一、设计描述
本设计精心构建了一个以STM32MP157A高性能单片机为核心控制单元的综合性嵌入式系统。该系统巧妙融合了蜂鸣器、数码管显示器、点阵屏、温湿度传感器、LED指示灯以及按键等多种外设模块,形成了一个功能丰富、操作便捷的杂交版智能设备。通过串口通信,用户可以灵活地切换系统的工作模式,轻松实现闹钟、音乐盒播放及温湿度监测与调控等基本功能。
核心硬件
- 主控单元:采用STM32MP157A单片机,凭借其强大的处理能力和丰富的外设接口,为系统提供了坚实的硬件基础。
软件平台
- 开发工具:利用STM32CUBEIDE这一直观易用的集成开发环境,极大地提升了软件编程与调试的效率,确保了系统软件的稳定可靠。
系统功能亮点
模式灵活切换:通过串口通信,用户可以轻松地在闹钟、音乐盒播放及温湿度监测三种模式之间自由切换,满足不同场景下的使用需求。
动态信息显示:点阵屏作为系统的信息展示窗口,能够根据当前的工作模式显示相应的汉字(如“钟”代表闹钟模式,“音”代表音乐盒模式,“传”可视为温湿度监测的简化标识),为用户提供了直观的操作反馈。
按键交互体验:设计中充分考虑了用户的交互体验,通过按键即可在各模式下执行对应的功能操作,如音乐盒的速度与音量调节、歌曲切换、暂停/播放控制,以及闹钟的时间调整、设置多个闹钟、关闭闹钟等。
温湿度智能调控:系统内置温湿度传感器,能够实时监测环境状况,并通过串口接收用户指令调节温湿度的上下限阈值。一旦环境参数超出设定范围,LED指示灯将亮起作为边界提示,帮助用户及时采取措施。
二、基本配置信息
音乐盒在之前做过所以配置不做改变:STM32音乐盒

三、STM32CUBEIDE配置
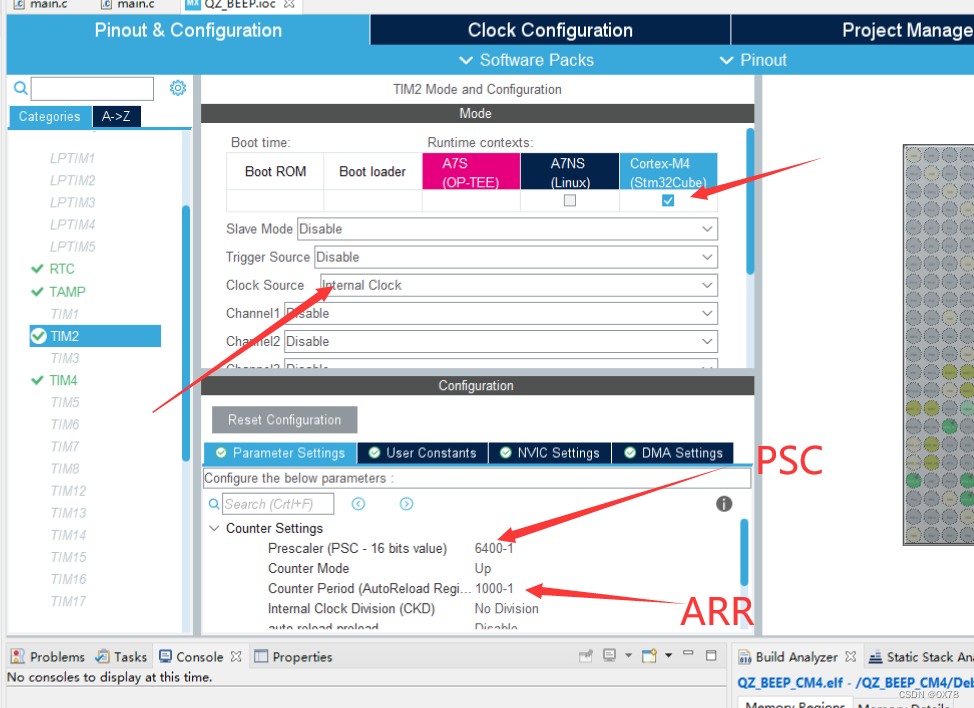
1、定时器--100ms
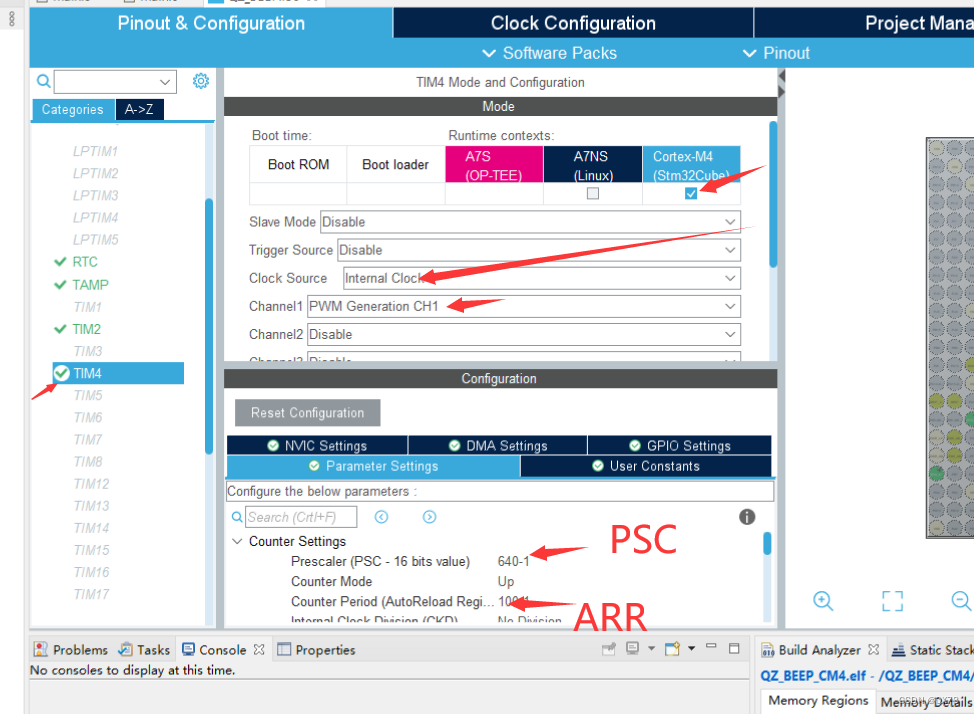
2、PWM配置(蜂鸣器 -- PB6)
3. 串口配置

注意针脚

4. IIC配置(温湿度,数码管,点阵屏)


5. GPIO配置(LED和按键)

6. NVIC

四、程序编写
(1)音乐盒代码
音乐盒在之前已经写过,所以这里不再重复之前的操作,我们将串口和模式转换加进去。
串口音乐控制函数
//串口音乐控制函数
void music_kz(){
if(EN_music == 1)//启动
play_music(list,Low_volume);
else
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
if(strcmp("music volume increase",(char *)uart4_data)==0){
uart4_data[0] = '0';
Low_volume = Low_volume + Low_volume_cnt;
if(Low_volume >= 10)
Low_volume = 10;
}
if(strcmp("music volume reduction",(char *)uart4_data)==0){
Low_volume = Low_volume - Low_volume_cnt;
if(Low_volume <= 0)
Low_volume = 0;
}
if(strcmp("music speed increase",(char *)uart4_data)==0){
uart4_data[0] = '0';
music_speed_i++;
music_speed_i = music_speed_kz(music_speed_i);
}
if(strcmp("music speed reduction",(char *)uart4_data)==0){
uart4_data[0] = '0';
music_speed_i--;
music_speed_i = music_speed_kz(music_speed_i);
}
if(strcmp("music next song",(char *)uart4_data)==0){
uart4_data[0] = '0';
list++;
if(list > list_max){
list = list_max;
}
}
if(strcmp("music previous song",(char *)uart4_data)==0){
list--;
uart4_data[0] = '0';
if(list < 0){
list = 0;
}
}
if(strcmp("music start",(char *)uart4_data)==0){
EN_music = 1;
}
if(strcmp("music stop",(char *)uart4_data)==0){
EN_music = 0;
}
}
按键模式控制
用mode变量代表模式,后面三个按键同理。
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
{
//每次按下解决 音量�??????? Low_volume_cnt
Low_volume = Low_volume + Low_volume_cnt;
if(Low_volume >= 10)
Low_volume = 0;
}
if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
shi_clock++;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
if(shi_clock>=24)
{
shi_clock=0;
}
miao_shi_clock=miao_clock/10;
miao_ge_clock=miao_clock%10;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
buf[0]=smg_number[shi_shi_clock];
buf[1]=smg_number[shi_ge_clock];
buf[3]=smg_number[fen_shi_clock];
buf[4]=smg_number[fen_ge_clock];
buf[6]=smg_number[miao_shi_clock];
buf[7]=smg_number[miao_ge_clock];
}
/* USER CODE END EXTI0_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}
(2)模式切换
mode变量切换
void uart_mode(){
if(strcmp("mode = music",(char *)uart4_data)==0){
mode = 0;
}
if(strcmp("mode = clock",(char *)uart4_data)==0){
mode = 1;
}
if(strcmp("mode = sensor",(char *)uart4_data)==0){
mode = 2;
}
}点阵屏字库
uint8_t DZP_data[6][34]={
{0xAA,0x55,
0xFD,0xFF,0xFE,0xFF,0xC0,0x07,0xFF,0xFF,0xF7,0xDF,0xFB,0xBF,0x00,0x01,0xFF,0xFF,
0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF},//音
{0xAA,0x55,
0xEF,0xDF,0xEF,0xDF,0xC3,0xDF,0xDF,0xDF,0xBE,0x03,0x42,0xDB,0xEE,0xDB,0xEE,0xDB,
0x02,0xDB,0xEE,0x03,0xEE,0xDB,0xEF,0xDF,0xEB,0xDF,0xE7,0xDF,0xEF,0xDF,0xFF,0xDF},//钟//1//
{0xAA,0x55,
0xF7,0xBF,0xF7,0xBF,0xF7,0xBF,0xEC,0x07,0xEF,0xBF,0xCF,0x7F,0xC8,0x01,0xAF,0x7F,
0x6E,0xFF,0xEC,0x07,0xEF,0xF7,0xEE,0xEF,0xEF,0x5F,0xEF,0xBF,0xEF,0xDF,0xEF,0xDF}//传//2//
};点阵屏显示
if(mode_n != mode){
mode_n = mode;
for(int i = 0; i<34;i++){
//printf("afgsbgafdffag");
HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
HAL_Delay(2);
}
}(3)闹钟代码编写
1. 基础变量
main.c
//数码管闹钟基础变量
extern int buf[8];
extern int shi_shi;
extern int shi_ge ;
