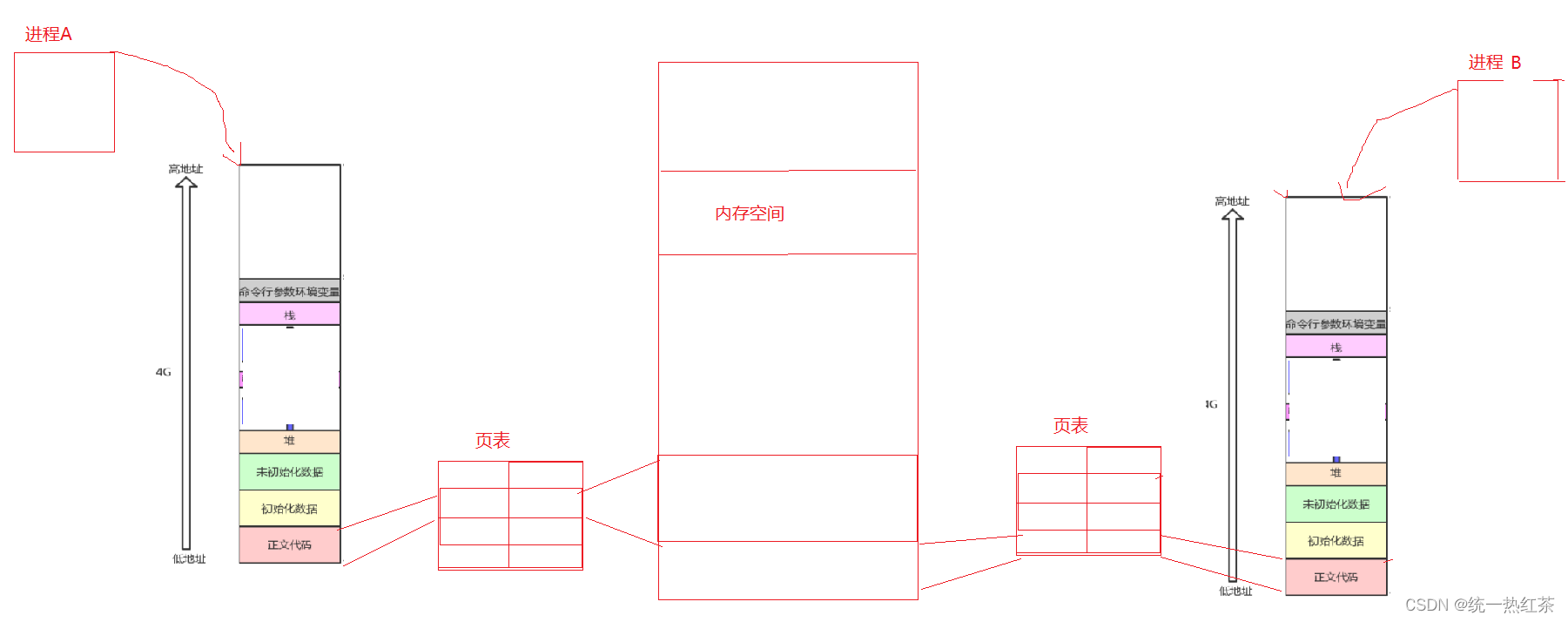
进程间通信(IPC,Inter-Process Communication)是指在操作系统中,不同进程之间进行数据交换和信息传递的机制。这种通信允许正在运行的多个进程能够相互协作、共享数据或者进行同步操作,以实现更复杂的任务和功能。Linux环境下,进程地址空间相互独立,每个进程各自有不同的用户地址空间。任何一个进程的全局变量在另一个进程中都看不到,所以进程和进程之间不能相互访问,要交换数据必须通过内核,在内核中开辟一块缓冲区,进程1把数据从用户空间拷到内核缓冲区,进程2再从内核缓冲区把数据读走,内核提供的这种机制称为进程间通信。

1.管道-pipe
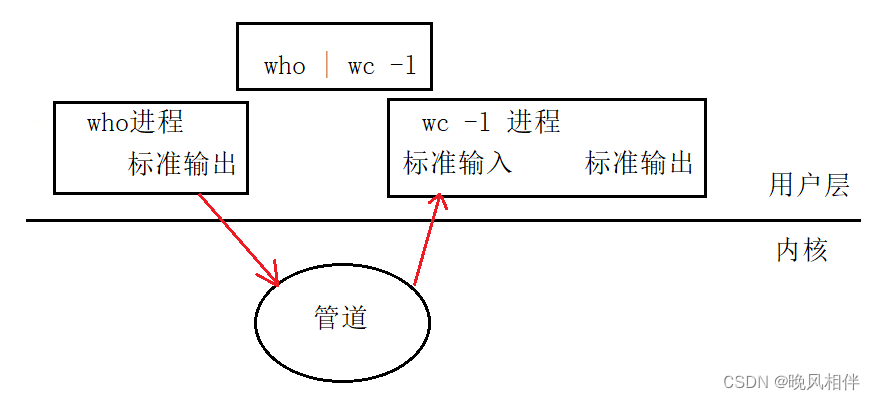
管道(Pipe)是一种进程间通信(IPC)机制,允许具有亲缘关系的进程之间进行单向通信。它是Unix和类Unix操作系统中常见的IPC方式之一,通常用于在父子进程或者兄弟进程之间传递数据。
概念:
管道是一种特殊的文件描述符,它连接了两个进程,其中一个进程的输出作为另一个进程的输入。管道是单向的,即数据只能在一个方向上流动。通常有两种类型的管道:
匿名管道:存在于具有亲缘关系的进程之间,通常用于父子进程之间或者通过
fork()系统调用创建的进程间通信。命名管道(FIFO):是一种特殊的文件系统对象,允许不相关的进程通过文件路径来进行通信。
原理:
管道基于操作系统提供的内核缓冲区进行数据传输。在Unix系统中,管道可以通过pipe()系统调用创建。pipe()系统调用会创建一个管道,并返回两个文件描述符:
- 第一个文件描述符用于管道的写入端(写入数据的进程将数据发送到这一端)。
- 第二个文件描述符用于管道的读取端(读取数据的进程从这一端接收数据)。
管道的工作原理可以简单描述为:
- 进程A调用
pipe()系统调用创建管道,得到两个文件描述符fd[0](读取端)和fd[1](写入端)。 - 进程A通过
fork()创建进程B,此时进程A和进程B都能够访问这两个文件描述符。 - 进程A可以通过fd[1]写入数据到管道,而进程B可以通过fd[0]从管道中读取数据。
数据在管道中是先进先出(FIFO)的顺序进行传递,当进程向管道写入数据时,数据会被存储在内核缓冲区中,等待被读取进程读取。

局限性:
单向通信:管道只支持单向数据传输,即数据只能从一个方向流动。
具有亲缘关系的进程:匿名管道只能用于具有亲缘关系的进程之间,通常是父子进程或者通过
fork()创建的进程。容量有限:管道的容量是有限的,通常在几千字节到几兆字节之间,这取决于操作系统的具体实现。
无法进行双向通信:如果需要双向通信,通常需要创建两个管道,一个用于从父进程到子进程,另一个用于从子进程到父进程。
阻塞问题:管道的读取端和写入端在一些情况下可能会发生阻塞,特别是当管道为空或者已满时。
1.1pipe()
管道(Pipe)通过pipe()系统调用来创建。pipe()函数可以在进程间创建一个管道,这个管道具有两个文件描述符:一个用于读取端,一个用于写入端。这种方式可以实现具有亲缘关系的进程之间的单向通信。
函数原型:
#include <unistd.h>
int pipe(int pipefd[2]);
参数:pipefd是一个整型数组,长度为2,用于存储管道的两个文件描述符。
pipefd[0]:用于读取管道数据的文件描述符(读取端)。
pipefd[1]:用于写入管道数据的文件描述符(写入端)。
返回值:成功时返回0,失败时返回-1,并设置errno以指示错误类型。示例代码:父子进程使用管道pipe通信
一个进程在由pipe()创建管道后,一般再fork一个子进程,然后通过管道实现父子进程间的通信(因此也不难推出,只要两个进程中存在血缘关系,这里的血缘关系指的是具有共同的祖先,都可以采用管道方式来进行通信)。父子进程间具有相同的文件描述符,且指向同一个管道pipe,其他没有关系的进程不能获得pipe()产生的两个文件描述符,也就不能利用同一个管道进行通信。
步骤:
第一步:父进程创建管道:

第二步:父进程fork出子进程:

第三步:父进程关闭fd[0],子进程关闭fd[1]

创建步骤总结:
- 父进程调用pipe函数创建管道,得到两个文件描述符fd[0]和fd[1],分别指向管道的读端和写端。
- 父进程调用fork创建子进程,那么子进程也有两个文件描述符指向同一管。
