1 TensorFlow基础
1.1 TensorFlow概要
- TensorFlow使用数据流式图规划计算流程,它可以将计算映射到不同的硬件和操作系统平台。
1.2 TensorFlow编程模型简介
- TensorFlow中的计算可表示为一个有向图(计算图),其中每个运算操作为一个节点,每个节点可有任意多个输入和输出;
- 在计算图的边中流动(flow)的数据被称为张量(tensor),tensor在计算图中flow,故命名为TensorFlow;
- Session是用户使用TensorFlow的交互式接口,可通过Session的Extend方法添加新的节点和边;
- 反复执行计算图时一般的tensor不会被持续保留,Variable中的数据tensor会被保存。
2 TensorFlow和其他深度学习框架的对比
3 TensorFlow第一步
3.1 TensorFlow的编译及安装
3.2 TensorFlow实现Softmax Regression识别手写数字
- 载入MNIST数据集
from tensorflow.examples.tutorials.mnist import input_data import tensorflow as tf mnist = input_data.read_data_sets("Mnist_data/", one_hot=True) - 创建placeholder用以输入数据
x = tf.placeholder(tf.float32, [None, 784]) y_ = tf.placeholder(tf.float32, [None, 784]) #None代表不限条数的输入
- 给模型中的weights和biases创建Variable对象,以存储模型参数(其他的tensor将不保存)
W = tf.Variable(tf.zeros([784, 10])) b = tf.Variable(tf.zeros([10]))
- 构建计算公式
y = softmax(Wx + b)
- 定义Loss,确定优化器
cross_entropy = tf.reduce_mean(-tf.reduce_sum(y_ * tf.log(y), reduction_indices=[1])) train_step = tf.train.GradientDescentOptimizer(0.5).minimize(cross_entropy)
- 初始化变量,执行计算
tf.global_variables_initializer().run() for i in range(1000): batch_xs, batch_ys = mnist.train.next_batch(100) train_step.run({x: batch_xs, y_: batch_ys})
4 TensorFlow实现自编码器及多层感知机
4.1 自编码器简介
- 自编码器,即可以使用自身的高阶特征编码自己;
- 特征的稀疏表达:使用少量的基本特征组合拼装得到更高层抽象的特征;
- 为防止简单的映射,加入几种限制:1. 让中间隐含层节点数量小于输入、输出节点数量,相当于降维 2. 给输入数据加入噪声
4.2 TensorFlow实现自编码器
- 用到xavier参数初始化方法
def xavier_init(fan_in, fan_out, constant = 1): low = - constant * np.sqrt(6.0 / (fan_in + fan_out)) high = constant * np.sqrt(6.0 / (fan_in + fan_out)) return tf.random_uniform((fan_in, fan_out), minval=;ow, maxval=high, dtype=tf.float32)
- 参数初始化函数_initial_weights(创建一个名为all_weights的字典dict,将w1、b1、w2、b2全部存入其中)

def _initialize_weights(self): all_weights = dict() all_weights['w1'] = tf.Variable(xavier_init(self.n_input, self.n_hidden)) all_weights['b1'] = tf.Variable(tf.zeros([self.n_hidden], dtype=tf.float32)) all_weights['w2'] = tf.Variable(xavier_init([self.n_hidden, self.n_input], dtype=tf.float32)) all_weights['b2'] = tf.Variable(tf.zeros([self.n_input], dtype=tf.float32)) return all_weights
4.3 多层感知机简介
- Dropout是在训练时将神经网络某一层的输出节点数据随机丢弃一部分(训练时小于1,预测时等于1),这等于创造出了很多新的随机样本,也算是一种bagging
- Dropout是在训练时将神经网络某一层的输出节点数据随机丢弃一部分(训练时小于1,预测时等于1),这等于创造出了很多新的随机样本,也算是一种bagging
1. 单侧抑制
2. 相对宽阔的兴奋边界
3. 稀疏激活性
4.4 TensorFlow实现多层感知机
- ReLU层的权重可以用截断正态分布进行初始化,偏置可以用一些小的非零值来初始化以避免dead neuron.Sigmoid层的权重和偏置则都初始化为0即可
- 使用ReLU作为隐藏层,并添加dropout,就实现了多层感知机
5 TensorFlow实现卷积神经网络
5.1 卷积神经网络简介
- CNN最初是为解决图像识别问题设计,现在也可用于时间序列信号如音频、文本;
- CNN要点:局部连接、权值共享、池化层降采样
1. 局部连接和权值共享降低了参数量,减轻过拟合
2. 池化层降采样进一步降低输出参数量