extern int fen_shi;
extern int fen_ge ;
extern int miao_shi ;
extern int miao_ge ;
extern int miao ;
extern int shi ;
extern int fen;
//闹钟保存数组
extern int alarm_clock_array[20][4];
extern int alarm_clock_array_cnt;stm32mp1xx_it.c 基础变量
//数码管闹钟基础设置
int smg_number[10] = {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xE0,0xFE,0xF6};
int buf[8] = {0};
//闹钟保存数组
int alarm_clock_array[20][4] = {0};
int alarm_clock_array_cnt = 0;
//实时时钟信息
int shi_shi = 0;
int shi_ge = 0;
int fen_shi = 0;
int fen_ge = 0;
int miao_shi = 0;
int miao_ge = 0;
int miao = 0;
int shi = 0;
int fen = 0;
int EN_clock = 0;//闹钟设置使能
extern int en_clock;//用于控制闹钟响铃
//闹钟设置信息
int shi_shi_clock = 0;
int shi_ge_clock = 0;
int fen_shi_clock = 0;
int fen_ge_clock = 0;
int miao_shi_clock = 0;
int miao_ge_clock = 0;
int miao_clock = 0, shi_clock = 0, fen_clock = 0;
2. TIM2定时器
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
if(EN_music == 1)
time_100ms_cnt++;
else
time_100ms_cnt = time_100ms_cnt; //其余状�?�不计数
if(time_100ms_cnt >= Beat_speed_n * Beat_num){ //这个音节结束
time_100ms_cnt = 0;
flag = 1; //发�?�音节结束信�???????
}
//数码�????
static int smg_time_100ms = 0;
smg_time_100ms++;
if(smg_time_100ms>=10){
miao++;
smg_time_100ms = 0;
}
if (miao>=60)
{
miao=0;
fen++;
if(fen>=60)
{
fen=0;
shi++;
if(shi>=24)
{
shi=0;
}
}
}
if(miao >= 60){
miao = miao-60;
fen++;
}
if(fen>=60){
fen = fen-60;
shi ++;
}
if(shi>= 24){
shi = shi -24;
}
miao_shi=miao/10;
miao_ge=miao%10;
fen_shi=fen/10;
fen_ge=fen%10;
shi_shi=shi/10;
shi_ge=shi%10;
if(EN_clock == 0){
buf[0]=smg_number[shi_shi];
buf[1]=smg_number[shi_ge];
buf[3]=smg_number[fen_shi];
buf[4]=smg_number[fen_ge];
buf[6]=smg_number[miao_shi];
buf[7]=smg_number[miao_ge];
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_RESET);
//HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
//HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
}
else{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_SET);
//HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
//HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_SET);
}
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
3. 按键控制设置闹钟和保存闹钟
void EXTI9_IRQHandler(void)
{
/* USER CODE BEGIN EXTI9_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 0){//确保数据稳定
EN_music = !EN_music;
}
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 1 ){//确保数据稳定
if(EN_clock == 1){
//闹钟设置成功
alarm_clock_array[alarm_clock_array_cnt][0] = shi_clock;
alarm_clock_array[alarm_clock_array_cnt][1] = fen_clock;
alarm_clock_array[alarm_clock_array_cnt][2] = miao_clock;
alarm_clock_array[alarm_clock_array_cnt][3] = 3; //默认播放第三首音�????
alarm_clock_array_cnt++;
if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
EN_clock = 0;
}
else if(EN_clock == 0){
//设置闹钟
shi_shi_clock = shi_shi;
shi_ge_clock = shi_ge;
fen_shi_clock = fen_shi;
fen_ge_clock = fen_ge;
miao_shi_clock = 0;
miao_ge_clock = 0;
miao_clock = 0;
shi_clock = shi;
fen_clock = fen;
EN_clock = 1;
}
}
/* USER CODE END EXTI9_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_9);
/* USER CODE BEGIN EXTI9_IRQn 1 */
/* USER CODE END EXTI9_IRQn 1 */
}
4. 时分按键+
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
{
//每次按下解决 音量�??????? Low_volume_cnt
Low_volume = Low_volume + Low_volume_cnt;
if(Low_volume >= 10)
Low_volume = 0;
}
if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
shi_clock++;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
if(shi_clock>=24)
{
shi_clock=0;
}
miao_shi_clock=miao_clock/10;
miao_ge_clock=miao_clock%10;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
buf[0]=smg_number[shi_shi_clock];
buf[1]=smg_number[shi_ge_clock];
buf[3]=smg_number[fen_shi_clock];
buf[4]=smg_number[fen_ge_clock];
buf[6]=smg_number[miao_shi_clock];
buf[7]=smg_number[miao_ge_clock];
}
/* USER CODE END EXTI0_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}
/**
* @brief This function handles EXTI line1 interrupt.
