Task-parameterized Gaussian mixture model (TP-GMM)
对于一组示教数据 ξ ∈ R D × N \bm{ξ} ∈R^{D×N} ξ∈RD×N,从不同的坐标系去观测它
X t ( j ) = A t , j − 1 ( ξ t − b t , j ) X^{(j)}_t=\bm{A}^{-1}_{t,j}(\bm{ξ}_t-\bm{b}_{t,j}) Xt(j)=At,j−1(ξt−bt,j)
上标 j j j 代表坐标系,下标 t t t 代表 示教轨迹数据 ( d a t a p o i n t s ) (datapoints) (datapoints)的索引, A A A 和 b b b 代表坐标系 j j j的姿态描述和位置描述
TP-GMM 形式为有 K K K个 c o m p o n e n t component component 其形式为
{ π i , { μ i j , Σ i ( j ) } j = 1 P } i = 1 K \{ {\pi_i,\{μ_i^{j},Σ^{(j)}_i}\}^P_{j=1}\}^K_{i=1} { πi,{ μij,Σi(j)}j=1P}i=1K
可以看出均值 μ {μ} μ 和 Σ Σ Σ 方差 的维度为 K × P K×P K×P
直接拿不同坐标系数据去训练, 扩张维度, 是不是太生猛一点了
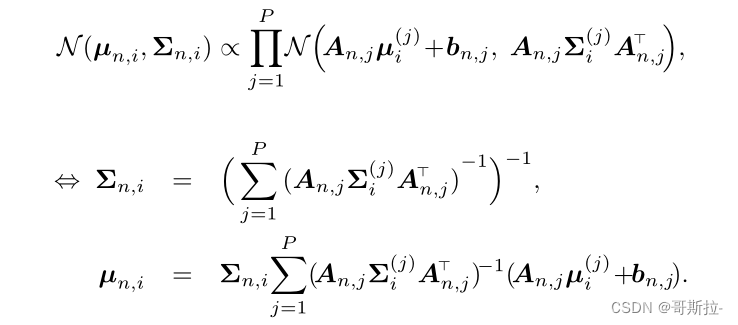
训练完后需要去掉坐标系维度,得到最终的 TP-GMM。论文的做法是,对于每个 c o m p o n e n t component component 存在 P P P 个分布,将这 P P P 个高斯分布相乘,最终得到的结果是:
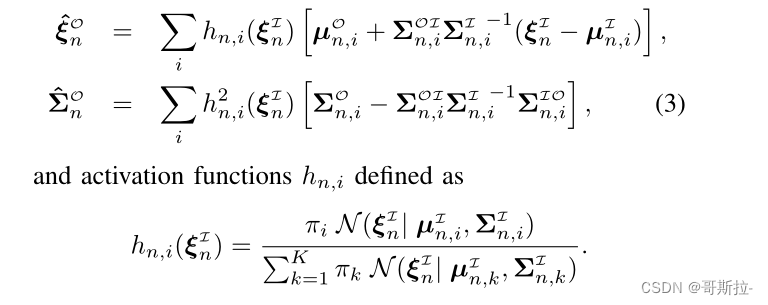
得到最终 T P − G M M TP-GMM TP−GMM 后进行高斯混合回归,对于任务空间中的轨迹数据,上标 I 对应于时间输入维度,O 对应于描述任务空间中路径(位置和方向)的输出维度。n 代表迭代次数, ξ n I ξ_n^I ξnI 和 ξ n o ξ_n^o ξno 代表输入和输出。训练出的TP-GMM模型是输入输出的联合分布,将 TP-GMM 的均值和方差拆成输入输出两部分
GMR依赖该联合分布 P ( ξ n I , ξ n o ) P(ξ_n^I, ξ_n^o ) P(ξnI,ξno) 估计条件概率 P ( ξ n I ∣ ξ n o ) P(ξ_n^I | ξ_n^o ) P(ξnI∣ξno) ,最终的分布为 N ( ξ ^ n O , Σ ^ n O ) N (\hat ξ^O_n, \hatΣ^O_n) N(ξ^nO,Σ^nO)