事件相机角点检测:从原理到演示编程
角点检测是计算机视觉中一项重要的任务,可用于在图像或视频中定位和跟踪角点。本文将介绍角点检测的原理,并提供一个简单的演示编程示例。
原理
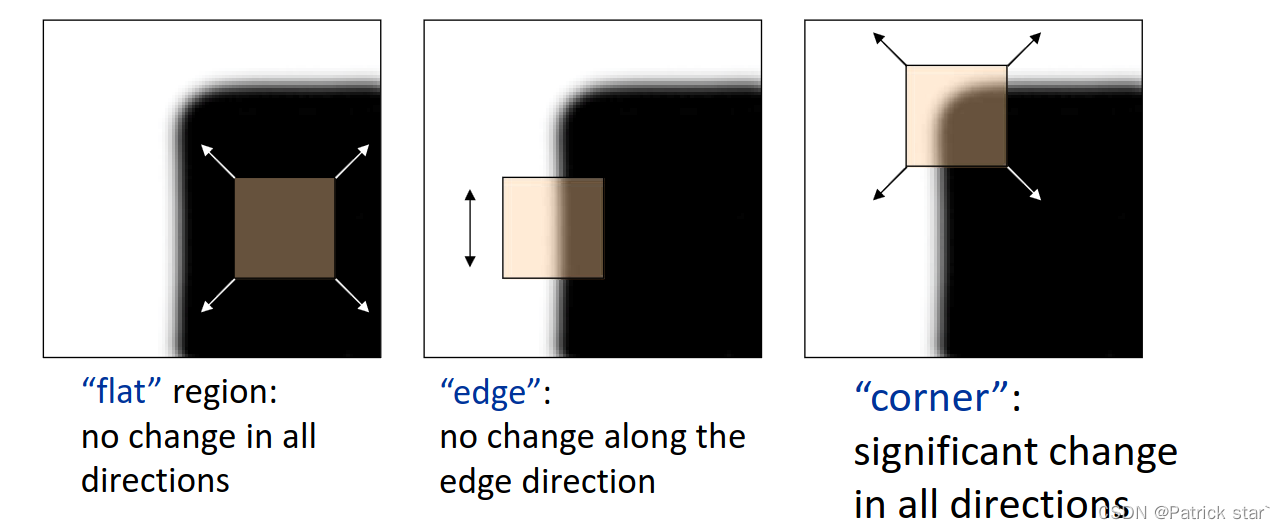
角点是图像中的显著特征点,其具有以下两个主要特征:
- 角点周围的像素在不同方向上具有较大的灰度变化。
- 角点周围的像素在不同方向上的梯度都比较大。
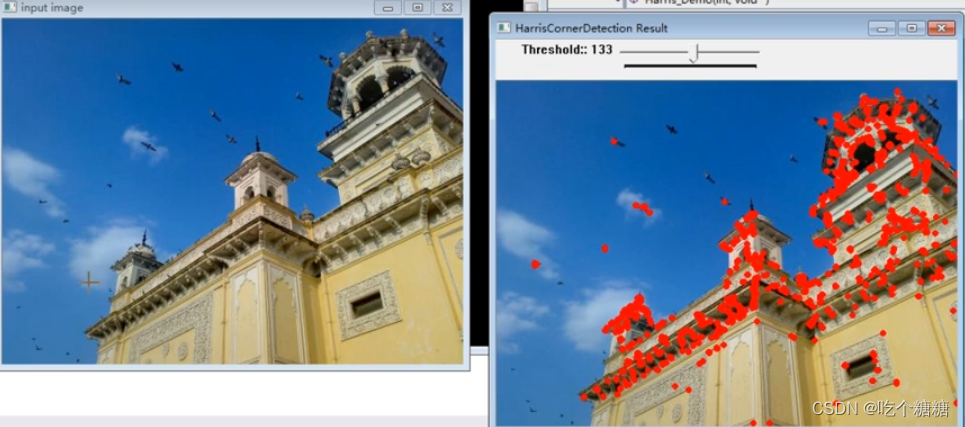
基于这些特征,我们可以使用各种算法来进行角点检测。其中,Harris 角点检测算法是最常用和经典的方法之一。该算法通过计算图像中每个像素的角点响应函数来确定角点的位置。
Harris 角点响应函数的计算过程如下:
- 对图像进行灰度转换(如果图像不是灰度图像)。