- 父进程关闭管道读端,子进程关闭管道写端。父进程可以向管道中写入数据,子进程将管道中的数据读出,这样就实现了父子进程间通信。
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <string.h>
#include <stdlib.h>
#define BUFFER_SIZE 25
int main() {
int pipefd[2];
pid_t pid;
char parent_message[BUFFER_SIZE] = "Hello, child!";
char child_message[BUFFER_SIZE];
// 创建管道
if (pipe(pipefd) == -1) {
perror("pipe");
exit(EXIT_FAILURE);
}
// 创建子进程
pid = fork();
if (pid < 0) { // 错误处理
perror("fork");
exit(EXIT_FAILURE);
}
if (pid > 0) { // 父进程
close(pipefd[0]); // 关闭父进程的读取端
// 向管道写入数据
write(pipefd[1], parent_message, strlen(parent_message) + 1);
printf("Parent wrote: %s\n", parent_message);
close(pipefd[1]); // 关闭写入端
// 等待子进程结束
wait(NULL);
} else { // 子进程
close(pipefd[1]); // 关闭子进程的写入端
// 从管道读取数据
read(pipefd[0], child_message, BUFFER_SIZE);
printf("Child read: %s\n", child_message);
close(pipefd[0]); // 关闭读取端
}
return 0;
}
示例代码:使用管道(pipe)实现两个进程间的全双工通信(即双向通信)
步骤:
- 创建两个管道:一个用于进程A到进程B的数据传输,另一个用于进程B到进程A的数据传输。
- 创建子进程:使用
fork()创建子进程。 - 关闭不需要的管道端:根据通信方向关闭不需要的管道端。
- 进行读写操作:进程A和进程B分别通过各自的管道端进行读写操作。
- 关闭管道:通信结束后关闭管道。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <sys/wait.h>
#define BUFFER_SIZE 1024
int main() {
int pipeAtoB[2]; // 管道A到B
int pipeBtoA[2]; // 管道B到A
pid_t pid;
char buffer[BUFFER_SIZE];
// 创建管道
if (pipe(pipeAtoB) == -1 || pipe(pipeBtoA) == -1) {
perror("pipe");
exit(EXIT_FAILURE);
}
// 创建子进程
pid = fork();
if (pid == -1) {
perror("fork");
exit(EXIT_FAILURE);
}
if (pid == 0) { // 子进程B
close(pipeAtoB[1]); // 关闭子进程B中A到B的写端
close(pipeBtoA[0]); // 关闭子进程B中B到A的读端
// 从父进程A读取数据
read(pipeAtoB[0], buffer, BUFFER_SIZE);
printf("Child process received: %s\n", buffer);
// 向父进程A发送数据
char *message = "Hello from Child Process!";
write(pipeBtoA[1], message, strlen(message) + 1);
close(pipeAtoB[0]); // 关闭子进程B中A到B的读端
close(pipeBtoA[1]); // 关闭子进程B中B到A的写端
exit(EXIT_SUCCESS);
} else { // 父进程A
close(pipeAtoB[0]); // 关闭父进程A中A到B的读端
close(pipeBtoA[1]); // 关闭父进程A中B到A的写端
// 向子进程B发送数据
