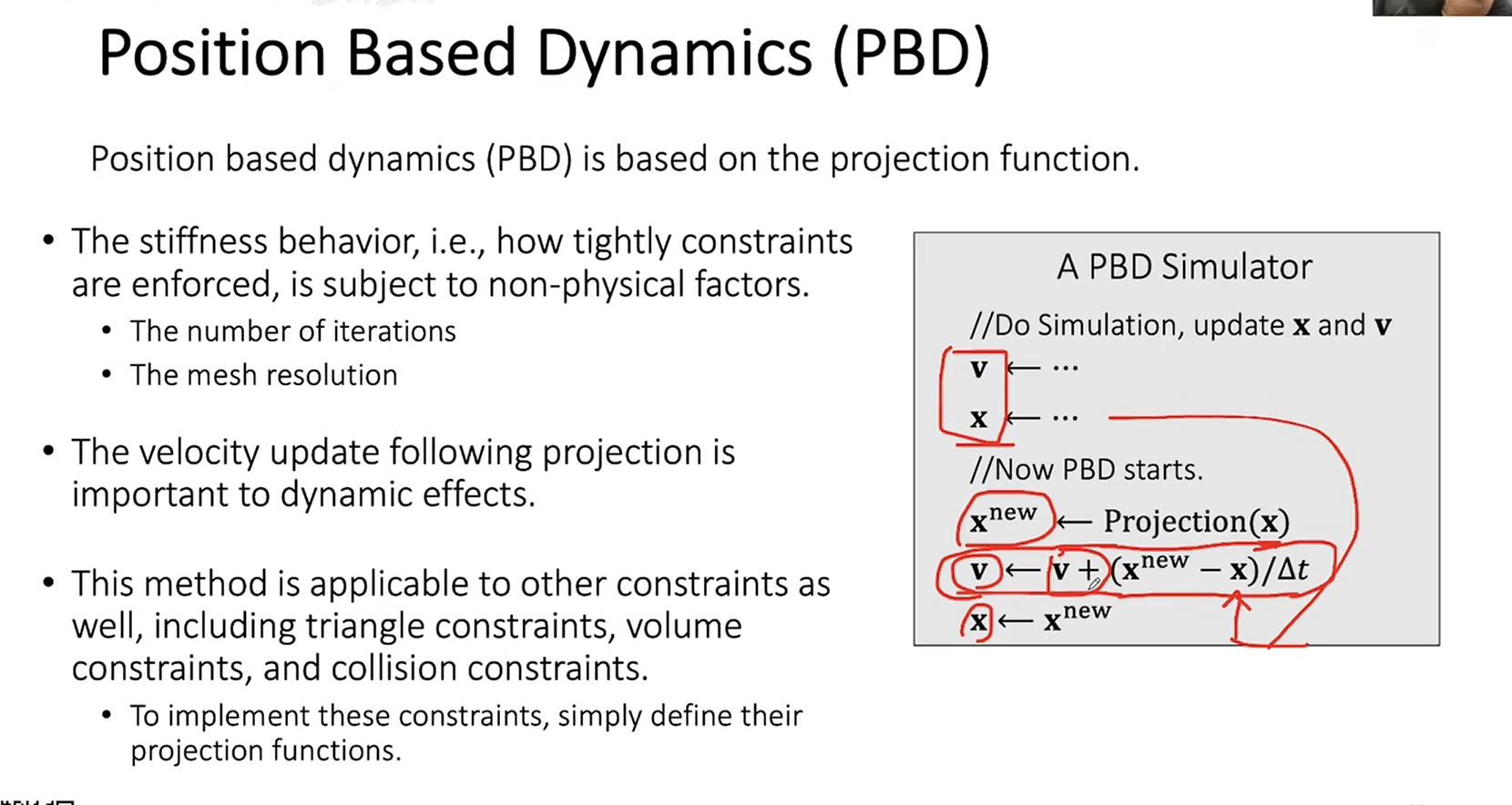
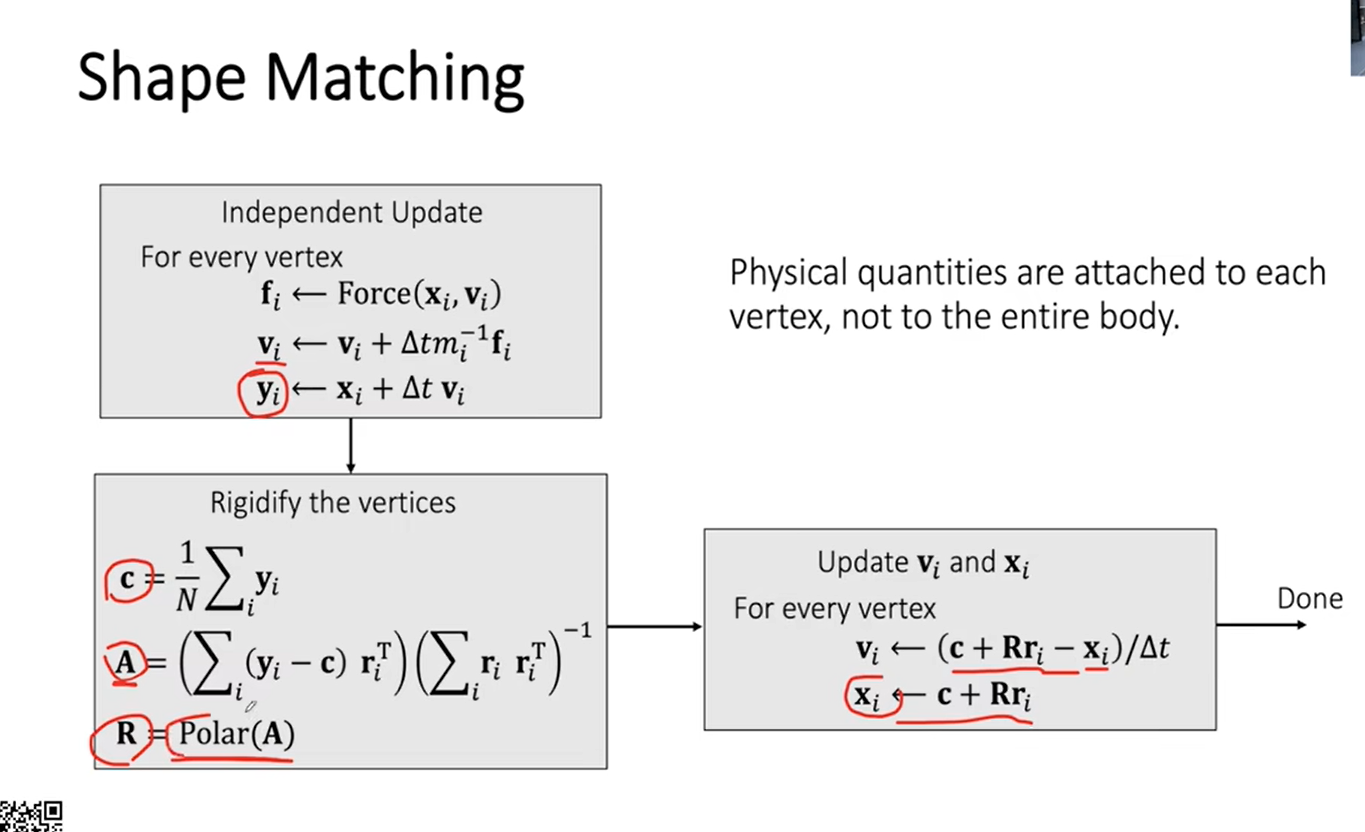
PBD方法
首先是每个质点的力的分析,不考虑碰撞和弹簧弹力的情况下,每个质点受重力的影响,所以需要对每个质点进行速度和位置的重力影响更新。
float t= 0.0333f;
float damping= 0.99f;
int[] E;
float[] L;
Vector3[] V;
Vector3 gravity = new Vector3(0.0f, -9.8f, 0.0f);
......
for(int i=0; i<X.Length; i++)
{
if(i==0 || i==20) continue;
V[i] = V[i] + gravity * t;
V[i] *= damping;
X[i] = X[i] + V[i] * t;
//Initial Setup
//...
