Arduino是一个开放源码的电子原型平台,它可以让你用简单的硬件和软件来创建各种互动的项目。Arduino的核心是一个微控制器板,它可以通过一系列的引脚来连接各种传感器、执行器、显示器等外部设备。Arduino的编程是基于C/C++语言的,你可以使用Arduino IDE(集成开发环境)来编写、编译和上传代码到Arduino板上。Arduino还有一个丰富的库和社区,你可以利用它们来扩展Arduino的功能和学习Arduino的知识。
Arduino的特点是:
1、开放源码:Arduino的硬件和软件都是开放源码的,你可以自由地修改、复制和分享它们。
2、易用:Arduino的硬件和软件都是为初学者和非专业人士设计的,你可以轻松地上手和使用它们。
3、便宜:Arduino的硬件和软件都是非常经济的,你可以用很低的成本来实现你的想法。
4、多样:Arduino有多种型号和版本,你可以根据你的需要和喜好来选择合适的Arduino板。
5、创新:Arduino可以让你用电子的方式来表达你的创意和想象,你可以用Arduino来制作各种有趣和有用的项目,如机器人、智能家居、艺术装置等。

Arduino FOC(Field Oriented Control,场向量控制)是一种先进的电机控制技术,它允许精确控制电机的转矩和速度。这种控制技术特别适用于无刷直流电机(BLDC)和步进电机。在Arduino平台上实现FOC可以提供平滑的运行和高度的扭矩、速度和位置控制,它通过精确控制电机的电流和电压来实现高效率、高精度和低噪声的操作。
主要特点:
1、高性能电机控制:FOC是一种高级的电机控制算法,可以精准控制PMSM(永磁同步电机)和BLDC(无刷直流)电机,实现平滑的转速和扭矩输出。
2、闭环控制架构:FOC采用闭环反馈控制,通过检测电机的位置和速度数据,实时调整输出电压和电流,确保电机动作符合预期。
3、模块化设计:Arduino FOC库采用模块化设计,包含电机建模、速度/位置/电流控制环、PWM生成等子模块,用户可根据需求灵活组合使用。
4、可移植性强:Arduino FOC可移植到多种硬件平台,如Arduino、ESP32、STM32与树莓派等,适用于功率从几十瓦到几千瓦的电机系统。
5、参数自动识别:FOC库具有自动识别电机参数的功能,可以大幅简化电机控制系统的调试过程。
应用场景:
1、工业自动化:在工厂的机器人、传送带、CNC加工设备等领域,Arduino FOC可提供高性能的电机控制解决方案。
2、电动车辆:电动自行车、电动汽车、电动叉车等车载电机驱动系统,可以采用Arduino FOC进行精准控制。
3、家用电器:在电风扇、洗衣机、空调等家用电器中,Arduino FOC可实现细腻的电机速度和扭矩控制。
4、航模和无人机:航模飞机、无人机等对电机控制性能要求很高的领域,Arduino FOC能够提供高精度的电机驱动。
5、机器人:工业机器人、服务机器人、仿生机器人等对电机控制性能有严格要求的领域,Arduino FOC是一个不错的选择。
需要注意的事项:
1、硬件要求:Arduino FOC对控制器的性能(如CPU频率、RAM/ROM容量等)有一定要求,需要选择合适的硬件平台。
2、调试复杂性:FOC算法涉及电机建模、坐标变换、PI调节器等诸多环节,调试和调优过程相对复杂,需要一定的专业知识。
3、噪声抑制:电机驱动电路容易产生噪声干扰,需要采取合理的屏蔽和滤波措施,确保信号质量。
4、安全防护:电机驱动系统可能会产生过电流、过压等故障,需要配备可靠的保护电路,确保人身和设备安全。
5、系统集成:将Arduino FOC集成到完整的电机驱动系统中时,需要考虑机械、电力、控制等各个方面的协调配合。
总的来说,Arduino FOC是一种功能强大、性能优秀的电机控制解决方案,适用于工业自动化、电动车辆、家用电器等众多领域。但在硬件选型、算法调试、噪声抑制和安全防护等方面都需要谨慎考虑,以确保系统稳定可靠地运行。
附录:系列目录
1、Arduino FOC的特点、场景和使用事项
http://t.csdnimg.cn/WZhYL
2、Arduino FOC 之简单FOC库 - 跨平台的无刷直流和步进电机FOC实现
http://t.csdnimg.cn/p9ADE
3、Arduino FOC 之无刷直流电机速度控制
http://t.csdnimg.cn/gZ7CY
4、Arduino FOC 之步进电机位置控制
http://t.csdnimg.cn/VYbIb
5、Arduino FOC 之无刷直流电机电流控制
http://t.csdnimg.cn/wWGVu
6、Arduino FOC 之 SimpleFOC 库的主要函数
http://t.csdnimg.cn/S26MC
7、Arduino FOC 之 ArduinoFOC库的核心函数
http://t.csdnimg.cn/3VLzF
8、Arduino FOC 之传感器校准
http://t.csdnimg.cn/NS3TR
9、Arduino FOC 之SimpleFOCShield v2.0.4无刷电机驱动板
http://t.csdnimg.cn/g9mP7
10、Arduino FOC 之 AS5600角度读取
http://t.csdnimg.cn/dmI6F
11、Arduino FOC 之 FOC算法
http://t.csdnimg.cn/ENxc0
12、Arduino FOC 之 SimpleFOC库的适配电机方案
http://t.csdnimg.cn/QdH6k