*/
void EXTI1_IRQHandler(void)
{
/* USER CODE BEGIN EXTI1_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_1) == 0 && mode == 0)//确保数据稳定
{
music_speed_i++;
music_speed_i = music_speed_kz(music_speed_i);
}
if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_1)==GPIO_PIN_RESET && mode == 1) {
fen_clock++;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
if(fen_clock>=60)
{
fen_clock=0;
shi_clock++;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
if(shi_clock>=24)
{
shi_clock=0;
}
}
miao_shi_clock=miao_clock/10;
miao_ge_clock=miao_clock%10;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
buf[0]=smg_number[shi_shi_clock];
buf[1]=smg_number[shi_ge_clock];
buf[3]=smg_number[fen_shi_clock];
buf[4]=smg_number[fen_ge_clock];
buf[6]=smg_number[miao_shi_clock];
buf[7]=smg_number[miao_ge_clock];
}
/* USER CODE END EXTI1_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
/* USER CODE BEGIN EXTI1_IRQn 1 */
/* USER CODE END EXTI1_IRQn 1 */
}
/**
* @brief This function handles EXTI line2 interrupt.
*/
void EXTI2_IRQHandler(void)
{
/* USER CODE BEGIN EXTI2_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_2) == 0 && mode == 0)//确保数据稳定
{
list++;
if(list > list_max){
list = 0;
}
}
if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_2)==GPIO_PIN_RESET && mode == 1) {
//在此处关闭闹�????
en_clock = 0;
}
/* USER CODE END EXTI2_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_2);
/* USER CODE BEGIN EXTI2_IRQn 1 */
/* USER CODE END EXTI2_IRQn 1 */
}
5. 时钟相加函数(将后三的时分秒加入左三的对应时分秒)
//通过输入不同的n,返回shi fen miao
int clock_compute(int time_shi,int time_fen,int time_miao,int add_shi,int add_fen,int add_miao,int n){
time_miao = time_miao + add_miao;
time_fen = time_fen + time_miao/60;
time_miao = time_miao % 60;
time_fen = time_fen + add_fen;
time_shi = time_shi + time_fen / 60;
time_fen = time_fen%60;
time_shi = time_shi + add_shi;
time_shi = time_shi%24;
if(n == 0) return time_shi;
if(n == 1) return time_fen;
if(n == 2) return time_miao;
return -1;
}
6. 提取对应字符串后两位数字
// 函数定义:从字符串中提取两位数字
int extract_two_digits(const char *str, const char *prefix, int *value) {
char *pos = strstr(str, prefix); // 查找前缀的位�?????
if (pos == NULL) return 0; // 如果没找到前�?????,返�?????0表示失败
// 跳过前缀的长度,找到数字�?????始的位置
pos += strlen(prefix);
// �?????查接下来的两个字符是否是数字
if (pos[0] >= '0' && pos[0] <= '9' && pos[1] >= '0' && pos[1] <= '9') {
// 转换字符为数�?????
*value = (pos[0] - '0') * 10 + (pos[1] - '0');
return 1; // 成功提取,返�?????1
}
return 0; // 提取失败,返�?????0
}7. 串口设置目前时钟,定时闹钟,延时闹钟
//判断是否到底闹钟
int en_clock = 0;//用于控制闹钟响铃
int en_clock_cnt = 0;
int clock_end[3] = {0};//记录闹钟无人时关闭的时间
//串口设置闹钟
void uart_clock(){
int ci = 0;
int ci_n = 0;
//ci = number_char_come(uart4_data,(uint8_t *)"clock shi = ",2);
ci = extract_two_digits((char *)uart4_data, (char *)"clock shi = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
shi = ci_n;
}
//ci = number_char_come(uart4_data,(uint8_t *)"clock fen = ",2);
ci = extract_two_digits((char *)uart4_data, (char *)"clock fen = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
fen = ci_n;
}
//ci = number_char_come(uart4_data,(uint8_t *)"clock miao = ",2);
ci = extract_two_digits((char *)uart4_data, (char *)"clock miao = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
miao = ci_n;
}
//设置�?????个多少时间后的闹�?????
//ci = number_char_come(uart4_data,(uint8_t *)"clock delay shi = ",2);
ci = extract_two_digits((char *)uart4_data, "clock delay shi = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,ci_n,0,0,0);
alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,ci_n,0,0,1);
alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,ci_n,0,0,2);
alarm_clock_array_cnt++;
}
//ci = number_char_come(uart4_data,(uint8_t *)"clock delay fen = ",2);
ci = extract_two_digits((char *)uart4_data, "clock delay fen = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,ci_n,0,0);
alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,ci_n,0,1);
alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,ci_n,0,2);
alarm_clock_array_cnt++;
}
ci = extract_two_digits((char *)uart4_data, "clock delay miao = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,0,ci_n,0);
alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,0,ci_n,1);
alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,0,ci_n,2);
alarm_clock_array_cnt++;
}
// time shi = 12;fen = 10;miao = 12;music = 1;
ci = 0;
ci = ci + extract_two_digits((char *)uart4_data, "time shi = ", &alarm_clock_array[alarm_clock_array_cnt][0]);
ci = ci + extract_two_digits((char *)uart4_data, ";fen = ", &alarm_clock_array[alarm_clock_array_cnt][1]);
ci = ci + extract_two_digits((char *)uart4_data, ";miao = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
//ci = ci + extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
if(ci == 3){
//完美对应
uart4_data[0] = '1';
ci = extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][3]);
if(ci > list_max && ci<0) //如果大于音乐总数
alarm_clock_array[alarm_clock_array_cnt][3] = 3;//默认�?????3
alarm_clock_array_cnt++;
}
if(strcmp("clock delay list",(char *)uart4_data)==0){
uart4_data[0] = '0';
for(int i = 0; i< alarm_clock_array_cnt;i++){
if(alarm_clock_array[i][0] != -1 && alarm_clock_array[i][1] != -1 && alarm_clock_array[i][2] != -1)
printf("%d : time -> %d/%d/%d \r\n",i, alarm_clock_array[i][0],
alarm_clock_array[i][1],
alarm_clock_array[i][2]
);
}
}
//读取关闭第几位闹�?????
