摘要: 随着工业自动化水平的不断提高,对设备状态的实时监测和预警显得尤为重要。本文介绍了一种基于STM32微控制器的工业设备状态监测系统,通过采集振动、温度、压力等关键数据,并利用异常检测算法进行分析,最终实现对设备状态的实时监控和预警。系统采用Modbus/Profibus协议将数据传输至上位机,并通过LCD显示屏和LED指示灯进行本地显示,方便操作人员实时了解设备运行状况。
关键词: 工业设备、状态监测、STM32、传感器、异常检测、Modbus/Profibus
1. 项目概述
工业设备状态监测系统旨在实时监测设备运行状态,及时发现潜在故障,从而提高设备运行效率和安全性。本项目设计了一种基于STM32微控制器的工业设备状态监测系统,通过采集振动、温度、压力等关键数据,并利用异常检测算法进行分析,最终实现对设备状态的实时监控和预警。
1.1 项目目标
- 实时监测工业设备的振动、温度、压力等关键参数。
- 利用异常检测算法识别设备运行数据中的异常情况。
- 通过LCD显示屏和LED指示灯进行本地显示,方便操作人员实时了解设备运行状况。
- 通过Modbus/Profibus协议将设备状态数据传输至上位机,实现远程监控和数据分析。
1.2 项目意义
- 提高设备运行效率,减少设备停机时间。
- 降低设备故障率,延长设备使用寿命。
- 提高生产安全,避免因设备故障导致的生产事故。
2. 系统设计
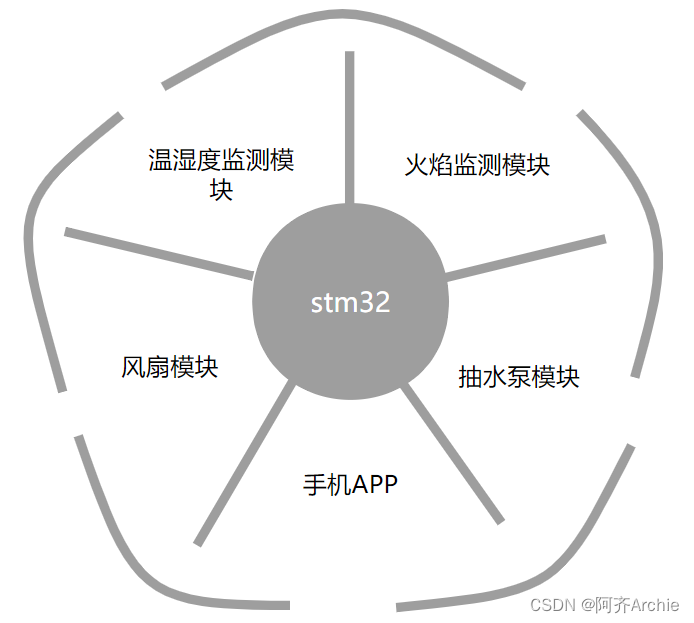
2.1 系统架构
系统架构图如下:

2.2 硬件设计
系统硬件主要包括:
- 主控芯片: STM32F407VET6,具有高性能CPU和丰富的外设接口,能够满足实时数据采集和处理的需求。
- 传感器:
- 振动传感器: 用于监测设备振动情况,识别异常振动模式。选择具有高灵敏度和高精度的小型振动传感器,例如ADXL345。
- 温度传感器: 用于监测设备运行温度,识别过热或过冷情况。选择具有高精度和快速响应的温度传感器,例如LM35。
- 压力传感器: 用于监测设备工作压力,识别压力异常情况。选择具有高精度和宽测量范围的压力传感器,例如MPX5700DP。
- 显示模块: 128x64点阵LCD显示屏,用于显示设备状态信息和报警提示。选择具有高清晰度和易于操作的LCD显示屏。
- 指示灯: LED指示灯,用于指示设备运行状态和报警情况。选择具有高亮度和耐用性的LED指示灯。
- 通信模块: Modbus/Profibus通信模块,用于将设备状态数据传输至上位机。选择具有高可靠性和高性能的Modbus/Profibus通信模块。
2.3 软件设计
系统软件主要包括:
实时操作系统 (RTOS): FreeRTOS,用于管理系统任务和资源,保证系统实时性和稳定性。FreeRTOS 提供了任务调度、内存管理、信号量等功能,可以有效地管理系统资源,提高系统可靠性。
传感器驱动程序: 负责与传感器进行数据交互,并进行数据预处理,例如校准、滤波等。每个传感器驱动程序都应包含以下功能:
- 初始化传感器接口
- 读取传感器数据
- 校准传感器数据
- 数据滤波处理
- 数据格式转换
异常检测算法: 基于统计分析或机器学习算法,识别设备运行数据中的异常情况。可以选择基于阈值法、统计过程控制法、神经网络等算法进行异常检测。
- 基于阈值法: 根据历史数据统计出正常运行数据范围,当传感器数据超出预设阈值时,判定为异常。
- 统计过程控制法: 利用统计方法分析传感器数据,识别数据偏离趋势,判断异常。
- 机器学习算法: 利用机器学习模型,训练识别设备正常和异常运行模式,实时判断设备状态。
数据处理模块: 对采集到的数据进行分析和处理,生成设备状态报告,例如计算设备运行指标、识别故障模式等。
人机界面模块: 负责与LCD显示屏和LED指示灯进行交互,显示设备状态信息和报警提示,并提供简单的用户操作界面。
通信模块: 负责与上位机进行数据传输,实现远程监控和控制。支持Modbus/Profibus协议,实现与上位机数据交互。
3. 代码示例
以下代码示例展示了STM32微控制器上实现传感器数据采集、异常检测和数据传输的基本流程。
3.1 读取振动传感器数据
int16_t read_accelerometer_x(void) {
// 配置SPI通信参数
SPI_HandleTypeDef hspi1;
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES_FULL_DUPLEX;
hspi1.Init.DataSize = SPI_DATASIZE_16BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_HIGH;
hspi1.Init.Phase = SPI_PHASE_2EDGE_RISING;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_VALUE;
HAL_SPI_Init(&hspi1);
// 读取传感器ID
uint8_t id = read_sensor_id(hspi1);
// ... (验证传感器ID)
// 读取振动数据
uint8_t data[6];
HAL_SPI_TransmitReceive(&hspi1, data, data, 6);
// 转换数据格式
return (int16_t)((data[1] << 8) | data[0];
}
代码说明:
- 首先配置SPI通信参数,包括模式、方向、数据大小、极性和时钟相位、波特率等。
- 然后读取传感器ID,验证传感器类型。