- 只要卷积核数量足够多,能提取出各种方向的边或各种形态的点,就可以让采卷积层抽象出有效而丰富的高阶特征;
- CNN参数量只与卷积核尺寸和个数有关
5.2 TensorFlow实现简单的卷积网络
- 首先载入MNIST数据集
- 这个CNN会有很多权重和偏置需要创建,因此先定义初始化函数以便后续重复使用

def weight_variable(shape): initial = tf.truncated_normal(shape, stddev=0.1) return tf.Variable(initial) def bias_variable(shape): initial = tf.constant(0.1, shape=shape) return tf.Variable(initial)
- 卷积层、池化层也需重复使用,这里分别定义创建函数
def conv2d(x, W): return tf.nn.conv2d(x, W, strides=[1, 1, 1, 1], padding='SAME') def max_pool_2x2(x): return tf.nn.max_pool(x, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
- 定义输入:x是特征,y_是真实的label
x = tf.placeholder(tf.float32, [None, 784]) y_ = tf.placeholder(tf.float32, [NOne, 10]) x_image = tf.reshape(x, [-1, 28, 28, 1])
- 第一个卷积层
W_conv1 = weight_variable([5, 5, 1, 32]) b_conv1 = bias_variable([32]) h_conv1 = tf.nn.relu(conv2d(x_image, W_conv1) + b_conv1) h_pool1 = max_pool_2x2(h_conv1)
- 第二个卷积层
W_conv2 = weight_variable([5, 5, 32, 64]) b_conv2 = bias_variable([64]) h_conv2 = tf.nn.relu(conv2d(h_pool1, W_conv2) + b_conv2) h_pool2 = max_pool_2x2(h_conv2)
- 第一个全连接层,后接dropout
W_fc1 = weight_variable([7*7*64, 1024]) b_fc1 = bias_variable([1024]) h_pool2_flat = tf.reshape(h_pool2, [-1, 7*7*64]) h_fc1 = tf.nn.relu(tf.matmul(h_pool2_flat, W_fc1) + b_fc1) keep_prob = tf.placeholder(tf.float32) h_fc1_drop = tf.nn.dropout(h_fc1, keep_prob)
- 第二个全连接层,后接softmax
W_fc2 = weight_variable([1024, 10]) b_fc2 = bias_variable([10]) y_conv = tf.nn.softmax(tf.matmul(h_fc1_drop, W_fc2) + b_fc2)
- 定义损失函数cross entropy,优化器使用Adam,学习速率1e-4
cross_entropy = tf.reduce_mean(-tf.reduce_sum(y_ * tf.log(y_conv), reductioin_indices=[1])) train_step = tf.train.AdamOptimizer(1e-4).minimize(cross_entropy)
- inference完成后,开始训练
tf.global_variables_initializer().run() for i in range(20000): batch = mnist.train.next_batch(50) train_step.run(feed_dict={x: batch[0], y_: batch[1], keep_prob: 0.5})
5.3 TensorFlow实现进阶的卷积网络
- 定义初始化weight函数
1. 这里给weight加一个L2的loss,相当于做了一个L2正则化处理
2. tf.multiply让L2 loss与wl(weight loss)相乘,即用wl控制L2 loss的大小(tf.mutmul矩阵乘法、tf.multiply点乘)
3. 使用tf.add_to_collection把weight loss同意存到名为“losses"的列表中(tf.get_colletion("name")获取列表)
def variable_with_weight_loss(shape, stddev, wl):
var = tf.Variable(tf.truncated_normal(shape, stddev=stddev))
if wl is not None:
weight_loss = tf.multiply(tf.nn.l2_loss(var), wl, name='weight_loss')
tf.add_to_collection('losses', weight_loss)
return var- 第一个卷积层
weight1 = variable_with_weight_loss(shape=[5, 5, 3, 64], stddev=5e-2, wl=0.0) kernel1 = tf.nn.conv2d(image_input, weight1, [1, 1, 1, 1], padding='SAME') bias = tf.Variable(tf.constant(0.0, shape[64])) conv1 = tf.nn.relu(tf.nn.bias_add(kernel1, bias1)) pool1 = tf.nn.max_pool(conv1, ksize=[1, 3, 3, 1], strides=[1, 2, 2, 1], padding='SAME') norm1 = tf.nn.lrn(pool1, 4, bias=1.0, alpha=0.001 / 9.0, beta=0.75) - 数据增强(Data Augmentation):对图片进行翻转、随机剪切,制造更多样本
