寻迹功能测试
当点击寻迹按键,接收数据显示Robot_Traction,系统进入寻迹模式,自动根据黑线行走。如图6.3.1所示。

6.3.1 小车寻迹
6.4 避障功能测试
当点击避障按键,接收数据显示bz,系统进入避障模式,当小车前方有障碍物,小车便停下来左右测距、判断、决策,从而完成自动避障。如图6.4.1所示。

6.4.1 小车避障
6.5 跟随功能测试
当点击跟随按键,接收数据显示gs,系统进入跟随模式,小车会根据前方物体的运动方向进行自行调整。如图6.5.1所示。

6.5.1 小车跟随
6.6 测距功能测试
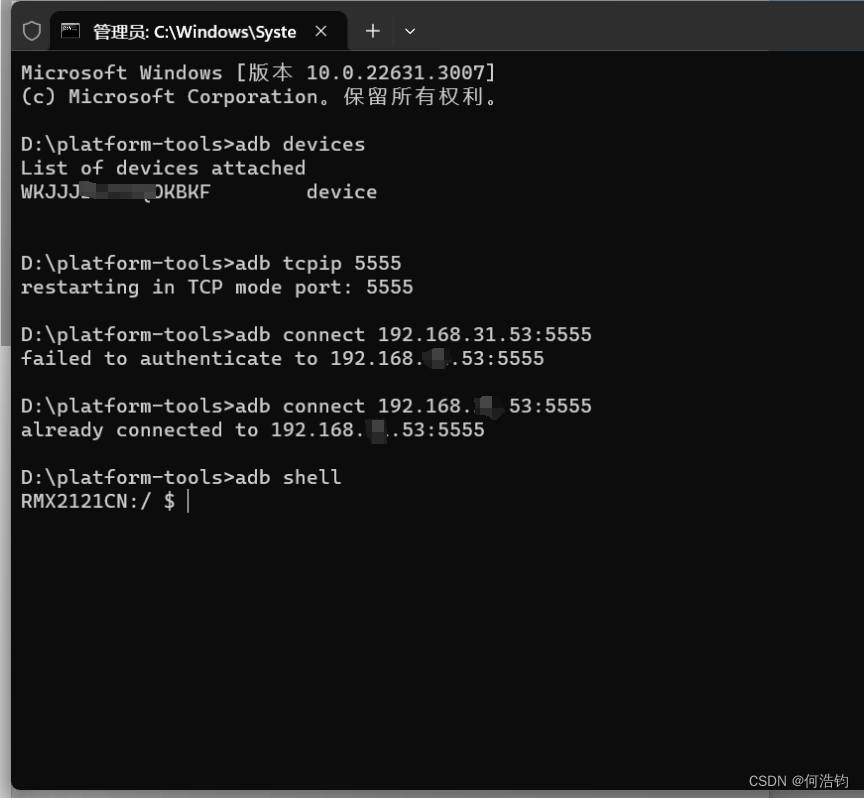
当点击测距按键,测量距离超出1米,接收数据显示Out of range,当测量的数据在2厘米到1米之间,接收数据显示则会显示distance=测量的厘米距离。如图6.6.1所示。

6.6.1 测距显示
6.7本章小结
本章主要讲述用蓝牙遥控器控制智能小车的全过程,以及展示了这些功能的如何使用,便附上了一些效果图。在调试阶段还发现一些问题:其一,便是使用PWM调速时左右二边速度很难相等,从而导致直线时可能有点偏离轨道,解决方法可以使用PWM差值调速或者考虑使用PID算法调速来解决;其二,跟随部分用的红外传感器安装过低,发送信号容易碰到凸出来的地面,从而影响实验的正常;其次,红外传感器还容易受到外面的红外光线影响,从而使小车一直接收到外来红外光线,时续输出高电平,进而对应的车轮一直运动。根本的解决方法是把把器件安装高一点,并把红外传感器更换为受干扰小的超声波传感器。不过,本课题用黑胶布把红外探头套住,从而抵挡住大部分外来光线,大大的优化了红外传感器的性能;其三,便是机械臂抖动问题,需把连续转动定时器时间调小,或者使用非连续转动,通过调节机械臂骨架来转动,本课题使用了机械臂夹子以及底部部分使用非连续转动,左右二臂使用连续转动的方法,从而大大的减轻机械臂抖动问题,以及解决了使用骨架制动时容易出现由于螺丝松动而出现机械臂掉落问题。至于机械臂运动时容易碰到小车超声波模块或者前方重量过重问题,可以从操作方面避免这个问题,或者重新设计小车构架,把其他器件放在机械臂下面。