无线图传设备介绍
2、jetson nano天空端数据采集+检测+保存
3、本地回传显示
1、无线图传设备介绍
由于本设计考虑将无人机得到检测结果实时回传给地面站显示,因此需要考虑一个远程无线通信设备进行传输。本设计采用思翼HM30图传设备。通过无线图传的wifi将天空端的桌面远程发送回地面站,地面站接收采用vnc viewer(jetson nano 开启vnc viewer功能 参考链接)
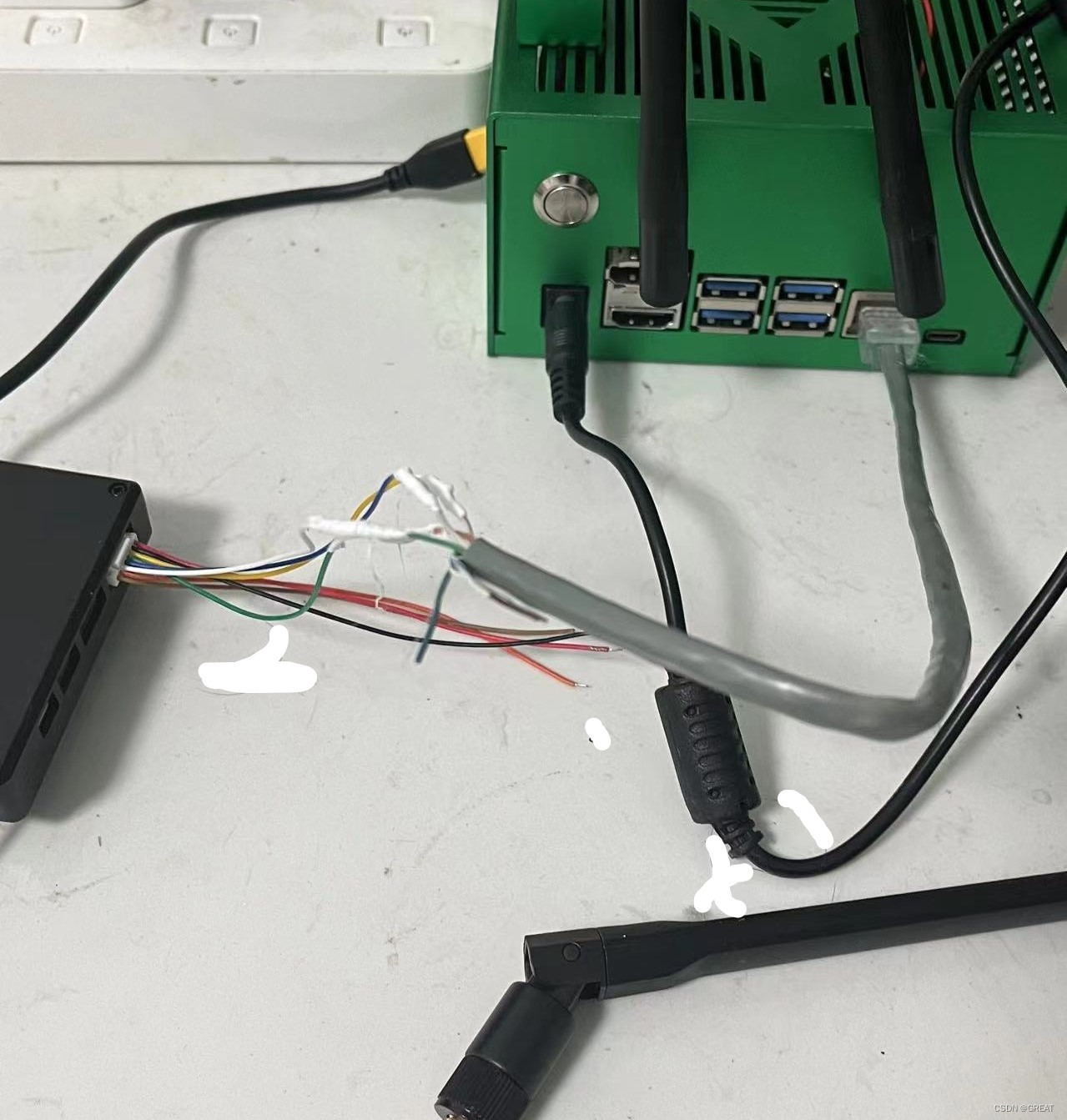
需要进行改造的地方是将网线和天空端的video传输线进行链接,改造图片接线如下:
天空端线序和网线线序的顺序对应关系如图所示
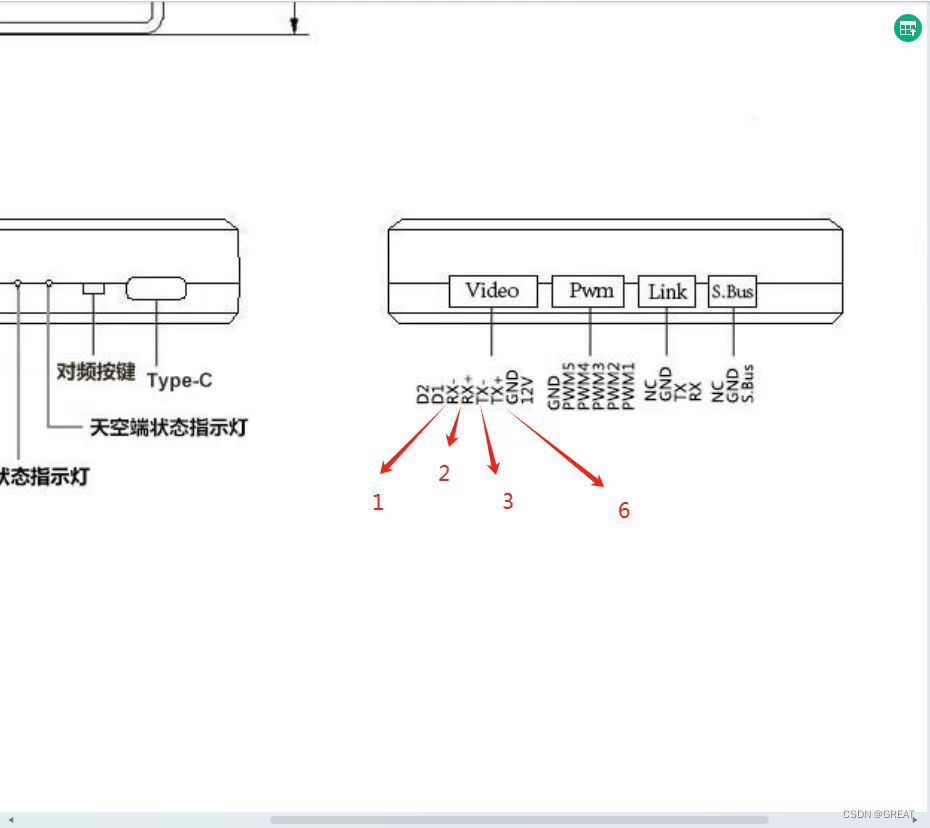
网线改造如下:
2、jetson nano天空端数据采集+检测+保存
无人机上挂载一个jetson nano用于图像采集和实时处理图像,本开发主要是用来做河流分割
将分割的结果保存在jetson nano本地,效果如下:
3、本地回传
1)jetson nano上进行网络配置:
