任务的挂起与恢复的API函数

挂起 - vTaskSuspend
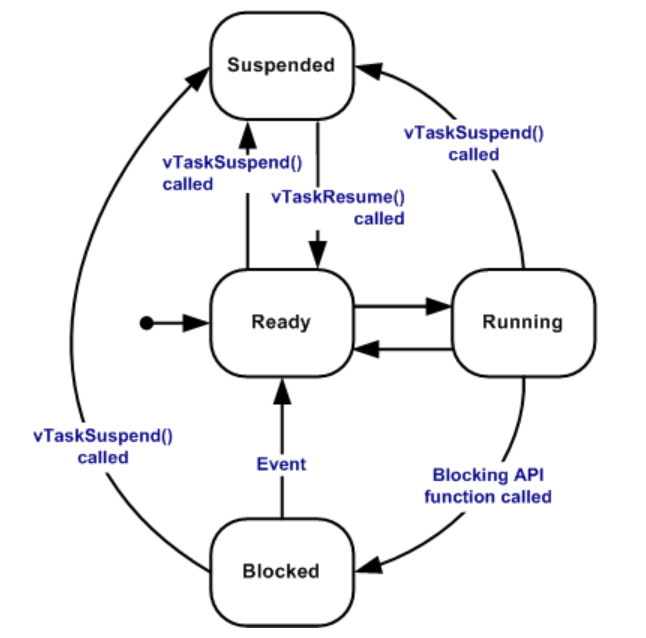
挂起任务类似暂停,可恢复; 删除任务,无法恢复,类似“人死两清”
使用
必须将 INCLUDE_vTaskSuspend 定义为 1 才能使用此函数
void vTaskSuspend( TaskHandle_t xTaskToSuspend );
//xTaskToSuspend 被挂起的任务句柄。传递空句柄将导致调用任务被暂停对 vTaskSuspend 的调用不会累积次数,例如:若在同一任务上调用 vTaskSuspend () 两次,将仍然仅需调用一次 vTaskResume (),即可准备完毕暂停的任务。
恢复 - vTaskResume
恢复被挂起的任务
使用
必须将 INCLUDE_vTaskSuspend 定义为 1 才能使用此函数。
void vTaskResume( TaskHandle_t xTaskToResume );
//xTaskToResume 要恢复的任务句柄由一次或多次调用 vTaskSuspend () 而挂起的任务可通过单次调用 vTaskResume () 重新运行。
代码
因为只有部分改动,所以只使用了改动的部分,完整代码请看我上一篇
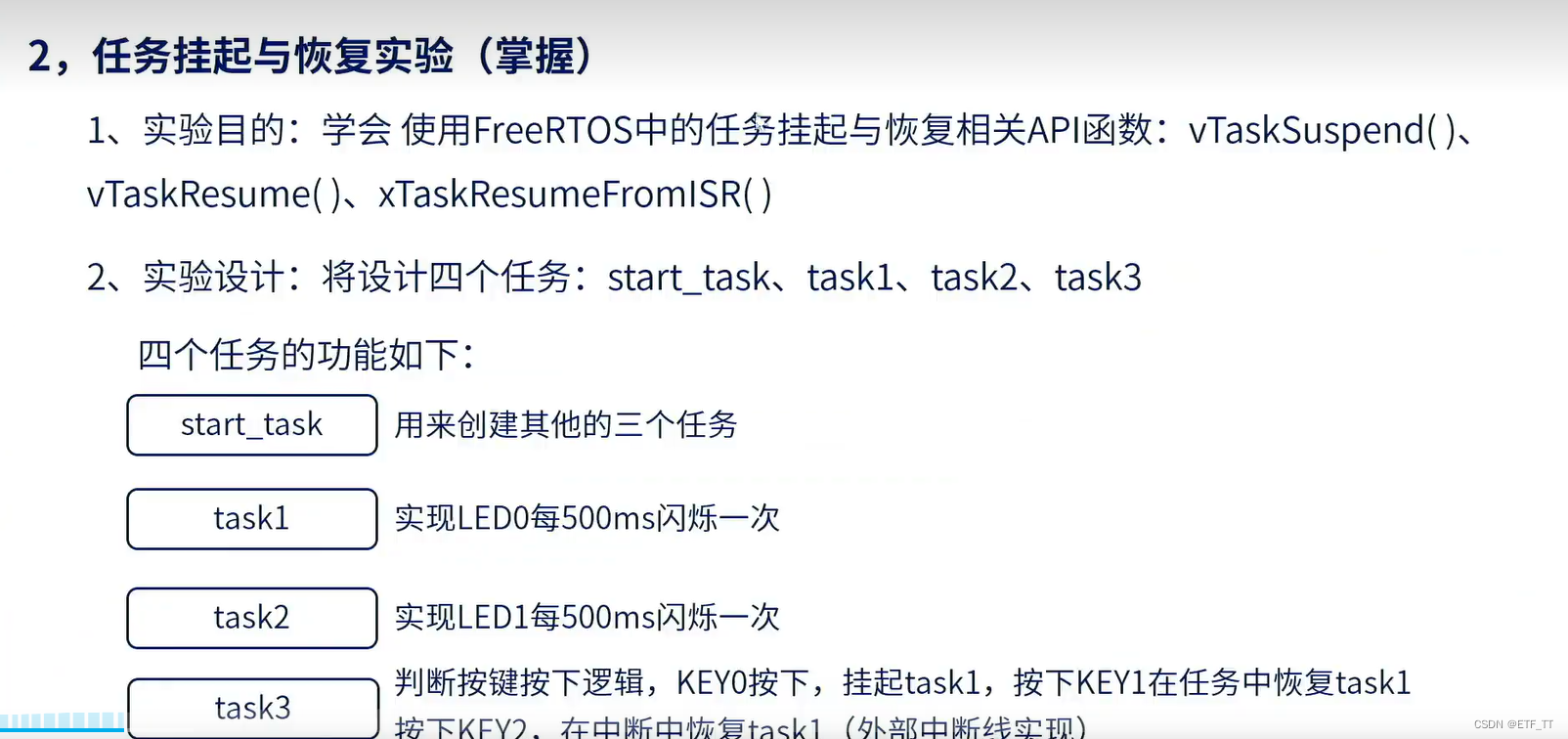
- start_task 任务,用于创建其他3 个任务。
- KEY1 被按下,调用函数vTaskSuspend()挂起任务1。
- KEY2 被按下,调用函数vTaskResume()恢复任务1 的运行。
- 任务1 的任务函数,用于观察任务挂起和恢复的过程。
//LED0闪烁500ms
void task1(void * pvParameters)
{
uint32_t task1_num = 0;
while(1)
{
printf("task1_num:%d\r\n",++task1_num);
LED0_TOGGLE();
vTaskDelay(500);
}
}
//LED1闪烁500ms
void task2(void * pvParameters)
{
uint32_t task2_num = 0;
while(1)
{
printf("task2_num:%d\r\n",++task2_num);
LED1_TOGGLE();
vTaskDelay(500);
}
}
//按下KEY0挂起LED0任务,按下KEY1恢复LED0任务
void task3(void * pvParameters)
{
uint8_t key = 0;
while(1)
{
key = key_scan(0);
if (key == KEY0_PRES)
{
printf("挂起task1\r\n");
vTaskSuspend(task1_handler);
}
else if (key == KEY1_PRES)
{
vTaskResume(task1_handler);
printf("在任务中恢复task1\r\n");
vTaskDelay(10);
}
}