//ci = number_char_come(uart4_data,(uint8_t *)"clock stop list = ",2);
ci = extract_two_digits((char *)uart4_data, "clock stop list = ", &ci_n);
if(ci == 1){
alarm_clock_array[ci_n][0] = -1;
alarm_clock_array[ci_n][1] = -1;
alarm_clock_array[ci_n][2] = -1;
}
//关闭闹钟
if(strcmp("clock stop stop",(char *)uart4_data)==0){
en_clock = 0;
}
if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
}8. 闹钟实现和停止(数码管显示)
void alarm_clock(){
//时钟显示(数码管)
static int pos = 0;
HAL_I2C_Mem_Write(&hi2c1,0x70,0X10+pos, 1, (uint8_t*)&buf[pos],1,100);
HAL_Delay(1);
pos++;
if(pos == 3 && pos == 6) pos++;
if(pos == 8) pos = 0;
uart_clock();//调用串口控制
for(int j=0;j<alarm_clock_array_cnt && en_clock == 0;j++){
//int cnt_clock = 0;
if(alarm_clock_array[j][0] == shi && alarm_clock_array[j][1] == fen && alarm_clock_array[j][2] == miao) {
en_clock_cnt = j;
en_clock = 1;
clock_end[0] = clock_compute(shi,fen,miao,0,0,30,0);
clock_end[1] = clock_compute(shi,fen,miao,0,0,30,1);
clock_end[2] = clock_compute(shi,fen,miao,0,0,30,2);
break;
}
}
//当闹钟响�?????30S
if(shi == clock_end[0] && fen == clock_end[1] && miao == clock_end[2]){
en_clock = 0;//关闭闹钟
//EN_music = 1;
}
if(en_clock == 1 ){
motor(10);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
}
else{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_6, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
}
}(4)温湿度代码编写
1. 温湿度基础变量
uint8_t add1=0xFE,add2=0xE5,add3=0xE3;
//0xFE复位 0xE5启动湿度转换 0xE3启动温度转换
uint16_t RH_Code,RH_Code_low=0,RH_Code_high=0;
uint16_t Temp_Code,Temp_Code_low=0,Temp_Code_high=0;
int humidity_min = 50;//能仍受最低干燥程度
int temperature_max = 50;//能仍受的最高温度
int en_t = 0; //温度使能
int en_r = 0; //湿度使能2. 温湿度计算
//计算出温湿度
void Temperature_humidity(){
//湿度
HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add2, 1,100);
//写命�??????? ox40里面写命�??????? 0xe5 启动湿度转换
HAL_I2C_Master_Receive(&hi2c1, 0x81, &RH_Code, 1, 100);
//读命�??????? �???????0x40读取出湿度的数据 存入变量RH_CODE
HAL_Delay(30);
//进行高低字节转换
RH_Code_low=(RH_Code & 0xff);
RH_Code_high=(RH_Code >> 8)& 0xff;
RH_Code=(RH_Code_low << 8)+RH_Code_high;
//温度
HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add3, 1,100);
HAL_I2C_Master_Receive(&hi2c1, 0x81, &Temp_Code, 1, 100);
//读命�??????? �???????0x40读取出温度的数据 存入变量Temp_CODE
HAL_Delay(30);
//进行高低字节转换
Temp_Code_low=(Temp_Code & 0xff);
Temp_Code_high=(Temp_Code >> 8)& 0xff;
Temp_Code=(Temp_Code_low << 8)+Temp_Code_high;
Temp_Code=17572*Temp_Code/65535-4685;//扩大�???????百�??
RH_Code=125*RH_Code/65536-6;//计算出湿度�??
//printf("Temp_Code = \r%d.%d RH_Code = %d%%\n",Temp_Code/100,Temp_Code%100,RH_Code%100);
//串口输出温湿�???????
HAL_Delay(2);
}
3. 温湿度串口控制
void uart_sensor(){
int tr=0;
int tr_i = 0;
tr = extract_two_digits((char *)uart4_data, "sensor humidity_min = ", &tr_i);
if(tr != 0){
humidity_min = tr_i;
}
tr = extract_two_digits((char *)uart4_data, "sensor temperature_max = ", &tr_i);
if(tr != 0){
temperature_max = tr_i;
}
if(strcmp("sensor temperature start",(char *)uart4_data)==0){
en_t = 1;
}
if(strcmp("sensor humidity start",(char *)uart4_data)==0){
en_r = 1;
}
if(strcmp("sensor temperature stop",(char *)uart4_data)==0){
en_t = 0;
}
if(strcmp("sensor humidity stop",(char *)uart4_data)==0){
en_r = 0;
}
if(strcmp("sensor list",(char *)uart4_data)==0){
uart4_data[0] = '0';
printf("Temp_Code = \r%d.%d RH_Code = %d%%\r\n",Temp_Code/100,Temp_Code%100,RH_Code%100);
printf("sensor en_t : %d\r\n",en_t);
printf("sensor en_r : %d\r\n",en_r);
printf("sensor temperature_max : %d\r\n",temperature_max);
printf("sensor humidity_min : %d\r\n",humidity_min);
}
if(strcmp("sensor Temp_Code RH_Code",(char *)uart4_data)==0){
uart4_data[0] = '0';
printf("Temp_Code = \r%d.%d RH_Code = %d%%\n",Temp_Code/100,Temp_Code%100,RH_Code%100);
}
}4. 温湿度主函数
void sensor(){
static int iii = 0;
if(iii == 0){
HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add1, 1, 100);
HAL_Delay(2);
iii++;
}
Temperature_humidity();
uart_sensor();
if(RH_Code < humidity_min && en_r == 1){
//motor(10);
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_SET);
}
else{
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_RESET);
}
if(Temp_Code/100 >= temperature_max && en_t == 1){
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_SET);
}
else{
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_RESET);
}
}(5)主函数
void end_main(){
tone_init(); //初始化音量频�??????
list_max = music_init();//更新乐谱
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); //启动蜂鸣器定时器
HAL_TIM_Base_Start_IT(&htim2); //启动定时�??????2
HAL_TIM_Base_Start_IT(&htim3); //启动定时�??????2
//1 使能串口空闲中断
__HAL_UART_ENABLE_IT(&huart4,UART_IT_IDLE);
//2.使能串口中断接收数据
HAL_UART_Receive_IT(&huart4,rx_buf,sizeof(rx_buf));
int mode_n = 1;
while(1){
music_kz();
alarm_clock();
uart_mode();
sensor();
if(mode_n != mode){
mode_n = mode;
for(int i = 0; i<34;i++){
//printf("afgsbgafdffag");
HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
HAL_Delay(2);
}
}
}
}五、总代码
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2024 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
uint8_t rx_buf[200]={0}; //接收不定长数
uint8_t uart4_data[200] = {0};
extern int mode; //模式
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim4;
UART_HandleTypeDef huart4;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM4_Init(void);
static void MX_UART4_Init(void);
static void MX_TIM3_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//重写标准输出函数
int __io_putchar(int ch)
{
HAL_UART_Transmit(&huart4, (uint8_t *)&ch, 1, 10);
return ch;
}
// 自定义空闲中断处理函�????????
void uart4_idle_func(void)
{
int len = 0;
//判定 是否为空闲中�????????
if( __HAL_UART_GET_FLAG(&huart4, UART_FLAG_IDLE) == SET )
{
// 清除空闲中断标志,因为是自己定义的函数 系统不会清标
__HAL_UART_CLEAR_IDLEFLAG(&huart4);
// 计算接收数据的长
len = sizeof(rx_buf) - huart4.RxXferCount;
//第二个参数是 还剩下的空间
// 打印接收到时数据 数据处理
//printf("uart rx len = %d, data: %s\r\n",len, rx_buf);
// 使用strcpy复制字符�????????
strcpy((char *)uart4_data, (char *)rx_buf);
printf("%s instructions success\r\n", uart4_data);
// 准备接收下一次数�?????????
memset(rx_buf,0,len); // 清理接收容器
//重置接收指针 剩余容器大小
huart4.pRxBuffPtr = rx_buf;
huart4.RxXferCount = sizeof(rx_buf);
}
}
//控制马达
void motor(int d){
HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_6);//
HAL_Delay(d);
}
// 音乐
// 音乐盒基�??????变量
extern int time_100ms_cnt; //0.1s计数�??????
extern int Beat_speed; //节拍速度,代表半个节拍需要多少个0.1s
extern int Beat_speed_n; //实际执行的节拍数
extern int Beat_num; //这个�??????个音�??????要多少个 半拍
extern int flag; //当其等于 1 时,表示�??????个音结束
extern int EN_music ; //使能信号,用于开启整个音乐盒
extern int list ; //音乐列表
extern int list_max ; //音乐总数
extern int Low_volume ; //音量大小
extern int Low_volume_cnt;
extern int music_speed_i; //音乐播放速度模式保存
extern int music_speed_kz(int i);
int tone[3][8];
//初始化高中低音频�??????
void tone_init(){
tone[1][0] = 0; //不执行音�??????
tone[1][1] = 191;
tone[1][2] = 170;
tone[1][3] = 151;
tone[1][4] = 143;
tone[1][5] = 127;
tone[1][6] = 113;
tone[1][7] = 101;
// 低音 (Low)
for (int i = 0; i < 8; i++) {
tone[0][i] = tone[1][i] * 2; // 只是低音 近似的�??