}思考一个问题,现实生活中布料的每个质点在拉扯变大以后,会越来越难以拉扯,基于胡可定律的弹簧模型中需要增大弹性系数k来模拟这种现象,但这会造成显式积分和隐式积分都出现问题,增大了模拟计算量。基于约束的方法被提出的动机就是想要解决这个问题。也就是PBD
使用Jacobi的方式对质点进行约束位置更新。然后通过PBD的算法流程对位置和速度进行更新。
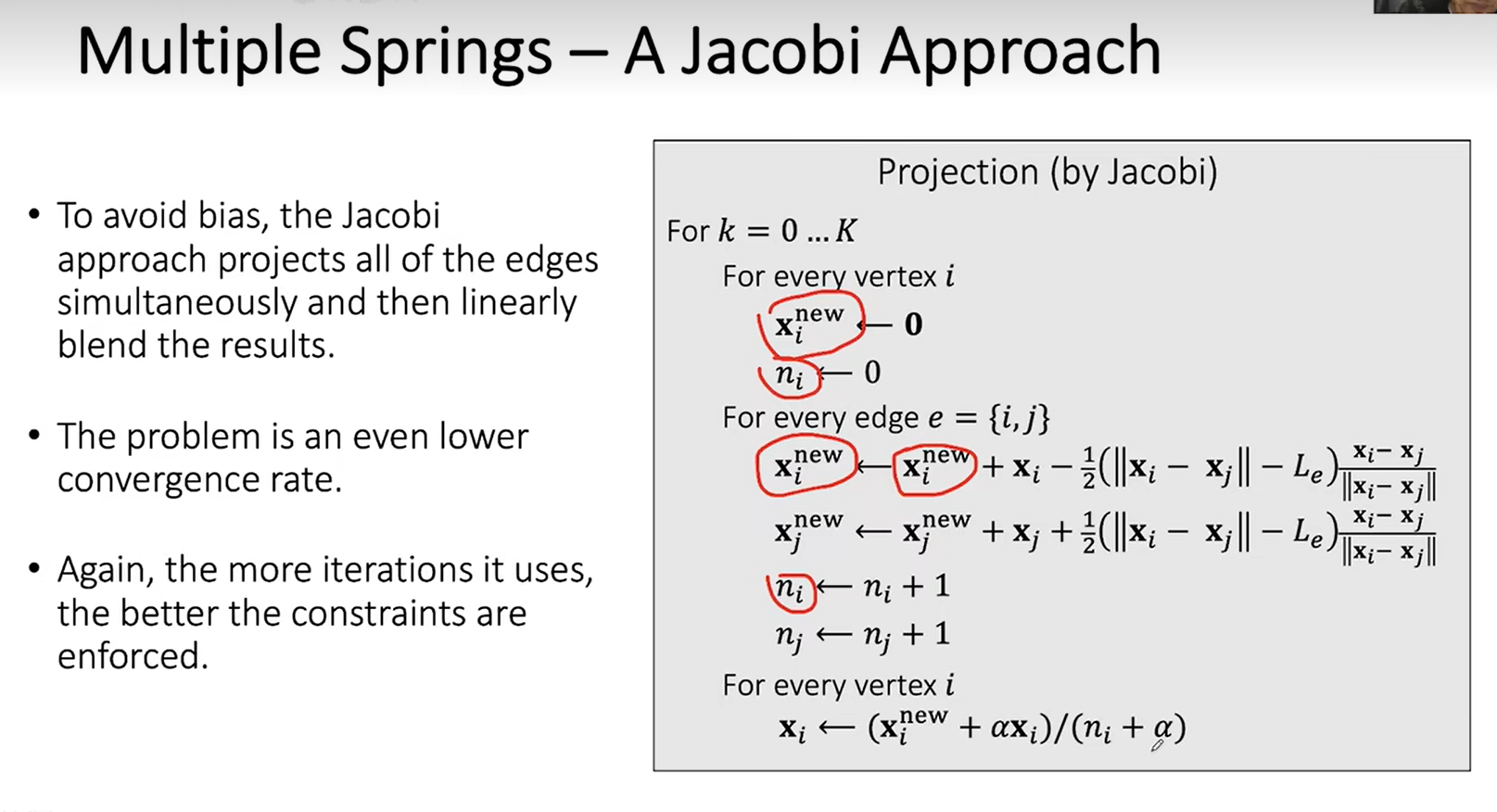
void Strain_Limiting()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
Vector3[] vertices = mesh.vertices;
Vector3[] vertices_new = new Vector3[vertices.Length];
int[] n = new int[vertices.Length];
for(int i = 0; i < vertices.Length; i++)
{
vertices_new[i] = new Vector3(0.0f, 0.0f, 0.0f);
n[i] = 0;
}
for(int e = 0; e < L.Length; e++)//注意是消重的
{
int a = E[e * 2 + 0];
int b = E[e * 2 + 1];
Vector3 a_b = vertices[a] - vertices[b];
float halfDistance = (a_b.magnitude - L[e])*0.5f;
Vector3 pointMove = halfDistance * a_b.normalized;
vertices_new[a] = vertices_new[a] + vertices[a] - pointMove;
vertices_new[b] = vertices_new[b] + vertices[b] + pointMove;
n[a]++;
n[b]++;
}
for(int i = 0; i < vertices.Length; i++)
{
if (i == 0 || i == 20) continue;
V[i] = V[i] + ((vertices_new[i] + 0.2f * vertices[i]) / (n[i] + 0.2f) - vertices[i]) / t;
vertices[i] = (vertices_new[i] + 0.2f * vertices[i]) / (n[i] + 0.2f);
}
//Apply PBD here.