6 TensorFLow实现经典卷积神经网络
6.1 TensorFlow实现AlexNet
- 使用ReLu,在较深的网络中效果好于Sigmoid,解决了Sigmoid在深层网络中梯度弥散问题
- 使用Dropout,避免模型过拟合
- 提出LRN
- 使用CUDA加速训练
- 数据增强
def inference(images): parameters = [] with tf.nn.name_scope('conv1') as scope: kernel = tf.Variable(tf.truncated_normal([11, 11, 3, 64], dtype=tf.float32, stddev=1e-1), name='weights') conv = tf.nn.con2d(images, kernel, [1, 4, 4, 1], padding='SAME') biases = tf.Variable(tf.constant(0.0, shape=[64], dtype=tf.float32), trainable=True, name='biases') bias = tf.nn.bias_add(conv, biases) conv1 = tf.nn.relu(bias, name=scope) print_activation(conv1) parameters += [kernel, biases] lrn1 = tf.nn.lrn(conv1, 4, bias=1.0, alpha=0.001/9, beta=0.75, name='lrn1') pool1 = tf.nn.max_pool(lrn1, ksize=[1, 3, 3, 1], strides=[1, 2, 2, 1], padding='VALID', name='pool1') print_activations(pool1)6.2 TensorFlow实现VGGNet
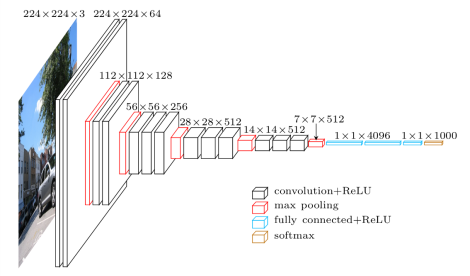
- 卷积核都为3x3,池化层都为2x2
- 3个3x3卷积层串联相当于1个7x7卷积层(感受野相同),参数为后者55%
- 使用数据增强
- vgg16包含很多层,先创建函数conv_op、fc_op和mpool_op
def conv_op(input_op, name, kh, kw, n_out, dh, dw, p): n_in = input_op.get_shape()[-1].value with tf.name_scope(name) as scope: kernel = tf.get_variable(scope+"w", shape=[kh, kw, n_in, n_out], dtype=tf.float32, initializer=tf.contrib.layers.xavier_initializer_conv2d()) conv = tf.nn.conv2d(input_op, kernel, (1, dh, dw, 1), padding='SAME') bias_init_val = tf.constant(0.0, shape=[n_out], dtype=tf.float32) biases = tf.Variable(bias_init_val, trainable=True, name='b') z = tf.nn.bias_add(conv, biases) activation = tf.nn.relu(z, name=scope) p += [kernel, biases] return activation def fc_op(input_op, name, n_out, p): n_in = input_op.get_shape()[-1].value with tf.name_scope(name) as scope: kernel = tf.get_variable(scope+"w", shape=[n_in, n_out], dtype=tf.float32, initializer=tf.contrib.layers.xavier_initializer()) biases = tf.Variable(tf.constant(0.1, shape=[n_out], dtype=tf.float32), name='b') activation = tf.nn.relu_layer(input_op, kernel, biases, name=scope) p += [kernel, biases] return activation def mpool_op(input_op, name, kh, kw, dh, dw): return tf.nn.max_pool(input_op, ksize=[1, kh, kw, 1], strides=[1, dh, dw, 1], padding='SAME', name=name)
- 完成创建函数,开始构建VGG16网络结构
def inference_op(input_op, keep_prob): p = [] conv1_1 = conv_op(input_op, name="conv1_1", kh=3, kw=3, n_out=64, dh=1, dw=1, p=p) conv1_2 = conv_op(conv1_1, name="conv1_2", kh=3,pool1",w=3, n_out=64, dh=1, dw=1, p=p) pool1 = mpool_op(conv1_2, name="pool1", kh=2, kw=2, dw=2, dh=2) ...