}
// 高音 (High)
for (int i = 0; i < 8; i++) {
tone[2][i] = tone[1][i] / 2; // 只是高音 近似的�??
}
}
#define MAX_unit_num 200 //�????????大乐谱数�????????
//创建结构体保存乐�????????
struct music_unit{
char name[50]; //乐谱名称
int unit[MAX_unit_num]; //发什么音
int unit_HL[MAX_unit_num]; //发高音或者其�????????
int time[MAX_unit_num]; //发音时间
//int time_4[MAX_unit_num]; //判断是否�????????1/4�????????
int num; //记录有多少个
}music[25];
//创建乐谱 返回有多少首音乐
int music_init(){
int cnt = 0;
//第一首音�???????? 生日快乐
strcpy(music[0].name, "生日快乐"); // 使用strcpy复制字符�???????? 给音乐命�????????
int music0_unit[29] = {0,0, 5,5,6,5,1,7, 5,5,6,5,2,1,
5,5,6,3,1,7, 6,4,4,3,1,2,1,
0,0}; //基础乐谱
int music0_time[29] = {1,1, 1,1,2,2,2,3, 1,1,2,2,2,3,
2,2,2,2,2,2, 2,2,2,2,2,2,3,
1,1}; //乐谱节拍
music[0].num = 29; //乐谱总数
int music0_unit_HL[29] = {1,1,
0,0,0,0,1,0, 0,0,0,0,1,1,
0,0,1,1,1,0, 0,1,1,1,1,1,1,
1,1}; //乐谱全为中音
//第二首音�???????? �????????闪一闪亮晶晶
cnt++;
strcpy(music[1].name, "�????????闪一闪亮晶晶"); // 使用strcpy复制字符�???????? 给音乐命�????????
int music1_unit[44] = {0,
1,1,5,5,6,6,5, 4,4,3,3,2,2,1,
5,5,4,4,3,3,2, 5,5,4,4,3,3,2,
1,1,5,5,6,6,5, 4,4,3,3,2,2,1,
0}; //基础乐谱
int music1_time[44] = {2,
2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
2,2,2,2,2,2,3, 2,2,2,2,2,2,3,
2}; //乐谱节拍
int music1_unit_HL[44] =
{1,
1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
1,1,1,1,1,1,1, 1,1,1,1,1,1,1,
1}; //乐谱全为中音
music[1].num = 44; //乐谱总数
//第三首音�???????? 两只老虎
cnt++;
strcpy(music[2].name, "两只老虎"); // 使用strcpy复制字符�???????? 给音乐命�????????
int music2_unit[38] = {0,
1,2,3,1, 1,2,3,1, 3,4,5,5, 3,4,5,5,
5,6,5,4, 3,1,5,6, 5,4,3,1, 1,5,1,1,
1,5,1,1, 0}; //基础乐谱
int music2_time[38] = {2,
1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
0,0,0,0, 1,1,0,0, 0,0,1,1, 1,1,1,2,
1,1,1,2, 2}; //乐谱节拍
int music2_unit_HL[38] =
{1,
1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
1,1,1,1, 1,1,1,1, 1,1,1,1, 1,0,1,1,
1,0,1,1, 1}; //乐谱�???????? 中音
music[2].num = 38; //乐谱总数
//第四首音�???????? 青花瓷片�????????
cnt++;
strcpy(music[3].name, "青花瓷片"); // 使用strcpy复制字符�???????? 给音乐命�????????
int music3_unit[100] = {0,0,0,0, 0,5,5,3, 2,3,6,2, 3,5,3,2, 2,5,5,3,
2,3,5,2, 3,5,2,1, 1,1,2,3, 5,6,5,4, 5,3,3,2,
2,2,1,2, 1,1,2,1, 2,3,5,3, 3,3,5,5, 3,2,3,6,
2,3,5,3, 2,2,5,5, 3,2,3,5, 2,3,5,2, 1,1,1,2,
3,5,6,5, 4,5,3,3, 2,2,5,3, 2,2,2,1, 1,0,0,0}; //基础乐谱
int music3_time[100] = {0,0,0,0, 0,0,0,0, 0,0,1,0, 0,0,0,2, 0,0,0,0,
0,0,1,0, 0,0,0,2, 0,0,0,0, 0,0,0,0, 0,0,0,0,
2,0,0,0, 0,0,0,0, 0,1,0,0, 2,0,0,0, 0,0,0,1,
0,0,0,0, 2,0,0,0, 0,0,0,1, 0,0,0,0, 2,0,0,0,
0,0,0,0, 0,0,0,0, 0,2,0,1, 0,0,0,1, 2,1,1,1}; //乐谱节拍
for(int i =0;i<100;i++)
music3_time[i] = music3_time[i]+1;
int music3_unit_HL[100] =
{ 1,1,1,1, 1,1,1,1, 1,1,0,1, 1,1,1,1, 1,1,1,1,
1,1,0,1, 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1,
1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,1, 1,1,1,0,
1,1,1,1, 1,1,1,1, 1,1,1,0, 1,1,1,1, 1,1,1,1,
1,1,1,1, 1,1,1,1, 1,1,0,1, 1,1,1,1, 1,1,1,1}; //乐谱�???????? 中音
music[3].num = 100; //乐谱总数
for (int i = 0; i < MAX_unit_num; i++) {
//将乐谱保存进结构�????????
if(i<music[0].num){//确保数据正确
music[0].unit[i] =music0_unit[i];
music[0].unit_HL[i] =music0_unit_HL[i];
music[0].time[i] =music0_time[i];
}
//将乐谱保存进结构�????????
if(i<music[1].num){//确保数据正确
music[1].unit[i] =music1_unit[i];
music[1].unit_HL[i] =music1_unit_HL[i];
music[1].time[i] =music1_time[i];
}
//将乐谱保存进结构�????????
if(i<music[2].num){//确保数据正确
music[2].unit[i] =music2_unit[i];
music[2].unit_HL[i] =music2_unit_HL[i];
music[2].time[i] =music2_time[i];
}
//将乐谱保存进结构�????????
if(i<music[3].num){//确保数据正确
music[3].unit[i] =music3_unit[i];
music[3].unit_HL[i] =music3_unit_HL[i];
music[3].time[i] =music3_time[i];
}
}
return cnt;
}
//播放�???? N首音�???? 音量�???? X 0 - 100
void play_music(int n, int x){
static int ni = 0; //用于判断 是否换了音乐
static int cnt = 0; //记录播放到哪�????�???? 音节
if(ni != n ){//如果音乐换了
ni = n;
cnt = 0;
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
HAL_Delay(1000);//
}
//
int value = tone[music[n].unit_HL[cnt]][music[n].unit[cnt]]; //获取频率
if(flag == 1){ //接受到一个音节结�????
flag = 0; //复位
Beat_num = music[n].time[cnt]; //这个音需要多少个半拍
//LED_BEEP(music[n].unit[cnt]); //LED随音节变动�?�变�????
if(music[n].time[cnt] == 0){//如果�???? 1/4�????
Beat_speed_n = Beat_speed /2;
}
else{//如果没有1/4�????
Beat_speed_n = Beat_speed;
}
//if(value != 0)//如果有频率�?�执行,没有者只更新 时间�????
