前言
多智能体强化学习问题中的博弈论知识——联合策略与期望回报
一、MARL问题组成

二、联合策略与期望回报
定义一种普遍的期望回报,能够用于所有的多智能体与环境的交互模型当中,因此在POSG的环境下定义,定义了两个等式计算期望回报,如下:
1.History-based expected return
在联合策略 π \pi π给定下,智能体i的期望回报为:
U i ( π ) = E h ^ t ∼ ( P r 0 , T , O , π ) [ u i ( h ^ t ) ] = ∑ h ^ t ∈ H ^ Pr ( h ^ t ∣ π ) u i ( h ^ t ) \begin{aligned} U_i(\pi)& =\mathbb{E}_{\hat{h}^t\sim(\mathrm{Pr}^0,\mathcal{T},\mathcal{O},\pi)}\bigg[u_i(\hat{h}^t)\bigg] \\ &\begin{aligned}=\sum_{\hat{h}^t\in\hat{H}}\Pr(\hat{h}^t\mid\pi)u_i(\hat{h}^t)\end{aligned} \end{aligned} Ui(π)=Eh^t∼(Pr0,T,O,π)[ui(h^t)]=h^t∈H^∑Pr(h^t∣π)ui(h^t)
其中,H包含所有时刻的历史观测序列, Pr ( h ^ t ∣ π ) \Pr(\hat{h}^t\mid\pi) Pr(h^t∣π)代表给定策略下的所有历史观测的概率, Pr ( h ^ t ∣ π ) = Pr 0 ( s 0 ) O ( o 0 ∣ ∅ , s 0 ) ∏ τ = 0 t − 1 π ( a τ ∣ h τ ) T ( s τ + 1 ∣ s τ , a τ ) O ( o τ + 1 ∣ a τ , s τ + 1 ) \begin{aligned}\Pr(\hat{h}^t\mid\pi)=&\Pr^0(s^0)\mathcal{O}(o^0\mid\emptyset,s^0)\prod_{\tau=0}^{t-1}\pi(a^\tau\mid h^\tau)\mathcal{T}(s^{\tau+1}\mid s^\tau,a^\tau)\mathcal{O}(o^{\tau+1}\mid a^\tau,s^{\tau+1})\end{aligned} Pr(h^t∣π)=Pr0(s0)O(o0∣∅,s0)τ=0∏t−1π(aτ∣hτ)T(sτ+1∣sτ,aτ)O(oτ+1∣aτ,sτ+1)