1、主要特点:
利用Arduino FOC实现对双足机器人各关节的精确位置伺服控制。
基于零时刻加速度 (ZMP) 概念,通过实时监测重心位置,控制机器人保持动态平衡。
采用先进的步态规划算法,如逆运动学、模型预测控制等,生成合适的关节角度轨迹。
集成了自适应的姿态稳定控制策略,可实时调整关节扭矩,抑制外界干扰造成的倾斜。
支持机器人腿部参数的在线自动标定和优化,提高控制精度和适应性。
具备人机交互接口,可根据实际需求调整步态、速度、方向等运动参数。
2、应用场景:
户外和复杂地形环境下的双足机器人,如探险机器人、消防救援机器人等。
医疗康复设备,如智能义肢、外骨骼等,需要仿人体平衡步态。
教育和科研领域,可用于研究新型步态控制算法和机器人自主决策。
娱乐和展示,如机器人表演、互动展示等,对稳定性和适应性有较高要求。
工厂内部运输和搬运,需要机器人具有良好的平衡性和适应性。
3、需要注意的事项:
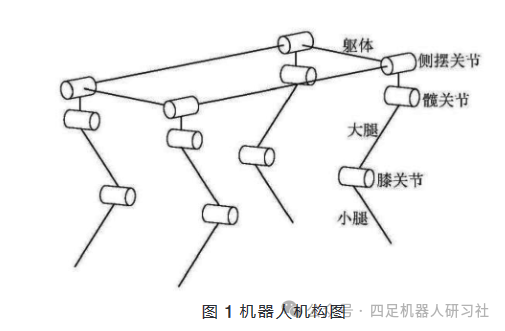
机器人腿部结构和关节参数的建模精度,直接影响步态控制效果。
高精度的关节位置传感器选型和安装,确保反馈信息的准确性。
电机驱动器的功率匹配和控制策略,满足快速响应和大扭矩需求。
步态规划算法的实时性和鲁棒性,适应复杂环境和外界干扰。
姿态稳定控制策略的设计优化,平衡机器人重心并抑制倾斜。
整体系统的安全性和可靠性保障,包括紧急停止、过载保护等。
与上层的感知、决策、规划等模块的良好集成和协调配合。
总的来说,Arduino FOC中双足机器人的平衡步态控制是一种复杂的、多学科交叉的技术。在实际应用中,需要重点关注机器人机械结构的建模与标定、传感器集成、控制算法的设计优化,以及整体系统的安全可靠性,确保机器人能够在复杂环境下保持稳定的动态平衡行走。