__HAL_TIM_SET_AUTORELOAD(&htim4,value); //自动加载频率�????
cnt ++; //可进行下�????次音�????
if(cnt >= music[n].num){ //如果�????个音节播放完�????
cnt = 0;//重新播放
//__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
//HAL_Delay(500);//
}
}
//__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,x * (value/100));//设置音量
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,(value/10)*x);//设置音量
}
//串口音乐控制函数
void music_kz(){
if(EN_music == 1)//启动
play_music(list,Low_volume);
else
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);//设置音量
if(strcmp("music volume increase",(char *)uart4_data)==0){
uart4_data[0] = '0';
Low_volume = Low_volume + Low_volume_cnt;
if(Low_volume >= 10)
Low_volume = 10;
}
if(strcmp("music volume reduction",(char *)uart4_data)==0){
Low_volume = Low_volume - Low_volume_cnt;
if(Low_volume <= 0)
Low_volume = 0;
}
if(strcmp("music speed increase",(char *)uart4_data)==0){
uart4_data[0] = '0';
music_speed_i++;
music_speed_i = music_speed_kz(music_speed_i);
}
if(strcmp("music speed reduction",(char *)uart4_data)==0){
uart4_data[0] = '0';
music_speed_i--;
music_speed_i = music_speed_kz(music_speed_i);
}
if(strcmp("music next song",(char *)uart4_data)==0){
uart4_data[0] = '0';
list++;
if(list > list_max){
list = list_max;
}
}
if(strcmp("music previous song",(char *)uart4_data)==0){
list--;
uart4_data[0] = '0';
if(list < 0){
list = 0;
}
}
if(strcmp("music start",(char *)uart4_data)==0){
EN_music = 1;
}
if(strcmp("music stop",(char *)uart4_data)==0){
EN_music = 0;
}
}
//数码管闹�?????
extern int buf[8];
extern int shi_shi;
extern int shi_ge ;
extern int fen_shi;
extern int fen_ge ;
extern int miao_shi ;
extern int miao_ge ;
extern int miao ;
extern int shi ;
extern int fen;
//闹钟保存数组
extern int alarm_clock_array[20][4];
extern int alarm_clock_array_cnt;
//通过输入不同的n,返回shi fen miao
int clock_compute(int time_shi,int time_fen,int time_miao,int add_shi,int add_fen,int add_miao,int n){
time_miao = time_miao + add_miao;
time_fen = time_fen + time_miao/60;
time_miao = time_miao % 60;
time_fen = time_fen + add_fen;
time_shi = time_shi + time_fen / 60;
time_fen = time_fen%60;
time_shi = time_shi + add_shi;
time_shi = time_shi%24;
if(n == 0) return time_shi;
if(n == 1) return time_fen;
if(n == 2) return time_miao;
return -1;
}
//将字符解成数�?????
int char_number(uint8_t c){
if(c >= '0' && c <= '9')
return c-'0';
else
return -1;
}
// zfc 为当前传入字符串
// zfc_n为比较字符串
// num为如果两字符串最初相等,则取字符串后面多少位的数�?????
int number_char_come(uint8_t zfc[200], uint8_t zfc_n[200], int num){
size_t len = strlen((char *)zfc_n);//无符号整数类�?????
int cnt = 0;
for(int i = 0;i < len;i++){
if(zfc[i] != zfc_n[i]) return -1; //不相�?????
else cnt++;
}
if(cnt != len) return -1;//两字符串不等
size_t shen_len = strlen((char *)zfc) - len;//剩余字符串长�?????
size_t hig_num = 0;//用以保存实际有效位数
if(shen_len > num) hig_num = num;
else hig_num = shen_len;
//int number[200];
int number1 = 0;
int multiplier = 1; // 用于计算10的幂的变�?????
for(int i = len + hig_num - 1; i >= len;i--){
//number[i-len] = char_number(zfc[i]);
if(char_number(zfc[i])== -1) {
printf("\r\r\r number error\r\n");
return -1;
}
multiplier = multiplier*10;
number1 = number1 + char_number(zfc[i])*multiplier;
}
return number1;
}
// 函数定义:从字符串中提取两位数字
int extract_two_digits(const char *str, const char *prefix, int *value) {
char *pos = strstr(str, prefix); // 查找前缀的位�?????
if (pos == NULL) return 0; // 如果没找到前�?????,返�?????0表示失败
// 跳过前缀的长度,找到数字�?????始的位置
pos += strlen(prefix);
// �?????查接下来的两个字符是否是数字
if (pos[0] >= '0' && pos[0] <= '9' && pos[1] >= '0' && pos[1] <= '9') {
// 转换字符为数�?????
*value = (pos[0] - '0') * 10 + (pos[1] - '0');
return 1; // 成功提取,返�?????1
}
return 0; // 提取失败,返�?????0
}
//判断是否到底闹钟
int en_clock = 0;//用于控制闹钟响铃
int en_clock_cnt = 0;
int clock_end[3] = {0};//记录闹钟无人时关闭的时间
//串口设置闹钟
void uart_clock(){
int ci = 0;
int ci_n = 0;
//ci = number_char_come(uart4_data,(uint8_t *)"clock shi = ",2);
ci = extract_two_digits((char *)uart4_data, (char *)"clock shi = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
shi = ci_n;
}
//ci = number_char_come(uart4_data,(uint8_t *)"clock fen = ",2);
ci = extract_two_digits((char *)uart4_data, (char *)"clock fen = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
fen = ci_n;
}
//ci = number_char_come(uart4_data,(uint8_t *)"clock miao = ",2);
ci = extract_two_digits((char *)uart4_data, (char *)"clock miao = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
miao = ci_n;
}
//设置�?????个多少时间后的闹�?????
//ci = number_char_come(uart4_data,(uint8_t *)"clock delay shi = ",2);
ci = extract_two_digits((char *)uart4_data, "clock delay shi = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,ci_n,0,0,0);
alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,ci_n,0,0,1);
alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,ci_n,0,0,2);
alarm_clock_array_cnt++;
}
//ci = number_char_come(uart4_data,(uint8_t *)"clock delay fen = ",2);
ci = extract_two_digits((char *)uart4_data, "clock delay fen = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,ci_n,0,0);
alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,ci_n,0,1);
alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,ci_n,0,2);
alarm_clock_array_cnt++;
}
ci = extract_two_digits((char *)uart4_data, "clock delay miao = ", &ci_n);
if(ci == 1){
uart4_data[0] = '1';
alarm_clock_array[alarm_clock_array_cnt][0] = clock_compute(shi,fen,miao,0,0,ci_n,0);
alarm_clock_array[alarm_clock_array_cnt][1] = clock_compute(shi,fen,miao,0,0,ci_n,1);
alarm_clock_array[alarm_clock_array_cnt][2] = clock_compute(shi,fen,miao,0,0,ci_n,2);
alarm_clock_array_cnt++;
}
// time shi = 12;fen = 10;miao = 12;music = 1;
ci = 0;
ci = ci + extract_two_digits((char *)uart4_data, "time shi = ", &alarm_clock_array[alarm_clock_array_cnt][0]);
ci = ci + extract_two_digits((char *)uart4_data, ";fen = ", &alarm_clock_array[alarm_clock_array_cnt][1]);
ci = ci + extract_two_digits((char *)uart4_data, ";miao = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
//ci = ci + extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][2]);
if(ci == 3){
//完美对应
uart4_data[0] = '1';
ci = extract_two_digits((char *)uart4_data, ";music = ", &alarm_clock_array[alarm_clock_array_cnt][3]);
if(ci > list_max && ci<0) //如果大于音乐总数
alarm_clock_array[alarm_clock_array_cnt][3] = 3;//默认�?????3
alarm_clock_array_cnt++;
}
if(strcmp("clock delay list",(char *)uart4_data)==0){
uart4_data[0] = '0';
for(int i = 0; i< alarm_clock_array_cnt;i++){
if(alarm_clock_array[i][0] != -1 && alarm_clock_array[i][1] != -1 && alarm_clock_array[i][2] != -1)
printf("%d : time -> %d/%d/%d \r\n",i, alarm_clock_array[i][0],
alarm_clock_array[i][1],
alarm_clock_array[i][2]
);
}
}
//读取关闭第几位闹�?????