编辑网络连接,更改ipv4地址为自动,等待一会儿即可打开终端输入ifconfig查看网络地址,以太网0接口,eth0。有时候自动连接会失败,那就改为手动,IP地址设置192.168.144.106。
2)将地面端和天空端进行对频,地面端找到bing,连续按下天空端对频键,等待一会儿,地面端和天空端都显示绿灯即为链接成功
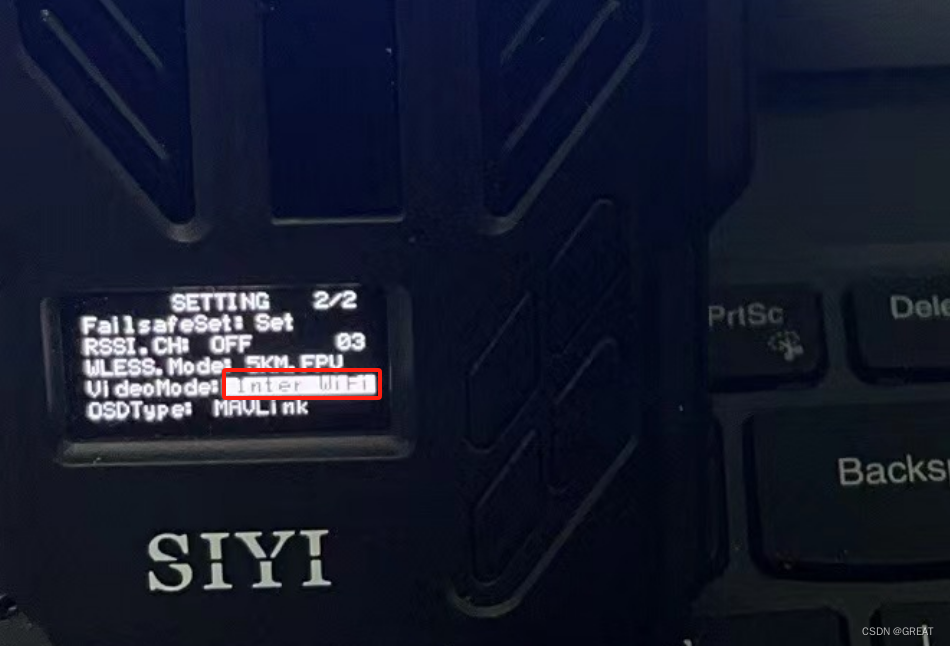
3)地面端设置为VideoMode:Inter Wifi
4)采用wifi与电脑端链接
电脑端找到如下siyi的wifi账号,密码:12345678链接上等待一会儿出现如下效果,证明链接成功
5)电脑端采用vnc Viewer 打开 jetson nano的IP地址:192.168.144.106输入密码,即可登入jetson nano的远程界面
总结:
采用SIYI的HM30的好处是省略了本地和远程网络通信开发,弊端就是需要有大量的资金投入,而且在实验过程中也存在卡顿问题
























![[漏洞复现]Apache_log4j2(CVE-2021-44228)](https://img-blog.csdnimg.cn/direct/3aa2ca51887d4a1fa6297154e2521e91.png)