1. 安装ROS Qt Creator Plug-in
首先安装ROS Qt Creator Plug-in,这其实是一个带有ROS插件的Qt Creator:去下面的网址https://ros-qtc-plugin.readthedocs.io/en/latest/_source/How-to-Install-Users.html#qt-installer-procedure,根据自己的ubuntu版本选择对应的下载版本,有在线安装和离线安装两种安装方式,以18.04为例:
选择在线安装,会下载一个名叫eator-ros-bionic-latest-online-installer.run的run文件,对其鼠标右键->属性->权限->允许作为程序执行文件,然后双击安装,组件全选,等待安装完成。
2. 在Qt Creator创建ROS节点
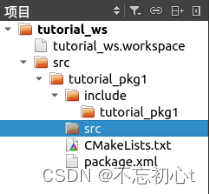
然后打开Qt Creator,新建项目->其他项目->ROS Workspace->选择->输入name(tutorial_ws),Build System选catkin_make,路径自己选择->完成,此时的文件结构如下图:
在这里插入图片描述
如果src没显示,则点上面的图标在这里插入图片描述
,选项全都取消勾选。这个时候就已经创建好了一个工作空间,然后右键src->Add New->ROS->Package->choose->输入name(tutorial_pkg1),路径选择该项目下的src文件夹,Dependencies_Catkin根据需要填依赖,一般需要roscpp、std_msgs等->下一步、完成。
此时已经在项目下创建了一个包,这时如果左边文件没有显示,则把项目关闭再打开