//ci = number_char_come(uart4_data,(uint8_t *)"clock stop list = ",2);
ci = extract_two_digits((char *)uart4_data, "clock stop list = ", &ci_n);
if(ci == 1){
alarm_clock_array[ci_n][0] = -1;
alarm_clock_array[ci_n][1] = -1;
alarm_clock_array[ci_n][2] = -1;
}
//关闭闹钟
if(strcmp("clock stop stop",(char *)uart4_data)==0){
en_clock = 0;
}
if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
}
void smg_xians(){
}
void alarm_clock(){
static int pos = 0;
HAL_I2C_Mem_Write(&hi2c1,0x70,0X10+pos, 1, (uint8_t*)&buf[pos],1,100);
HAL_Delay(1);
pos++;
if(pos == 3 && pos == 6) pos++;
if(pos == 8) pos = 0;
uart_clock();//调用串口控制
for(int j=0;j<alarm_clock_array_cnt && en_clock == 0;j++){
//int cnt_clock = 0;
if(alarm_clock_array[j][0] == shi && alarm_clock_array[j][1] == fen && alarm_clock_array[j][2] == miao) {
en_clock_cnt = j;
en_clock = 1;
clock_end[0] = clock_compute(shi,fen,miao,0,0,30,0);
clock_end[1] = clock_compute(shi,fen,miao,0,0,30,1);
clock_end[2] = clock_compute(shi,fen,miao,0,0,30,2);
break;
}
}
//当闹钟响�?????30S
if(shi == clock_end[0] && fen == clock_end[1] && miao == clock_end[2]){
en_clock = 0;//关闭闹钟
//EN_music = 1;
}
if(en_clock == 1 ){
motor(10);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
}
else{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_6, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
}
}
uint8_t add1=0xFE,add2=0xE5,add3=0xE3;
//0xFE复位 0xE5启动湿度转换 0xE3启动温度转换
uint16_t RH_Code,RH_Code_low=0,RH_Code_high=0;
uint16_t Temp_Code,Temp_Code_low=0,Temp_Code_high=0;
int humidity_min = 50;//能仍受的�?????低干燥程�?????
int temperature_max = 50;//能仍受的�?????高温�?????
int en_t = 0; //温度使能
int en_r = 0; //湿度使能
//计算出温湿度
void Temperature_humidity(){
//湿度
HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add2, 1,100);
//写命�??????? ox40里面写命�??????? 0xe5 启动湿度转换
HAL_I2C_Master_Receive(&hi2c1, 0x81, &RH_Code, 1, 100);
//读命�??????? �???????0x40读取出湿度的数据 存入变量RH_CODE
HAL_Delay(30);
//进行高低字节转换
RH_Code_low=(RH_Code & 0xff);
RH_Code_high=(RH_Code >> 8)& 0xff;
RH_Code=(RH_Code_low << 8)+RH_Code_high;
//温度
HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add3, 1,100);
HAL_I2C_Master_Receive(&hi2c1, 0x81, &Temp_Code, 1, 100);
//读命�??????? �???????0x40读取出温度的数据 存入变量Temp_CODE
HAL_Delay(30);
//进行高低字节转换
Temp_Code_low=(Temp_Code & 0xff);
Temp_Code_high=(Temp_Code >> 8)& 0xff;
Temp_Code=(Temp_Code_low << 8)+Temp_Code_high;
Temp_Code=17572*Temp_Code/65535-4685;//扩大�???????百�??
RH_Code=125*RH_Code/65536-6;//计算出湿度�??
//printf("Temp_Code = \r%d.%d RH_Code = %d%%\n",Temp_Code/100,Temp_Code%100,RH_Code%100);
//串口输出温湿�???????
HAL_Delay(2);
}
void uart_sensor(){
int tr=0;
int tr_i = 0;
tr = extract_two_digits((char *)uart4_data, "sensor humidity_min = ", &tr_i);
if(tr != 0){
humidity_min = tr_i;
}
tr = extract_two_digits((char *)uart4_data, "sensor temperature_max = ", &tr_i);
if(tr != 0){
temperature_max = tr_i;
}
if(strcmp("sensor temperature start",(char *)uart4_data)==0){
en_t = 1;
}
if(strcmp("sensor humidity start",(char *)uart4_data)==0){
en_r = 1;
}
if(strcmp("sensor temperature stop",(char *)uart4_data)==0){
en_t = 0;
}
if(strcmp("sensor humidity stop",(char *)uart4_data)==0){
en_r = 0;
}
if(strcmp("sensor list",(char *)uart4_data)==0){
uart4_data[0] = '0';
printf("Temp_Code = \r%d.%d RH_Code = %d%%\r\n",Temp_Code/100,Temp_Code%100,RH_Code%100);
printf("sensor en_t : %d\r\n",en_t);
printf("sensor en_r : %d\r\n",en_r);
printf("sensor temperature_max : %d\r\n",temperature_max);
printf("sensor humidity_min : %d\r\n",humidity_min);
}
if(strcmp("sensor Temp_Code RH_Code",(char *)uart4_data)==0){
uart4_data[0] = '0';
printf("Temp_Code = \r%d.%d RH_Code = %d%%\n",Temp_Code/100,Temp_Code%100,RH_Code%100);
}
}
void sensor(){
static int iii = 0;
if(iii == 0){
HAL_I2C_Master_Transmit(&hi2c1, 0x80, &add1, 1, 100);
HAL_Delay(2);
iii++;
}
Temperature_humidity();
uart_sensor();
if(RH_Code < humidity_min && en_r == 1){
//motor(10);
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_SET);
}
else{
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11, GPIO_PIN_RESET);
}
if(Temp_Code/100 >= temperature_max && en_t == 1){
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_SET);
}
else{
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_10, GPIO_PIN_RESET);
}
}
uint8_t DZP_data[6][34]={
{0xAA,0x55,
0xFD,0xFF,0xFE,0xFF,0xC0,0x07,0xFF,0xFF,0xF7,0xDF,0xFB,0xBF,0x00,0x01,0xFF,0xFF,
0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF,0xEF,0xEF,0xE0,0x0F,0xEF,0xEF},//�?//0//
{0xAA,0x55,
0xEF,0xDF,0xEF,0xDF,0xC3,0xDF,0xDF,0xDF,0xBE,0x03,0x42,0xDB,0xEE,0xDB,0xEE,0xDB,
0x02,0xDB,0xEE,0x03,0xEE,0xDB,0xEF,0xDF,0xEB,0xDF,0xE7,0xDF,0xEF,0xDF,0xFF,0xDF},//�?//1//
{0xAA,0x55,
0xF7,0xBF,0xF7,0xBF,0xF7,0xBF,0xEC,0x07,0xEF,0xBF,0xCF,0x7F,0xC8,0x01,0xAF,0x7F,
0x6E,0xFF,0xEC,0x07,0xEF,0xF7,0xEE,0xEF,0xEF,0x5F,0xEF,0xBF,0xEF,0xDF,0xEF,0xDF}//�?//2//
};
void uart_mode(){
if(strcmp("mode = music",(char *)uart4_data)==0){
mode = 0;
}
if(strcmp("mode = clock",(char *)uart4_data)==0){
mode = 1;
}
if(strcmp("mode = sensor",(char *)uart4_data)==0){
mode = 2;
}
}
void end_main(){
tone_init(); //初始化音量频�??????