- 最后使用SPI通信协议读取传感器数据,并将其转换为16位整数类型返回。
3.2 读取温度传感器数据
float read_temperature_sensor(void) {
// 配置ADC通道
ADC_HandleTypeDef hadc;
hadc.Instance = ADC1;
hadc.Init.Resolution = ADC_RESOLUTION_12BIT;
// ... (配置其他ADC参数)
HAL_ADC_Init(&hadc);
// 启动ADC转换
HAL_ADC_Start(&hadc);
// 等待转换完成
while (HAL HAL_ADC_PollForConversion(&hadc) == HAL_OK);
// 读取转换结果
return HAL_ADC_GetValue(&hadc);
}
代码说明:
- 首先配置ADC通道,包括分辨率、采样率、转换模式等。
- 然后启动ADC转换,并等待转换完成。
- 最后读取转换结果,并返回温度值。
3.3 读取压力传感器数
float read_pressure_sensor(void) {
// 配置ADC通道
ADC_HandleTypeDef hadc;
hadc.Instance = ADC2; // 假设压力传感器连接到ADC2
hadc.Init.Resolution = ADC_RESOLUTION_12BIT;
// ... (配置其他ADC参数)
HAL_ADC_Init(&hadc);
// 启动ADC转换
HAL_ADC_Start(&hadc);
// 等待转换完成
while (HAL_ADC_PollForConversion(&hadc) != HAL_OK);
// 读取转换结果
uint32_t adc_value = HAL_ADC_GetValue(&hadc);
// 将ADC值转换为压力值
// ... (根据传感器规格书进行转换)
float pressure = adc_value * VOLTAGE_REFERENCE / 4095 * PRESSURE_SCALE_FACTOR;
return pressure;
}
代码说明:
- 与温度传感器类似,首先配置ADC通道,但这次假设压力传感器连接到ADC2。
- 启动ADC转换并等待完成。
- 读取转换结果 (adc_value)。
- 根据传感器规格书,将ADC值转换为实际的压力值。这通常涉及将ADC值映射到电压,然后使用比例因子将其转换为压力单位。
3.4 异常检测示例 (基于阈值法)
#define VIBRATION_THRESHOLD_HIGH 1000 // 振动阈值上限
#define VIBRATION_THRESHOLD_LOW 500 // 振动阈值下限
#define TEMPERATURE_THRESHOLD_HIGH 80 // 温度阈值上限
#define TEMPERATURE_THRESHOLD_LOW 10 // 温度阈值下限
#define PRESSURE_THRESHOLD_HIGH 100 // 压力阈值上限
#define PRESSURE_THRESHOLD_LOW 10 // 压力阈值下限
bool check_for_anomaly(int16_t vibration, float temperature, float pressure) {
if (vibration > VIBRATION_THRESHOLD_HIGH || vibration < VIBRATION_THRESHOLD_LOW ||
temperature > TEMPERATURE_THRESHOLD_HIGH || temperature < TEMPERATURE_THRESHOLD_LOW ||
pressure > PRESSURE_THRESHOLD_HIGH || pressure < PRESSURE_THRESHOLD_LOW) {
return true; // 存在异常
} else {
return false; // 运行正常
}
}代码说明:
- 定义了振动、温度和压力的阈值上限和下限。
check_for_anomaly()函数接收传感器数据,并根据预设的阈值判断是否存在异常。
3.5 数据传输示例 (Modbus RTU)
// 使用第三方Modbus库函数发送数据
uint8_t modbus_data[4]; // 存储要发送的数据
modbus_data[0] = (uint8_t)(vibration >> 8);
modbus_data[1] = (uint8_t)vibration;
modbus_data[2] = (uint16_t)(temperature * 10) >> 8; // 将温度放大10倍并存储
modbus_data[3] = (uint16_t)(temperature * 10);
// 使用Modbus库函数发送数据
ModbusRTU_WriteMultipleRegisters(slave_address, starting_address, modbus_data, 4); 代码说明:
- 将要发送的传感器数据 (振动、温度) 转换为 Modbus 数据格式。
- 使用第三方 Modbus 库函数 将数据发送到指定从站地址和寄存器地址。
ModbusRTU_WriteMultipleRegisters()
4. 总结
本文介绍了基于STM32微控制器的工业设备状态监测系统的基本设计思路和代码示例。实际应用中,需要根据具体需求选择合适的传感器、异常检测算法和通信协议,并进行系统优化和测试。