char *message = "Hello from Parent Process!";
write(pipeAtoB[1], message, strlen(message) + 1);
// 从子进程B读取数据
read(pipeBtoA[0], buffer, BUFFER_SIZE);
printf("Parent process received: %s\n", buffer);
close(pipeAtoB[1]); // 关闭父进程A中A到B的写端
close(pipeBtoA[0]); // 关闭父进程A中B到A的读端
// 等待子进程结束
wait(NULL);
}
return 0;
}
注意事项:
- 管道关闭:每个进程关闭自己不需要的管道端,以防止数据流动错误和资源浪费。
- 同步问题:此示例程序使用简单的读写顺序进行同步。如果需要更复杂的同步机制,可能需要额外的同步方法(如信号量、条件变量等)。
- 缓冲区大小:确保缓冲区大小足够大以容纳传递的数据。
2.命名管道-FIFO
FIFO常被称为命名管道,以区分管道(pipe)。管道(pipe)只能用于“有血缘关系”的进程间通信。但通过FIFO,不相关的进程也能交换数据。
FIFO是Linux基础文件类型中的一种(文件类型为p,可通过ls -l查看文件类型)。但FIFO文件在磁盘上没有数据块,文件大小为0,仅仅用来标识内核中一条通道。进程可以打开这个文件进行read/write,实际上是在读写内核缓冲区,这样就实现了进程间通信。
2.1mkfifo()
函数原型:
#include <sys/types.h>
#include <sys/stat.h>
int mkfifo(const char *pathname, mode_t mode);
参数:
pathname:指定要创建的命名管道的路径名。
mode:指定创建的文件权限模式,类似于chmod()函数中的权限设置。通常使用S_IRUSR、S_IWUSR等宏定义来设置。
返回值:
成功:返回0。
失败:返回-1,并设置适当的错误码。示例代码:使用命名管道fifo完成两个进程的通信

写入数据
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <string.h>
#define FIFO_PATH "./myfifo"
#define BUFFER_SIZE 1024
int main() {
int fd;
char buffer[BUFFER_SIZE];
const char *message = "Hello from Process 1!";
// 创建命名管道
if (mkfifo(FIFO_PATH, 0666) == -1) {
perror("mkfifo");
exit(EXIT_FAILURE);
}
printf("Named pipe created at %s\n", FIFO_PATH);
// 打开命名管道以写入数据
fd = open(FIFO_PATH, O_WRONLY);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
// 写入数据到命名管道
strncpy(buffer, message, BUFFER_SIZE);
if (write(fd, buffer, strlen(buffer) + 1) == -1) {
perror("write");
close(fd);
exit(EXIT_FAILURE);
}
printf("Process 1 sent message: %s\n", message);
// 关闭管道
close(fd);
// 删除命名管道
if (unlink(FIFO_PATH) == -1) {
perror("unlink");
exit(EXIT_FAILURE);
}
printf("Named pipe deleted.\n");
return 0;
}
读取数据:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/types.h>
#define FIFO_PATH "./myfifo"
#define BUFFER_SIZE 1024
int main() {
int fd;
char buffer[BUFFER_SIZE];
// 打开命名管道以读取数据
