在使用stm32c8t6单片机时,由于需要使用两个串口usart1 、usart2。usart1用作程序烧录、调试作用,串口2用于与其它模块进行通信。
使用串口1时,正常工作,使用串口2时,无反应。查阅了相关资料串口2在PA2\PA3 引脚上。RX\TX正反插无反应。最终找出原因是程序配置出现问题,但编译是没有报错的。
下面是我个人发现的问题
问题程序:
void USART2_Init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//串口2在APB1时钟线上 **********************没开其APB1的时钟*********
/* 配置GPIO的模式和IO口 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_2;//TX //串口输出PA2
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化串口输入IO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;//RX //串口输入PA3
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //模拟输入
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
//USART2 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口1
USART_Cmd(USART2, ENABLE); //使能串口2
USART_ClearFlag(USART2, USART_FLAG_TC);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//使能接收中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//Usart2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}修正程序:
void USART2_Init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//串口2在APB1时钟线上 **********************没开其APB1的时钟*********
/* 配置GPIO的模式和IO口 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_2;//TX //串口输出PA2
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化串口输入IO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;//RX //串口输入PA3
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //模拟输入
GPIO_Init(GPIOA,&GPIO_InitStructure); /* 初始化GPIO */
//USART2 初始化设置
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART2, &USART_InitStructure); //初始化串口1
USART_Cmd(USART2, ENABLE); //使能串口2
USART_ClearFlag(USART2, USART_FLAG_TC);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//使能接收中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//Usart2 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;//串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
经过对比发现,问题出现在时钟配置上。
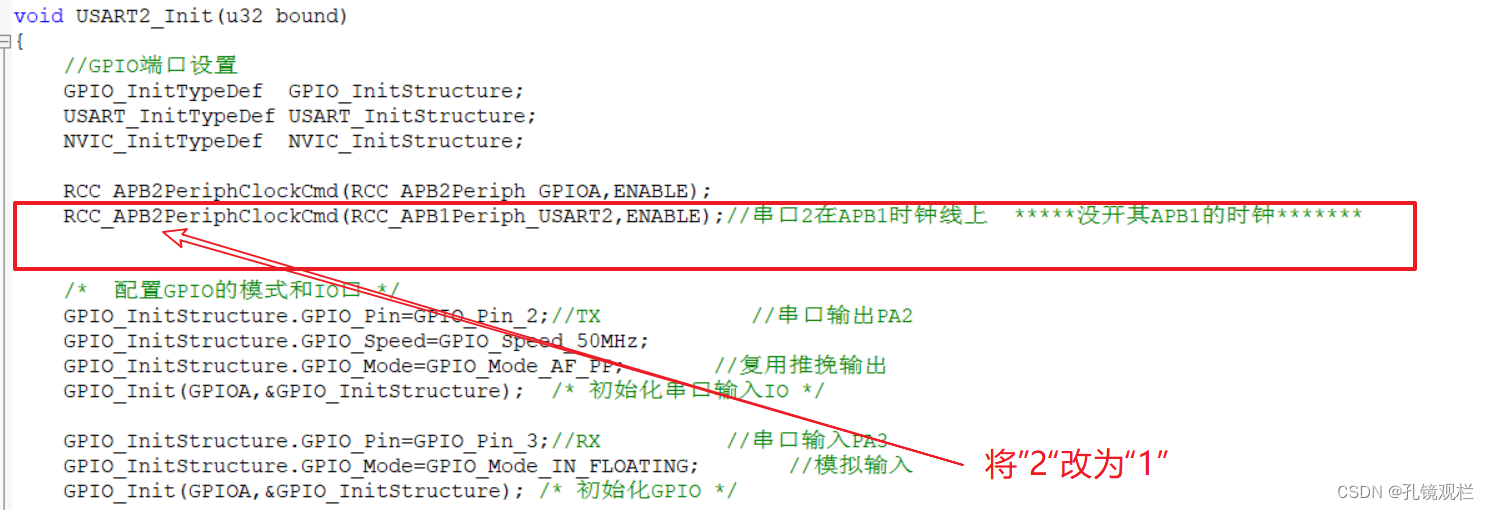
分析如下:
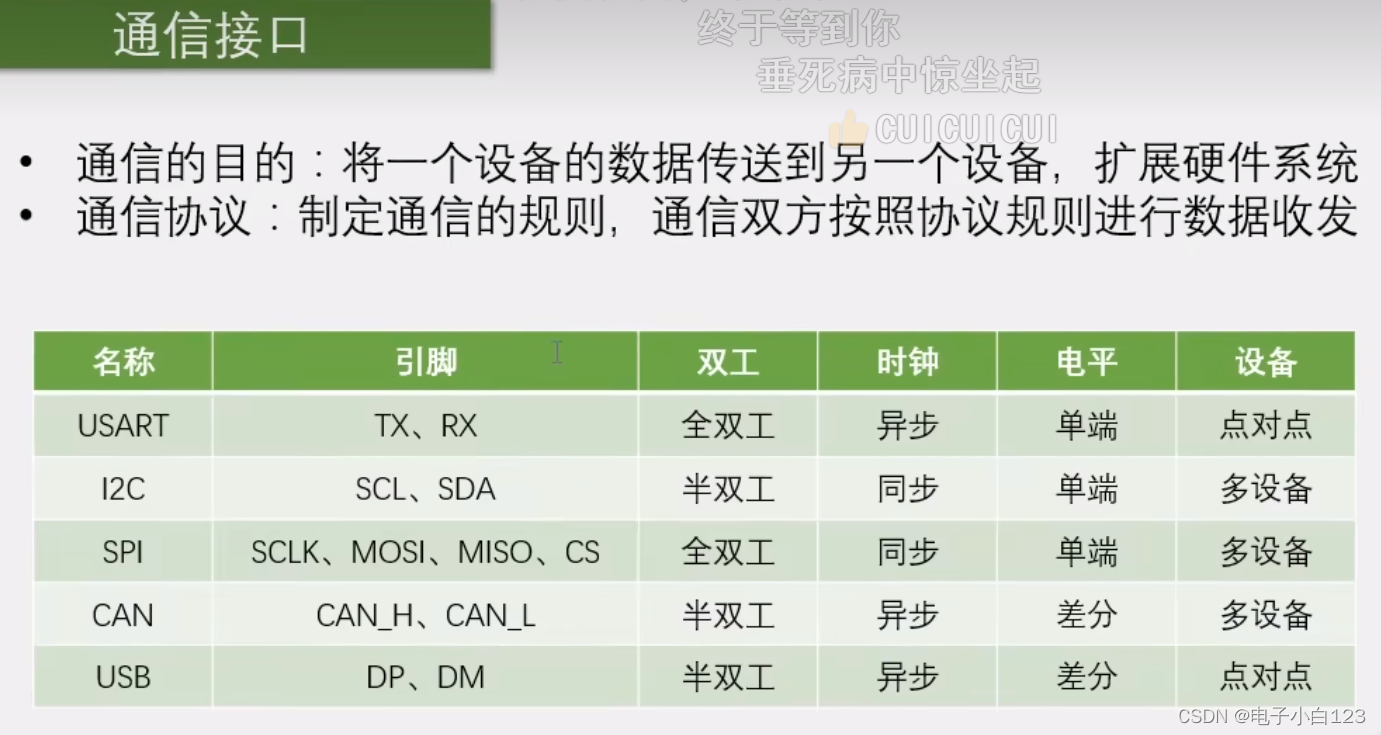
1、usart2在APB1总线上,而不是APB2。
2、usart2的时钟开启函数应为RCC_APB1PeriphClockCmd()。而不是RCC_APB2PeriphClockCmd()。
没有开串口2时钟,相当于人没有了心脏,当然无法正常工作。
所以在复制或借用他人工程时,一定要检查。