文章目录
NMPC轨迹跟踪控制器推导及Simulink验证
NMPC与MPC的不同特点
MPC(模型预测控制):
- 线性或线性化模型:MPC通常基于线性系统模型,或者将非线性系统模型在工作点附近进行线性化处理。
- 优化问题:在每一个控制周期内,MPC解决一个线性规划或二次规划问题,以优化未来的控制行为。
- 适用范围:适用于线性系统或者可以在操作点附近线性化的非线性系统。
- 计算复杂度:相对较低,因为优化问题相对简单。
NMPC(非线性模型预测控制):
- 非线性模型:NMPC直接使用非线性系统模型,不进行线性化处理。
- 优化问题:在每一个控制周期内,NMPC解决一个非线性规划问题,这通常比线性或二次规划问题更复杂。
- 适用范围:适用于非线性系统,尤其是当线性化处理无法准确描述系统动态时。
- 计算复杂度:相对较高,因为非线性优化问题通常更难求解。
NMPC轨迹跟踪控制器推导
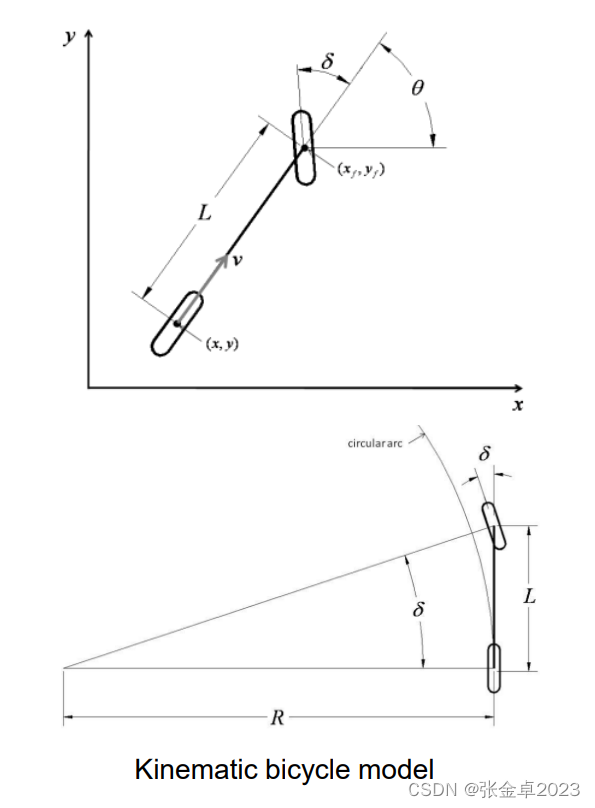
一 系统模型建立
将非线性系统表述如下:
X ˙ = f ( X , u ) \dot{X} = f(X,u) X˙=f(X,u)
二 预测区间状态和变量推导
采用4阶Runge-Kutta方法对系统状态变量进行预测:
针对非线性微分方程 X ˙ = f ( X , u ) \dot{X} = f(X,u) X˙=f(X,u),以时间间隔 Δ t \Delta{t} Δt进行数值求解:
{ k 1 = f ( X t , u t ) k 2 = f ( X t + k 1 Δ t 2 , u t ) k 3 = f ( X t + k 2 Δ t 2 , u t ) k 4 = f ( X t + k 3 Δ t , u t ) X t + 1 = X t + ( k 1 + 2 k 2 + 2 k 3 + k 4 ) Δ t 6 \left\{ \begin{aligned} k_1 & = f(X_t,u_t)\\ k_2 & = f(X_t+k_1\frac{\Delta{t}}{2},u_t)\\ k_3 & = f(X_t+k_2\frac{\Delta{t}}{2},u_t)\\ k_4 & = f(X_t+k_3\Delta{t},u_t)\\ X_{t+1} & = X_t + (k_1+2k_2+2k_3+k_4)\frac{\Delta{t}}{6}\\ \end{aligned} \right. ⎩ ⎨ ⎧k1k2k3k4Xt+1=f(Xt,ut)=f(Xt+k12Δt,ut)=f(Xt+k22Δt,ut)=f(Xt+k3Δt,ut)=Xt+(k1+2k2+2k3+k4)6Δt
三 代价函数推导
定义代价函数为阶段成本和最终成本之和:
J = ∫ t t + N Δ t L ( X ( τ ) , u ( τ ) ) d τ + V ( X ( t + N Δ t ) ) J = \int_{t}^{t+N\Delta{t}}L(X(\tau),u(\tau))d\tau + V(X(t+N\Delta{t})) J=∫tt+NΔtL(X(τ),u(τ))dτ+V(X(t+NΔt))
其中, N N N为预测步长, L 、 V L、V L、V分别为阶段成本和最终成本函数。
定义阶段成本函数为:
L ( X ( τ ) , u ( τ ) ) = ( X ( τ ) − R e f ( τ ) ) T Q ( X ( τ ) − R e f ( τ ) ) + u ( τ ) T R u ( τ ) L(X(\tau),u(\tau)) = (X(\tau)-R_{ef}(\tau))^TQ(X(\tau)-R_{ef}(\tau)) + u(\tau)^TRu(\tau) L(X(τ),u(τ))=(X(τ)−Ref(τ))TQ(X(τ)−Ref(τ))+u(τ)TRu(τ)
包含位置误差成本和控制输入成本两部分。
最终成本函数为:
V ( X ( t + N Δ t ) ) = X ( t + N Δ t ) T F X ( t + N Δ t ) V(X(t+N\Delta{t}) )= X(t+N\Delta{t})^TFX(t+N\Delta{t}) V(X(t+NΔt))=X(t+NΔt)TFX(t+NΔt)
为最终误差成本。
四 优化求解
通过3. 代价函数推导,采用内点优化方法使得代价 J J J最小,进而进行控制,定义优化问题如下:
