😊😊🤣
怕什么真理无穷,进一步有进一步的欢喜。
一、安装ros2-humble版本
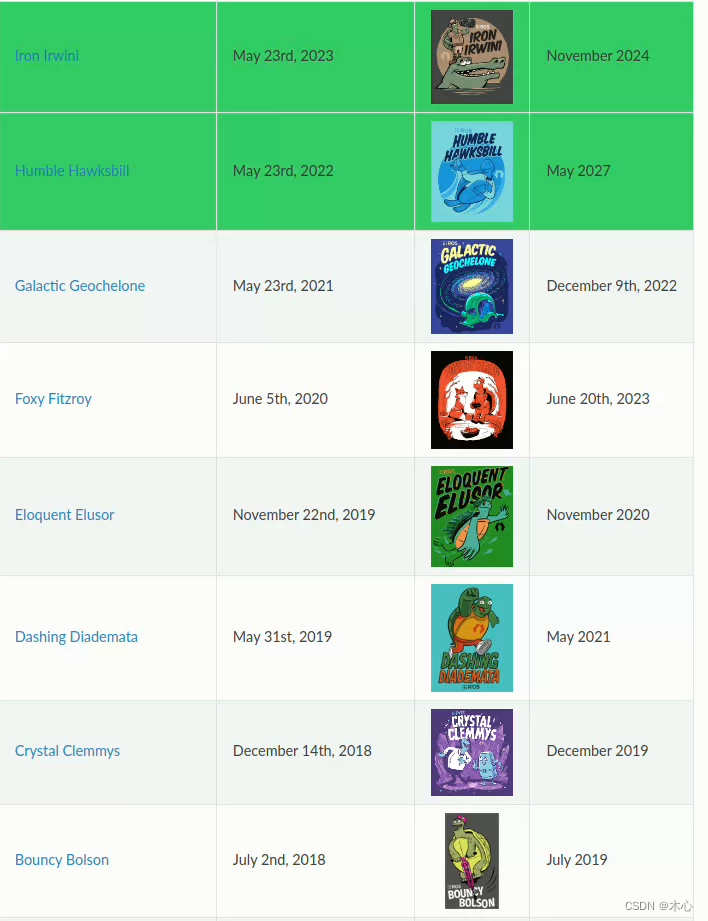
目前ros2对应的版本有很多,包括foxy,humble,jazzy,Iron。不同版本各有优缺点。官网上有很详细的说明。
本次安装的主要是humble版本的ros2。遇到一些问题,这里抛出来,防止后面有人继续踩坑。ros2的humble需要的操作系统为unbuntu22.04版本的,如果是unbuntu20.04,会安装不成功。至于unbuntu24版本的,并没有试过。以后有时间抽空下载一下。
对应的安装教程:
Ubuntu (Debian packages) — ROS 2 Documentation: Humble documentation
大致的流程:
1.检查是不是支持utf-8格式
2.配置ros2的存储环境
3.安装ros2
4.配置环境变量
5.运行一下代码,检查ros2是否安装成功
二、配置一些环境变量
前言:因为很久没有使用unbuntu操作系统,在命令行中使用命令进行操作设置环境变量等尤其不熟悉。所以把一些对于新手可能会用到的一些快捷命令放到这里,可以方便操作。
| ctrl+alt+t | 快速打开终端 |
| ctrl+shift+c | 复制 |
| ctrl+shift+v | 粘贴 |
因为ros2的代码需要在有ros2的环境下才能运行,但是每次的ros2的环境的配置需要一段比较长的命令:source /opt/ros/humble/setup.bash来运行,并且每次打开一个新的终端,就需要重新配置,费时费手。
鉴于此,可以将这段命令写入环境变量,减少工作量。具体的方法,可以随便打开一个终端,首先运行第1条命令,在运行第二条命令。之后再试着运行ros2 run demo_nodes_cpp talker
命令。同时为了检验其实际作用,可以另外打开一个终端,不输入下面的第1条语句,直接运行黄色的命令,可以发现运行是成功的。
1.source /opt/ros/humble/setup.bash
2.echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
三、使用turtlesim 和 rqt 来控制乌龟
学了这么多语言,发现乌龟确实是很多外国人拿来做编程画图的一个小工具。
3.1 使用turtlesim控制乌龟
需要打开两个窗口:
1.ros2 run turtlesim turtlesim_node
该命令是打开一个窗口,里面会有一只乌龟,但是无论操作键盘还是鼠标,这只乌龟是
不会动的。(ps:乌龟的种类会根据命令随机分配,所以如果看到每次生成的乌龟不一样,
也不用担心。)
2.ros2 run turtlesim turtle_teleop_key
这段命令的作用是控制乌龟的动作,是要在另外一个终端下打开的,不能在上个终端运
行。这里确实涉及到通信的知识,什么ROS_DOMAIN之类的,据说不在同一个
ROS_DOMAIN_ID下的终端是不能操控的。
之后,就可以根据方向键来操控乌龟,上下箭头控制乌龟的前进和后退,左右箭头控制
乌龟头部的朝向。键盘上的ERTGBVCD分别代表的是八个方向。
| E | 西北 |
| R | 正北 |
T |
东北 |
| G | 正东 |
| B | 东南 |
| V | 正南 |
| C | 西南 |
| D | 正西 |
ps:这里我在虚拟机上运行的时候总是出现,跑着跑着界面就没有任何反应了,卡住不动,鼠标动不了,键盘都不了,只能看到一张静态的页面。😂
3.2 使用rqt来控制乌龟
毕竟使用命令行的操作来控制乌龟的颜色,动作属性等还是不太直观,所以就引入rqt这
种图形化软件。
具体的安装流程在这个文档。Using turtlesim, ros2, and rqt — ROS 2 Documentation: Humble documentation
特点:
1.使用这个图形化窗口,可以在图形化界面中直接创建新的乌龟。一般都是放在左
下角,并且新创建的乌龟和之前的乌龟是在同一个窗口中的。
2.可以设置乌龟背后的钢笔画出的轨迹的长度和宽度,颜色等属性
下章:ros2的节点和话题、服务和参数学习