fd = open(FIFO_PATH, O_RDONLY);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
// 从命名管道读取数据
if (read(fd, buffer, BUFFER_SIZE) == -1) {
perror("read");
close(fd);
exit(EXIT_FAILURE);
}
printf("Process 2 received message: %s\n", buffer);
// 关闭管道
close(fd);
return 0;
}
通常情况下,先启动写入数据的进程,再启动读取数据的进程。如果读取进程先启动,可能会导致它在尝试打开命名管道时出现阻塞,直到写入进程也启动并打开管道为止。
FIFO的阻塞特性:
- FIFO 是一种特殊的文件系统对象,它具有阻塞的特性。当一个进程尝试打开一个写端的 FIFO 进行写入操作时,如果没有进程打开对应的读端,写入进程可能会被阻塞,直到有进程打开了读端。
进程启动顺序的影响:
- 如果先启动了写入数据的进程,并且该进程尝试打开一个 FIFO 进行写入操作,但此时没有其他进程打开同一个 FIFO 的读端,写入进程会阻塞等待。
- 只有当读取数据的进程启动并打开了相同的 FIFO 读端时,写入进程才能继续执行,向 FIFO 写入数据。
示例代码:使用命名管道(FIFO)实现两个非血缘关系的进程间全双工通信
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <sys/stat.h>
#define FIFO_AtoB "fifo_a_to_b"
#define FIFO_BtoA "fifo_b_to_a"
#define BUFFER_SIZE 1024
int main() {
int fd_write, fd_read;
char buffer[BUFFER_SIZE];
int count = 0;
// 创建命名管道A到B
if (mkfifo(FIFO_AtoB, 0666) == -1) {
perror("mkfifo A to B");
exit(EXIT_FAILURE);
}
// 创建命名管道B到A
if (mkfifo(FIFO_BtoA, 0666) == -1) {
perror("mkfifo B to A");
exit(EXIT_FAILURE);
}
printf("Named pipes created successfully.\n");
// 打开命名管道A到B以写入数据
fd_write = open(FIFO_AtoB, O_WRONLY);
if (fd_write == -1) {
perror("open write");
exit(EXIT_FAILURE);
}
// 打开命名管道B到A以读取数据
fd_read = open(FIFO_BtoA, O_RDONLY);
if (fd_read == -1) {
perror("open read");
exit(EXIT_FAILURE);
}
while (1) {
// 读取用户输入
printf("Process A, enter message: ");
fgets(buffer, BUFFER_SIZE, stdin);
// 向进程B发送数据
write(fd_write, buffer, strlen(buffer) + 1);
printf("Process A sent: %s\n", buffer);
// 检查终止条件
if (strcmp(buffer, "exit\n") == 0) {
break;
}
// 从进程B读取数据
read(fd_read, buffer, BUFFER_SIZE);
printf("Process A received: %s\n", buffer);
// 检查终止条件
if (strcmp(buffer, "exit\n") == 0) {
break;
}
count++;
}
// 关闭命名管道
close(fd_write);
close(fd_read);
// 删除命名管道
unlink(FIFO_AtoB);
unlink(FIFO_BtoA);
return 0;
}
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#define FIFO_AtoB "fifo_a_to_b"