6.3 TensorFlow实现Google Inception Net
- Inception V1去除最后的全连接层,用全局平均池化层代替。(模型训练更快且减轻了过拟合)
- 1x1卷积可以跨通道组织信息,提高网络表达能力,且可以对输出通道升维、降维
- 1x1卷积的性价比很高,用很小的计算量就能增加一层特征变化和非线性化
- 1x1卷积可很自然地把相关性很高的、在同一个空间位置但是不同通道的特征连接在一起
- 靠后的Inception Module中大面积的卷积核占比更多,以捕捉更高阶的抽象特征
- 用到辅助分类节点(auxiliary classifiers),在Inception Net中间一层的输出用作分类,并按一个较小权重(0.3)加到最终分类结果中
- Inception V2提出了Batch Normalization
- 定义inception_v3_arg_scope用来生成网络中经常用到的函数的默认参数
def inception_v3_arg_scope(weight_decay=0.00004, stddev=0.1, batch_norm_var_collectioin='moving_vars'): batch_norm_params = { 'decay': 0.9997, 'epsilon': 0.001, 'updates_collections': tf.GraphKeys.UPDATE_OPS, 'variables_collections': { 'beta': None, 'gamma': None, 'moving_mean': [batch_norm_var_collectioin], 'moving_variance': [batch_norm_var_collection], } } with slim.arg_scope([slim.conv2d, slim.fully_connected], weights_regularizer=slim.l2_regularizer(weight_decay)): with slim.arg_scope([slim.conv2d], weights_initializer=tf.truncated_normal_initializer(stddev=stddev), activation_fn=tf.nn.relu, normalizer_fn=slim.batch_norm, normalizer_params=batch_norm_params) as sc: return sc - 定义inception_v3_base用来生成Inception V3网络的卷积部分
def inception_v3_base(inputs, scope=None): end_points = {} with tf.variable_scope(scope, 'InceptionV3', [inputs]): #前面的卷积层 with slim.arg_scope([slim.conv2d, slim.max_pool2d, slim.avg_pool2d], stride=1, padding='VALID'): net = slim.conv2d(inputs, 32, [3, 3], stride=2, scope='Conv2d_1a_3x3') net = slim.conv2d(net, 32, [3, 3], scope='Conv2d_2a_3x3') ... #接着是三个Inception #inception 1 with slim.arg_scope([slim.conv2d, slim.max_pool2d, slim.avg_pool2d], stride=1, padding='SAME'): #inception 1中的第一个inception module with tf.variable_scope('Mixed_5b'): with tf.variable_scope('Branch_0'): branch_0 = slim.conv2d(net, 64, [1, 1], scope='Conv2d_0a_1x1') with tf.variable_scope('Branch_1'): branch_1 = slim.conv2d(net, 48, [1, 1], scope='Conv2d_0a_1x1') branch_1 = slim.conv2d(branch_1, 64, [5, 5], scope='Conv2d_0b_5x5') ...6.4 TensorFlow实现ResNet
- ResNet的残差学习单元(Residual Unit)不再学习一个完整的输出H(x),而是学习残差H(x)-x.ResNet有很多支线将输入直接连到后面的层,使得后面的层可以直接学习残差,这种结构被称为shortcut
- 两层的残差学习单元包含两个相同输出通道数的3x3卷积,三层的残差学习单元则是1x1卷积,3x3卷积,1x1卷积,并且先降维再升维