min u k J = ∫ t t + N Δ t L ( X ( τ ) , u ( τ ) ) d τ + V ( X ( t + N Δ t ) ) subject to u m i n ≤ u ( τ ) ≤ u m a x \begin{aligned} \underset{u_k}\min \quad & J = \int_{t}^{t+N\Delta{t}}L(X(\tau),u(\tau))d\tau + V(X(t+N\Delta{t})) \\ \text{subject to}\quad & u_{min}\leq u(\tau) \leq u_{max}\\ \end{aligned} ukminsubject toJ=∫tt+NΔtL(X(τ),u(τ))dτ+V(X(t+NΔt))umin≤u(τ)≤umax
在MATLAB中可使用函数fmincon(fmincon函数介绍)求解:
根据MATLAB中quadprog要求,定义:
{ f u n = J A = [ ] b = [ ] A e q = [ ] b e q = [ ] l b = u m i n u b = u m a x \left\{ \begin{aligned} fun & = J \\ A & = [\quad]\\ b & = [\quad]\\ A_{eq} & = [\quad]\\ b_{eq} & = [\quad]\\ lb & = u_{min}\\ ub & = u_{max}\\ \end{aligned} \right. ⎩
⎨
⎧funAbAeqbeqlbub=J=[]=[]=[]=[]=umin=umax
调用 fmincon(fun,A,b,Aeq,beq,lb,ub) 即可求解代价函数 J J J取最小值时,最优控制输入 u k u_k uk。
基于MPC的倒立摆控制系统
采用这篇文章建立的倒立摆模型进行仿真测试。
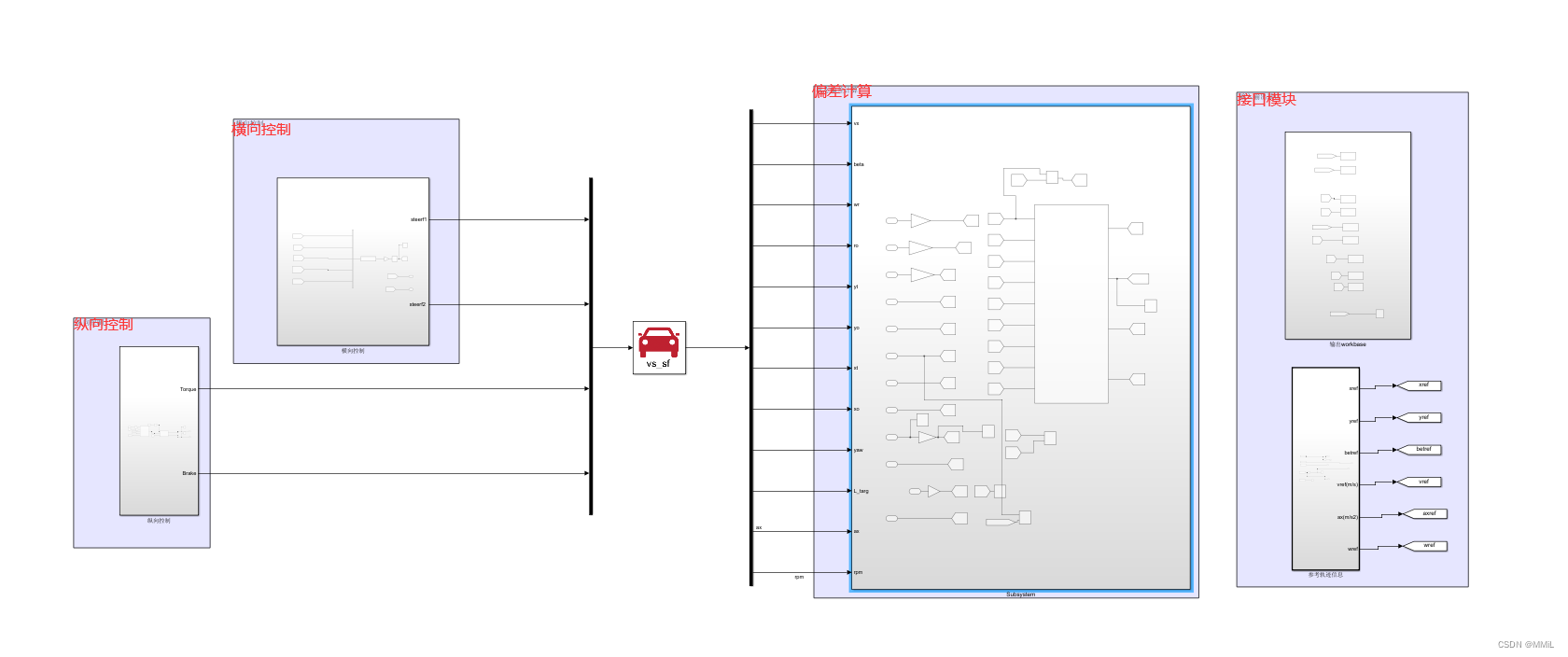
在simulink中搭建控制仿真模型如下:

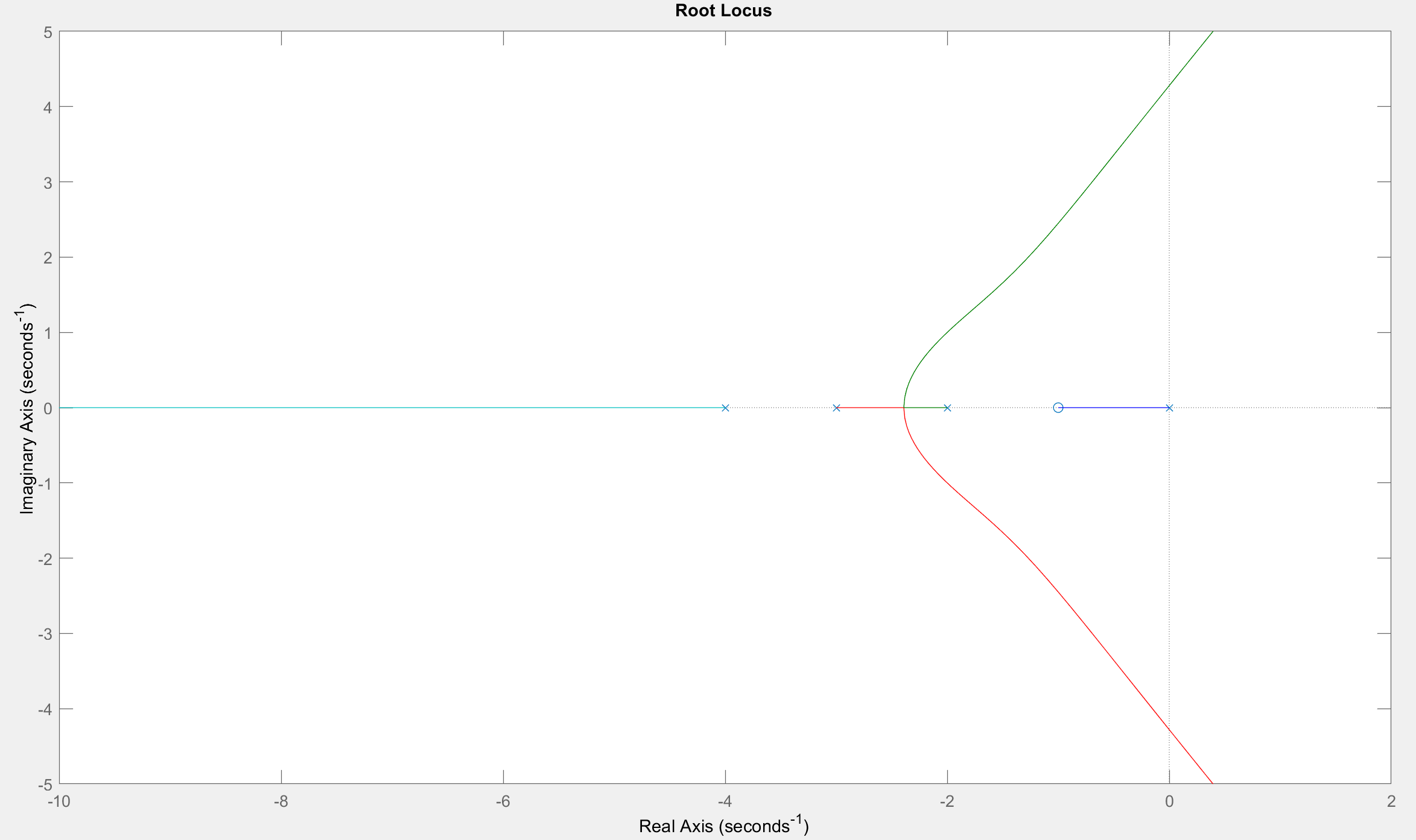
输入计算出的反馈增益 K K K仿真结果如下:

相关资料
MATLAB代码和simulink模型点击这里
MPC控制器推导及Simulink验证点击这里
欢迎大家与我交流!!!