在中断中恢复 - xTaskResumeFromISR
带FromISR后缀是在中断函数中专用的API函数
使用
必须将 INCLUDE_vTaskSuspend 和 INCLUDE_xTaskResumeFromISR 定义为 1 才能使用此函数。
由多次调用 vTaskSuspend() 中的一次调用挂起的任务可通过单次调用 xTaskResumeFromISR() 重新运行
xTaskResumeFromISR() 通常被视为危险函数,因为其 操作未被锁定。 因此,如果中断可能在任务被挂起之前到达, 从而中断丢失, 则绝对不应使用该函数 来同步任务与中断。 可使用信号量, 或者最好是直达任务通知,来避免这种可能性。
BaseType_t xTaskResumeFromISR( TaskHandle_t xTaskToResume );
//xTaskToResume 要恢复的任务句柄。
//注意有返回值返回:
如果恢复任务导致上下文切换,则返回 pdTRUE,否则返回 pdFALSE。
ISR 使用此信息来确定 ISR 之后是否需要上下文切换。
代码
/************************************************************************/
中断EXTI.c中
/************************************************************************/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
delay_ms(20); /* 消抖 */
switch(GPIO_Pin)
{
BaseType_t A; //定义一个变量接收返回值
case WKUP_INT_GPIO_PIN:
if (WK_UP == 1)
{
A = xTaskResumeFromISR(task1_handler);
printf("在中断中恢复task1\r\n");
}
if (A == pdTRUE)
{
portYIELD_FROM_ISR(A);
}
break;
}
}
中断恢复注意事项
一、抢占优先级
/* Priority grouping: The interrupt controller (NVIC) allows the bits
* that define each interrupt's priority to be split between bits that
* define the interrupt's pre-emption priority bits and bits that define
* the interrupt's sub-priority. For simplicity all bits must be defined
* to be pre-emption priority bits. The following assertion will fail if
* this is not the case (if some bits represent a sub-priority).