u i ( h ^ t ) u_i(\hat{h}^t) ui(h^t)是智能体i在观测序列的折扣回报, u i ( h ^ t ) = ∑ τ = 0 t − 1 γ τ R i ( s τ , a τ , s τ + 1 ) u_i(\hat{h}^t)=\sum_{\tau=0}^{t-1}\gamma^\tau\mathcal{R}_i(s^\tau,a^\tau,s^{\tau+1}) ui(h^t)=∑τ=0t−1γτRi(sτ,aτ,sτ+1),使用 π ( a τ ∣ h τ ) \pi(a^\tau\mid h^\tau) π(aτ∣hτ)表示观测序列条件下,联合动作的概率分布,前提的假设是智能体之间的动作是独立的,因此 π ( a τ ∣ h τ ) = ∏ j ∈ I π j ( a j τ ∣ h j τ ) \pi(a^\tau\mid h^\tau)=\prod_{j\in I}\pi_j(a_j^\tau\mid h_j^\tau) π(aτ∣hτ)=∏j∈Iπj(ajτ∣hjτ)。
2.Recursive expected return
类似于贝尔曼方程的形式定义期望回报,首先定义了联合策略下的状态价值函数与动作价值函数
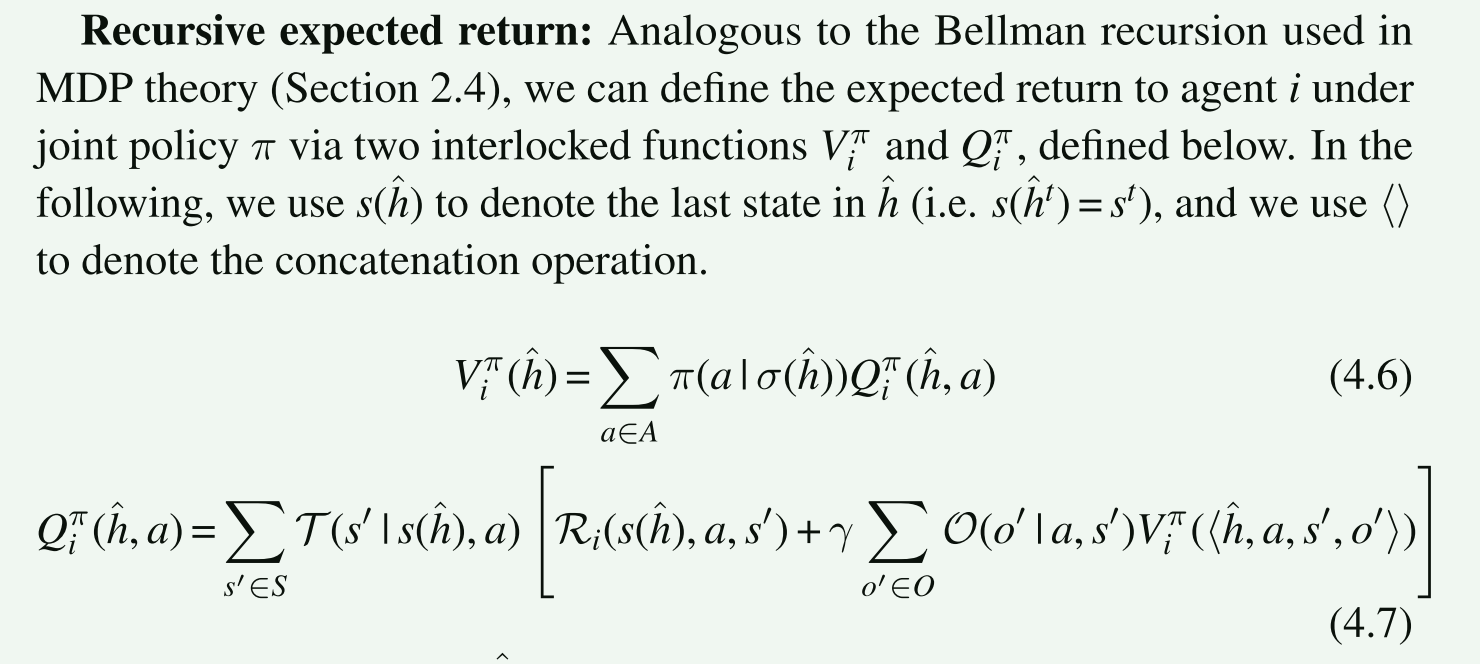
在这里 V i π ( h ^ ) V_i^\pi(\hat{h}) Viπ(h^)代表智能体i在给定策略下,所有历史序列取得的值,可以当期望回报,而 Q i π ( h ^ , a ) Q_i^\pi(\hat{h},a) Qiπ(h^,a)代表智能体i根据观测序列,在给定策略下,采取的联合动作带来的即使收益,进一步可以将回报期望写为: U i ( π ) = E s 0 ∼ P r 0 , o 0 ∼ O ( ⋅ ∣ ∅ , s 0 ) [ V i π ( ⟨ s 0 , o 0 ⟩ ) ] U_i(\pi){=}\mathbb{E}_{s^0\sim\mathrm{Pr}^0,o^0\sim\mathcal{O}(\cdot|\emptyset,s^0)}[V_i^\pi(\langle s^0,o^0\rangle)] Ui(π)=Es0∼Pr0,o0∼O(⋅∣∅,s0)[Viπ(⟨s0,o0⟩)]


















![[AutoSar]基础部分 RTE 08 runnable mapping](https://img-blog.csdnimg.cn/direct/84382a3c560e435da5ef2b99dfe01bc8.png)