#define FIFO_BtoA "fifo_b_to_a"
#define BUFFER_SIZE 1024
int main() {
int fd_write, fd_read;
char buffer[BUFFER_SIZE];
int count = 0;
// 打开命名管道A到B以读取数据
while ((fd_read = open(FIFO_AtoB, O_RDONLY)) == -1) {
perror("open read");
sleep(1); // 等待管道创建
}
// 打开命名管道B到A以写入数据
while ((fd_write = open(FIFO_BtoA, O_WRONLY)) == -1) {
perror("open write");
sleep(1); // 等待管道创建
}
while (1) {
// 从进程A读取数据
read(fd_read, buffer, BUFFER_SIZE);
printf("Process B received: %s\n", buffer);
// 检查终止条件
if (strcmp(buffer, "exit\n") == 0) {
break;
}
// 读取用户输入
printf("Process B, enter message: ");
fgets(buffer, BUFFER_SIZE, stdin);
// 向进程A发送数据
write(fd_write, buffer, strlen(buffer) + 1);
printf("Process B sent: %s\n", buffer);
// 检查终止条件
if (strcmp(buffer, "exit\n") == 0) {
break;
}
count++;
}
// 关闭命名管道
close(fd_read);
close(fd_write);
return 0;
}
3.内存映射区
存储映射I/O (Memory-mapped I/O) 使一个磁盘文件与存储空间中的一个缓冲区相映射。从缓冲区中取数据,就相当于读文件中的相应字节;将数据写入缓冲区,则会将数据写入文件。这样,就可在不使用read和write函数的情况下,使用地址(指针)完成I/O操作。使用存储映射这种方法,首先应通知内核,将一个指定文件映射到存储区域中。这个映射工作可以通过mmap函数来实现。

示例代码:使用mmap完成父子进程间通信

#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <string.h>
#include <sys/wait.h>
#define FILE_PATH "mapped_file.txt"
#define FILE_SIZE 4096
int main() {
int fd;
char *mapped_memory;
// 创建或打开文件,并设置文件大小
fd = open(FILE_PATH, O_RDWR | O_CREAT, 0666);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
if (ftruncate(fd, FILE_SIZE) == -1) {
perror("ftruncate");
exit(EXIT_FAILURE);
}
// 创建存储映射区
mapped_memory = mmap(NULL, FILE_SIZE, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
if (mapped_memory == MAP_FAILED) {
perror("mmap");
exit(EXIT_FAILURE);
}
// 关闭文件描述符
close(fd);
// 创建子进程
pid_t pid = fork();
if (pid == -1) {
perror("fork");
exit(EXIT_FAILURE);
}
if (pid == 0) {
// 子进程
printf("Child process reading from memory-mapped file: %s\n", mapped_memory);
// 修改映射区中的数据
strcpy(mapped_memory, "Hello from Child Process!");
exit(EXIT_SUCCESS);