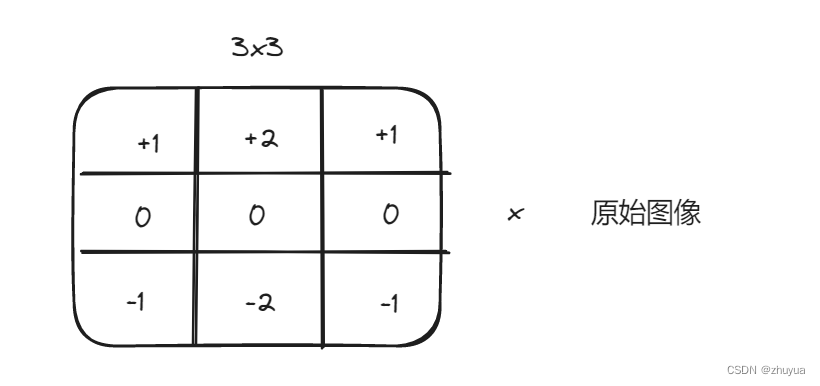
- 计算每个像素的梯度。
- 计算每个像素的自相关矩阵(M)。
- 计算每个像素的角点响应函数(R)。
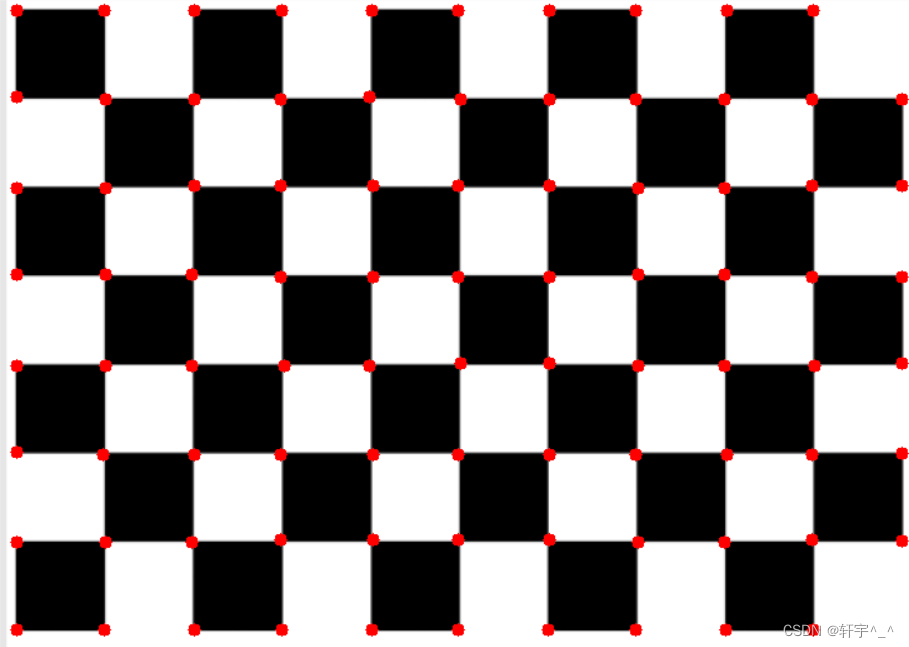
- 应用非极大值抑制(NMS)来选择最显著的角点。
在计算角点响应函数时,我们可以使用以下公式:
R = det(M) - k * trace(M)^2
其中,det(M) 是 M 的行列式,trace(M) 是 M 的迹,k 是一个经验参数,用于控制角点的敏感性。
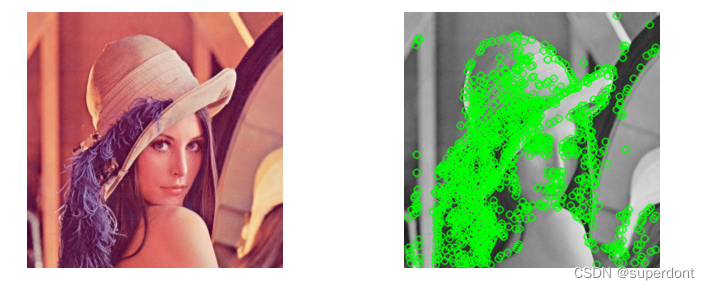
演示编程
下面是一个使用 Python 和 OpenCV 库实现的简单角点检测演示程序:
import cv2
import<