//...
mesh.vertices = vertices;
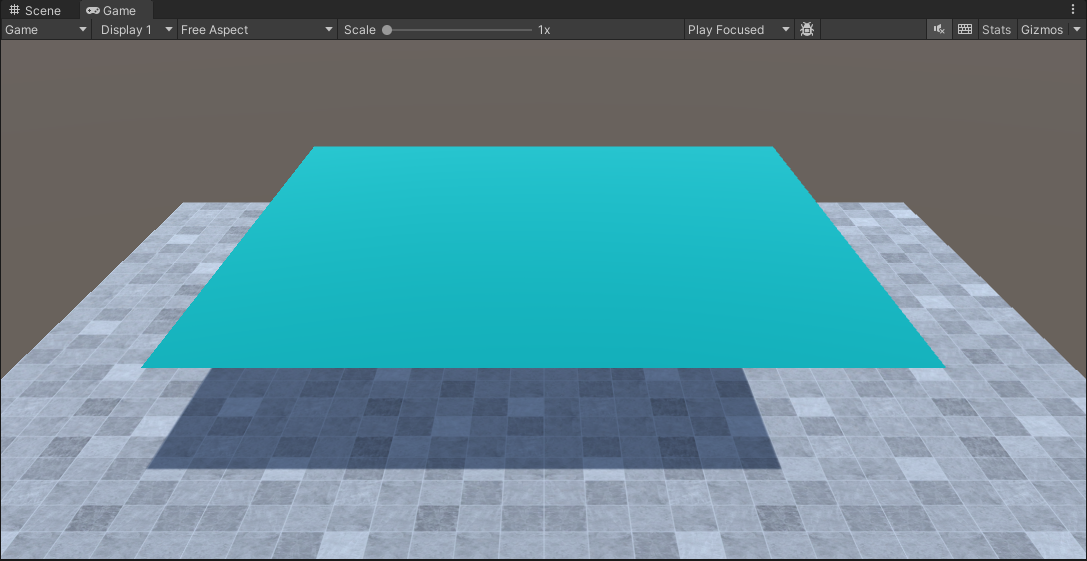
}布料效果
球的撞击
在之前的课程中,求的是刚体对碰撞体进行撞击,所以最后要进行约束回来,但是这里不需要,这是流体。
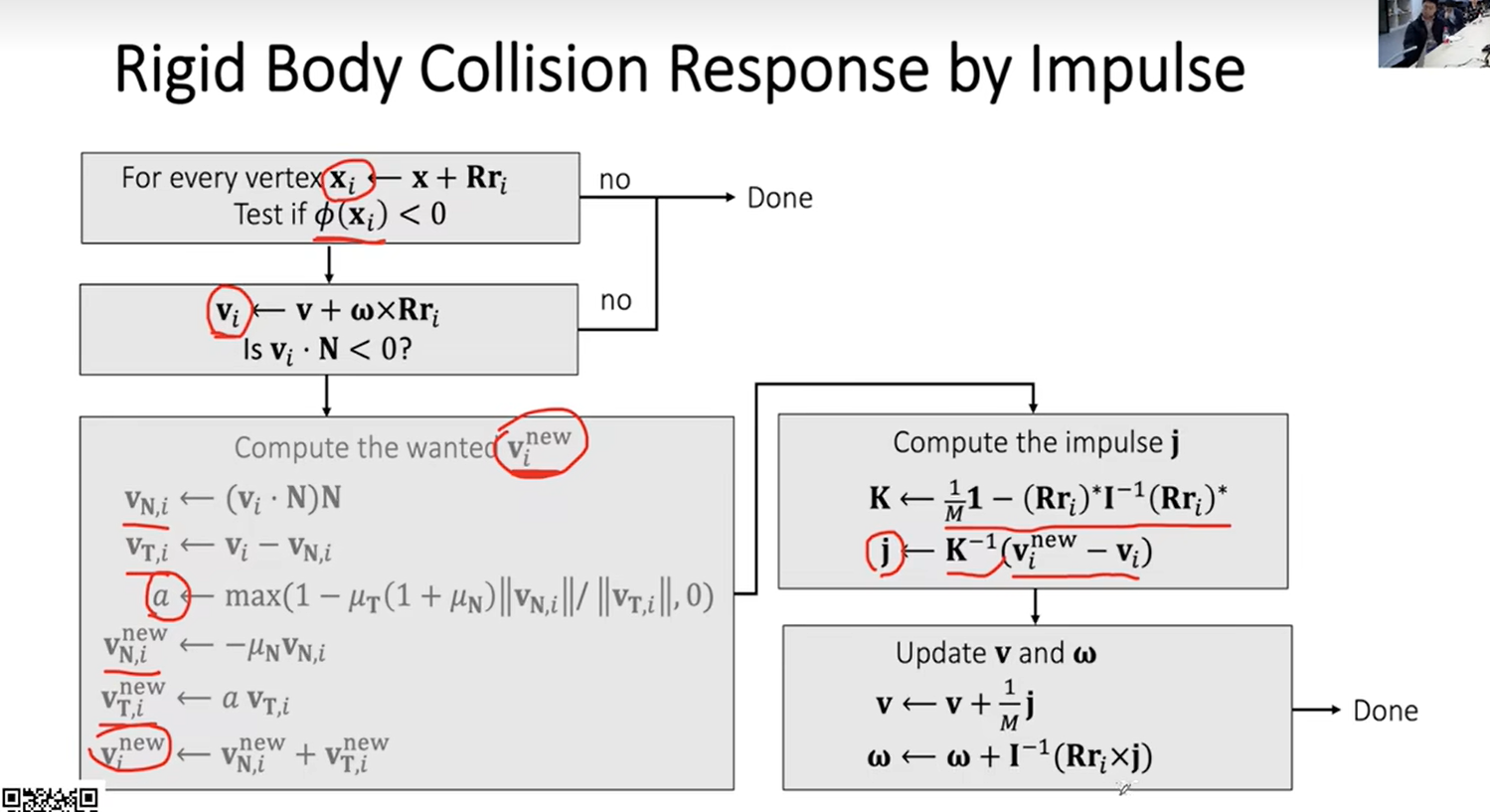
这里计算碰撞位移是在PBD以后,才计算是否发生碰撞以及碰撞后的速度和位移变换。(这些都算在一个帧内进行更新)
void Collision_Handling()
{
Mesh mesh = GetComponent<MeshFilter> ().mesh;
Vector3[] X = mesh.vertices;
Vector3 spherePosition = sphere.transform.position;
for(int i = 0; i < X.Length; i++)
{
if (i == 0 || i == 20) continue;
if ((X[i] - spherePosition).magnitude > r)
{
continue;
}
//发生碰撞,得到碰撞点
Vector3 collosionPoint = r * (X[i] - spherePosition).normalized + spherePosition;
Vector3 normal = (collosionPoint - spherePosition).normalized;
float jud = Vector3.Dot(V[i], normal);
/*V[i] = V[i]+ (collosionPoint - X[i]) / t;
X[i] = collosionPoint;*/
Vector3 v_N = jud * normal;
Vector3 v_T = V[i] - v_N;
//作业这里的意思是碰撞以后,位移到球体表面
v_N = v_N + (collosionPoint - X[i]) / t;
X[i] = collosionPoint;
V[i] = v_N + v_T;//忽略摩擦
}
//For every vertex, detect collision and apply impulse if needed.
//...
mesh.vertices = X;
}效果





















![[RCTF2015]EasySQL](https://i-blog.csdnimg.cn/direct/cb2cf0ae754f4817ac5c7664c9646034.png)