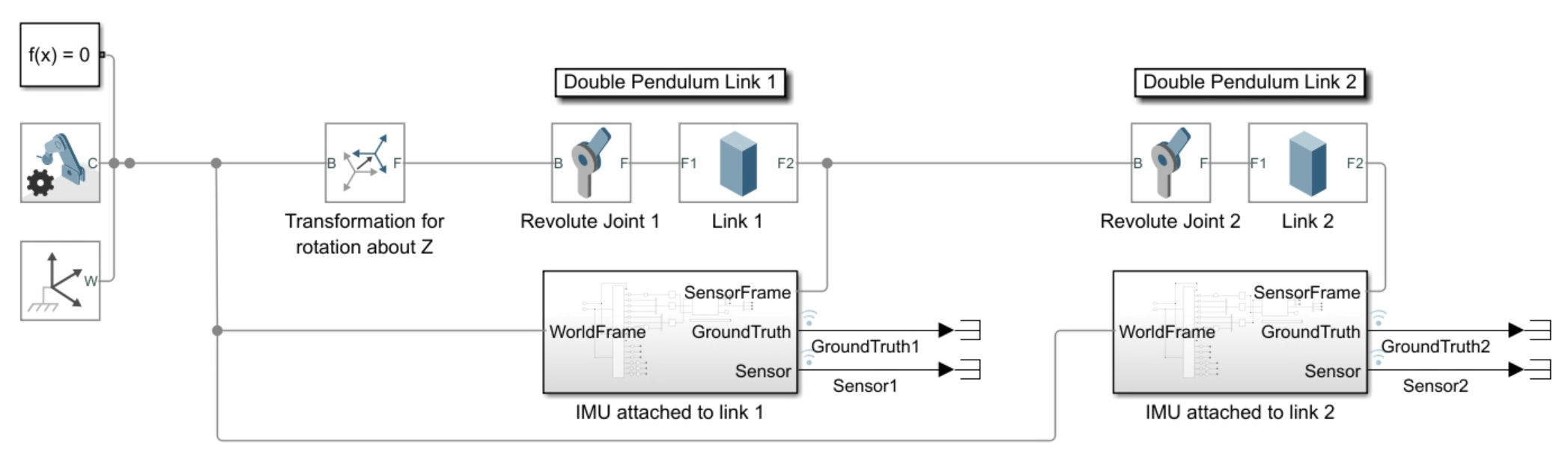
基于matlab的IMU姿态解算,姿态类型为四元数;角速度和线加速度的类型为三维向量。IMU全称是惯性导航系统,主要元件有陀螺仪、加速度计和磁力计。其中陀螺仪可以得到各个轴的加速度,而加速度计能得到x,y,z方向的加速度,而磁力计能获得周围磁场的信息。主要的工作便是将三个传感器的数据融合得到较为准确的姿态信息。程序已调通,可直接运行。

基于matlab的IMU姿态解算,姿态类型为四元数;角速度和线加速度的类型为三维向量。IMU全称是惯性导航系统,主要元件有陀螺仪、加速度计和磁力计。其中陀螺仪可以得到各个轴的加速度,而加速度计能得到x,y,z方向的加速度,而磁力计能获得周围磁场的信息。主要的工作便是将三个传感器的数据融合得到较为准确的姿态信息。程序已调通,可直接运行。