当涉及到双足机器人的平衡步态控制时,代码的实现会更加复杂。下面是几个实际运用程序参考代码案例,以帮助您入门。这些案例只提供了基本的代码框架和要点解读,实际实现可能需要根据具体的硬件配置和算法需求进行进一步的修改和优化。
1、基于传感器反馈的简单步态控制
#include <SimpleFOC.h>
// 双足机器人参数
float kp = 0.1; // 比例增益
float ki = 0.01; // 积分增益
float kd = 0.001; // 微分增益
// 定义电机对象
BLDCMotor motor1 = BLDCMotor(9);
BLDCMotor motor2 = BLDCMotor(10);
// 定义位置传感器对象
Encoder encoder1 = Encoder(2, 3, 1000);
Encoder encoder2 = Encoder(4, 5, 1000);
// 定义PID控制器对象
PIDController pid1 = PIDController(kp, ki, kd);
PIDController pid2 = PIDController(kp, ki, kd);
void setup()
{
// 初始化串口
Serial.begin(115200);
// 电机初始化
motor1.voltage_power_supply = 12;
motor1.init();
motor2.voltage_power_supply = 12;
motor2.init();
// 位置传感器初始化
encoder1.init();
encoder2.init();
// 设置PID控制器的目标位置
pid1.target = 0.0;
pid2.target = 0.0;
}
void loop()
{
// 读取位置传感器的当前位置
float current_position1 = encoder1.getAngle();
float current_position2 = encoder2.getAngle();
// 使用PID控制器计算输出电压
float voltage1 = pid1.update(current_position1);
float voltage2 = pid2.update(current_position2);
// 将输出电压应用于电机
motor1.move(voltage1);
motor2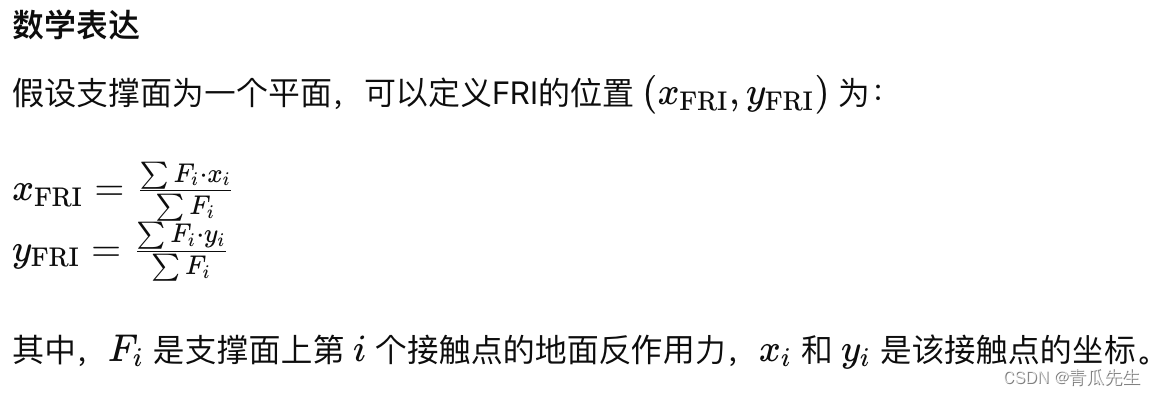

![[<span style='color:red;'>足</span>式<span style='color:red;'>机器人</span>]Part4 南科大高等<span style='color:red;'>机器人</span><span style='color:red;'>控制</span>课 Ch08 Rigid Body Dynamics](https://img-blog.csdnimg.cn/direct/fb1b92de2d7e4804b8b0834d964ab443.png)
![[<span style='color:red;'>足</span>式<span style='color:red;'>机器人</span>]Part4 南科大高等<span style='color:red;'>机器人</span><span style='color:red;'>控制</span>课 CH11 Bascis of Optimization](https://img-blog.csdnimg.cn/direct/7367f0f5893e49ac879b695052b43f48.png#pic_center)
























![[深度学习]基于yolov10+streamlit目标检测演示系统设计](https://i-blog.csdnimg.cn/direct/0694137ef2de4e1988f361e2937b709c.png)