#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
文章目录
前言
计算机视觉识别常见的任务类型有:目标分类、目标检测、语义分割、实例分割和全景分割等。
分类
分类(Classification)是图片级别的任务,识别图片中的物体类别,示例如下。

目标检测
目标检测(Object Detection)是物体级别的任务,识别物体类别,同时用BoundingBox来表示物体的位置,示例如下。2D目标检测的算法有YOLO系列、RCNN系列等。3D目标检测的算法有SMOKE、FCOS3D等。

语义分割
语义分割(Semantic Segmentation)是像素级别的任务,识别物体类别(不区分个体),示例如下。自动驾驶中用到的算法有freespace,其他领域用到的算法有FCN、UNet、Enet等。

实例分割
实例分割(Instance Segmentation)是像素级别的任务,包含了目标检测和语义分割,可区分个体,示例如下。常用的算法有MaskRCNN、自动驾驶车道线检测SCNN、PINet等。

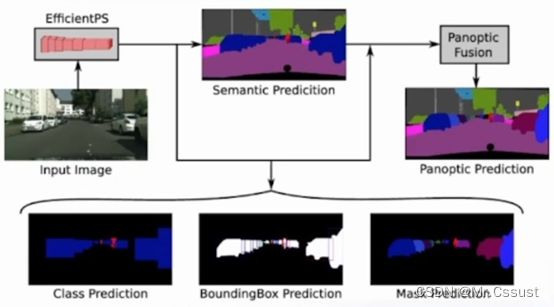
全景分割
全景分割(Panoptic segmentation),是未来的一种研究方向,是像素级别的任务,包含语义标签和实例ID,可数目标和不可数目标都可以应对,示例如下。
总结
以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
文中部分图片来源自网络,若有侵权,联系立删。