} else {
// 父进程
// 写入数据到映射区
strcpy(mapped_memory, "Hello from Parent Process!");
// 等待子进程完成
wait(NULL);
// 再次读取子进程修改后的数据
printf("Parent process reading from memory-mapped file: %s\n", mapped_memory);
// 释放存储映射区
if (munmap(mapped_memory, FILE_SIZE) == -1) {
perror("munmap");
exit(EXIT_FAILURE);
}
}
return 0;
}
示例代码:使用mmap完成没有血缘关系的进程间通
写进程
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <unistd.h>
#include <string.h>
#define FILE_PATH "shared_file.txt"
#define FILE_SIZE 4096
int main() {
int fd;
char *mapped_memory;
// 打开文件,创建并设置大小
fd = open(FILE_PATH, O_RDWR | O_CREAT, 0666);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
if (ftruncate(fd, FILE_SIZE) == -1) {
perror("ftruncate");
close(fd);
exit(EXIT_FAILURE);
}
// 创建存储映射区
mapped_memory = mmap(NULL, FILE_SIZE, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
if (mapped_memory == MAP_FAILED) {
perror("mmap");
close(fd);
exit(EXIT_FAILURE);
}
// 写入数据到映射区
strcpy(mapped_memory, "Hello from Process 1!");
// 保持程序运行一段时间,以便进程2读取
sleep(30);
// 解除映射
if (munmap(mapped_memory, FILE_SIZE) == -1) {
perror("munmap");
close(fd);
exit(EXIT_FAILURE);
}
// 关闭文件
close(fd);
return 0;
}
读进程:
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <unistd.h>
#include <string.h>
#define FILE_PATH "shared_file.txt"
#define FILE_SIZE 4096
int main() {
int fd;
char *mapped_memory;
// 打开文件
fd = open(FILE_PATH, O_RDWR);
if (fd == -1) {
perror("open");
exit(EXIT_FAILURE);
}
// 创建存储映射区
mapped_memory = mmap(NULL, FILE_SIZE, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
if (mapped_memory == MAP_FAILED) {
perror("mmap");
close(fd);
exit(EXIT_FAILURE);
}
// 读取映射区中的数据
printf("Process 2 reads: %s\n", mapped_memory);
// 修改映射区中的数据
strcpy(mapped_memory, "Hello from Process 2!");
// 保持程序运行一段时间,以便进程1看到修改
sleep(30);
// 解除映射
if (munmap(mapped_memory, FILE_SIZE) == -1) {
perror("munmap");
close(fd);
exit(EXIT_FAILURE);
}
// 关闭文件
close(fd);
return 0;
}