*
* If the application only uses CMSIS libraries for interrupt
* configuration then the correct setting can be achieved on all Cortex-M
* devices by calling NVIC_SetPriorityGrouping( 0 ); before starting the
* scheduler. Note however that some vendor specific peripheral libraries
* assume a non-zero priority group setting, in which cases using a value
* of zero will result in unpredictable behaviour.
*/
configASSERT( ( portAIRCR_REG & portPRIORITY_GROUP_MASK ) <= ulMaxPRIGROUPValue );上面的意思是: 优先级分组要求所有位用作抢占式,而不能用作子优先级
使用 RTOS 时的相关性
建议将所有优先级位都指定为抢占优先级位, 不保留任何优先级位作为子优先级位。 任何其他配置都会 使 configMAX_SYSCALL_interrupt_PRIORITY 设置与 分配给各个外设中断之间的直接关系复杂化。
大多数系统的默认配置都是所需要的, STM32 驱动器库除外。 如果您使用 STM32 和 STM32 驱动器库, 请通过 调用 NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 ) 来确保所有优先级位都被指定为抢占优先级位,这一步需要 在启动 RTOS 前完成。

二、中断优先级
/* Is the interrupt number a user defined interrupt? */
if( ulCurrentInterrupt >= portFIRST_USER_INTERRUPT_NUMBER )
{
//Look up the interrupt's priority.
ucCurrentPriority = pcInterruptPriorityRegisters[ ulCurrentInterrupt ];
/* The following assertion will fail if a service routine (ISR) for
* an interrupt that has been assigned a priority above
* configMAX_SYSCALL_INTERRUPT_PRIORITY calls an ISR safe FreeRTOS API
* function. ISR safe FreeRTOS API functions must *only* be called
* from interrupts that have been assigned a priority at or below
* configMAX_SYSCALL_INTERRUPT_PRIORITY.
*
* Numerically low interrupt priority numbers represent logically high
* interrupt priorities, therefore the priority of the interrupt must
* be set to a value equal to or numerically *higher* than
* configMAX_SYSCALL_INTERRUPT_PRIORITY.
*
* Interrupts that use the FreeRTOS API must not be left at their
* default priority of zero as that is the highest possible priority,
* which is guaranteed to be above configMAX_SYSCALL_INTERRUPT_PRIORITY,
* and therefore also guaranteed to be invalid.
*
* FreeRTOS maintains separate thread and ISR API functions to ensure
* interrupt entry is as fast and simple as possible.
*
* The following links provide detailed information:
* https://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html
* https://www.FreeRTOS.org/FAQHelp.html
*/
configASSERT( ucCurrentPriority >= ucMaxSysCallPriority );
}使用 RTOS 时的相关性
以 "FromISR" 结尾的 FreeRTOS 函数是中断安全的,但前提是 调用这些函数的中断的逻辑优先级不高于 configMAX_SYSCALL_INTERRUPT_PRIORITY 定义的优先级(configMAX_SYSCALL_INTERRUPT_PRIORITY 在 FreeRTOSConfig.h 头文件中定义)。 因此,对于任何使用一个 RTOS API 函数的中断服务程序, 必须为其手动设置为一个数值优先级, 这个值必须等于或大于 configMAX_SYSCALL_INTERRUPT_PRIORITY 设定 的值。 这确保了中断的逻辑优先级等于或小于 configMAX_SYSCALL_INTRUPT_PRIORITY 设置。
Cortex-M 中断的默认数值优先级为 0。 0 是最高的 优先级。 因此,切勿将使用中断安全 RTOS API 的中断的优先级 保留为其默认值。

因此中断优先级的范围就应该是 5 - 15。































![[附开题]flask框架的基于web的外卖程序的设计与实现zce6e(python+源码)](https://i-blog.csdnimg.cn/direct/391e68338f4d4e1b8f955461dca4a4dc.png)