list_max = music_init();//更新乐谱
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); //启动蜂鸣器定时器
HAL_TIM_Base_Start_IT(&htim2); //启动定时�??????2
HAL_TIM_Base_Start_IT(&htim3); //启动定时�??????2
//1 使能串口空闲中断
__HAL_UART_ENABLE_IT(&huart4,UART_IT_IDLE);
//2.使能串口中断接收数据
HAL_UART_Receive_IT(&huart4,rx_buf,sizeof(rx_buf));
int mode_n = 1;
while(1){
music_kz();
alarm_clock();
uart_mode();
sensor();
if(mode_n != mode){
mode_n = mode;
for(int i = 0; i<34;i++){
//printf("afgsbgafdffag");
HAL_I2C_Master_Transmit(&hi2c1, 0xA0 , (uint8_t*)&DZP_data[mode][i], 1, 300);
HAL_Delay(2);
}
}
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
if(IS_ENGINEERING_BOOT_MODE())
{
/* Configure the system clock */
SystemClock_Config();
}
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_TIM2_Init();
MX_TIM4_Init();
MX_UART4_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
end_main();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//printf("afsgbhdn\t\n");
//HAL_Delay(500);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = 16;
RCC_OscInitStruct.HSIDivValue = RCC_HSI_DIV1;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
RCC_OscInitStruct.PLL2.PLLState = RCC_PLL_NONE;
RCC_OscInitStruct.PLL3.PLLState = RCC_PLL_NONE;
RCC_OscInitStruct.PLL4.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** RCC Clock Config
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_ACLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_PCLK3|RCC_CLOCKTYPE_PCLK4
|RCC_CLOCKTYPE_PCLK5;
RCC_ClkInitStruct.AXISSInit.AXI_Clock = RCC_AXISSOURCE_HSI;
RCC_ClkInitStruct.AXISSInit.AXI_Div = RCC_AXI_DIV1;
RCC_ClkInitStruct.MCUInit.MCU_Clock = RCC_MCUSSOURCE_HSI;
RCC_ClkInitStruct.MCUInit.MCU_Div = RCC_MCU_DIV1;
RCC_ClkInitStruct.APB4_Div = RCC_APB4_DIV1;
RCC_ClkInitStruct.APB5_Div = RCC_APB5_DIV1;
RCC_ClkInitStruct.APB1_Div = RCC_APB1_DIV1;
RCC_ClkInitStruct.APB2_Div = RCC_APB2_DIV1;
RCC_ClkInitStruct.APB3_Div = RCC_APB3_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief I2C1 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x10707DBC;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/** Configure Analogue filter
*/
if (HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE) != HAL_OK)
{
Error_Handler();
}
/** Configure Digital filter
*/
if (HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 6400-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1000-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 6399;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 10000-1;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}
/**
* @brief TIM4 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM4_Init(void)
{
/* USER CODE BEGIN TIM4_Init 0 */
/* USER CODE END TIM4_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM4_Init 1 */
/* USER CODE END TIM4_Init 1 */
htim4.Instance = TIM4;
htim4.Init.Prescaler = 639;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 100-1;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim4, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM4_Init 2 */
/* USER CODE END TIM4_Init 2 */
HAL_TIM_MspPostInit(&htim4);
}
/**
* @brief UART4 Initialization Function
* @param None
* @retval None
*/
static void MX_UART4_Init(void)
{
/* USER CODE BEGIN UART4_Init 0 */
/* USER CODE END UART4_Init 0 */
/* USER CODE BEGIN UART4_Init 1 */
/* USER CODE END UART4_Init 1 */
huart4.Instance = UART4;
huart4.Init.BaudRate = 115200;
huart4.Init.WordLength = UART_WORDLENGTH_8B;
huart4.Init.StopBits = UART_STOPBITS_1;
huart4.Init.Parity = UART_PARITY_NONE;
huart4.Init.Mode = UART_MODE_TX_RX;
huart4.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart4.Init.OverSampling = UART_OVERSAMPLING_16;
huart4.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart4.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart4.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart4) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart4, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart4, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart4) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN UART4_Init 2 */
/* USER CODE END UART4_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOI_CLK_ENABLE();
__HAL_RCC_GPIOG_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1|GPIO_PIN_6, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
/*Configure GPIO pins : PF1 PF6 */
GPIO_InitStruct.Pin = GPIO_PIN_1|GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOF, &GPIO_InitStruct);
/*Configure GPIO pin : PC7 */
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pins : PI11 PI10 */
GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOI, &GPIO_InitStruct);
/*Configure GPIO pins : PG2 PG0 PG1 */
GPIO_InitStruct.Pin = GPIO_PIN_2|GPIO_PIN_0|GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOG, &GPIO_InitStruct);
/*Configure GPIO pin : PE9 */
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI0_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
HAL_NVIC_SetPriority(EXTI1_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(EXTI1_IRQn);
HAL_NVIC_SetPriority(EXTI2_IRQn, 3, 0);
HAL_NVIC_EnableIRQ(EXTI2_IRQn);
HAL_NVIC_SetPriority(EXTI9_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(EXTI9_IRQn);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
stm32mp1xx_it.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32mp1xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2024 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32mp1xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
int mode = 0; //模式
extern void uart4_idle_func(void);
extern void smg_xians();
// 音乐盒基�?????变量
int time_100ms_cnt = 0; //0.1s计数�?????
int Beat_speed = 5; //节拍速度,代表半个节拍需要多少个0.1s
int Beat_speed_n = 0; //实际执行的节拍数
int Beat_num = 2; //这个�?????个音�?????要多少个 半拍
int flag = 0; //当其等于 1 时,表示�?????个音结束
int EN_music = 0; //使能信号,用于开启整个音乐盒
int list = 0; //音乐列表
int list_max = 0; //音乐总数
int Low_volume = 5; //音量大小
int Low_volume_cnt = 3; //音量大小增加�?????
int music_speed_i = 0; //音乐播放速度模式保存
// 音乐播放速度控制函数
int music_speed_kz(int i){
//倍数计算公式 1 + (1 - (新的节拍速度 / 原来的节拍�?�度))
switch(i){
case 0:{
Beat_speed = 5; //0.5s半个节拍,正�?????+�??????�度
break;
}
case 1:{
Beat_speed = 4; //1.2倍数
break;
}
case 2:{
Beat_speed = 3; //约等�??????? 1.5倍数
break;
}
case 3:{
Beat_speed = 1; //约等�??????? 2 倍数
break;
}
case 4:{
Beat_speed = 6; //约等�??????? 0.8 倍数
break;
}
case 5:{
Beat_speed = 7; //约等�??????? 0.6 倍数
break;
}
default:{
Beat_speed = 5; //0.5s半个节拍,正常�?�度
i=0;
break;
}
}
return i;
}
//数码管闹�????
int smg_number[10] = {0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xE0,0xFE,0xF6};
int buf[8] = {0};
//闹钟保存数组
int alarm_clock_array[20][4] = {0};
int alarm_clock_array_cnt = 0;
//实时时钟信息
int shi_shi = 0;
int shi_ge = 0;
int fen_shi = 0;
int fen_ge = 0;
int miao_shi = 0;
int miao_ge = 0;
int miao = 0;
int shi = 0;
int fen = 0;
int EN_clock = 0;//闹钟设置使能
extern int en_clock;//用于控制闹钟响铃
//闹钟设置信息
int shi_shi_clock = 0;
int shi_ge_clock = 0;
int fen_shi_clock = 0;
int fen_ge_clock = 0;
int miao_shi_clock = 0;
int miao_ge_clock = 0;
int miao_clock = 0, shi_clock = 0, fen_clock = 0;
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern TIM_HandleTypeDef htim2;
extern TIM_HandleTypeDef htim3;
extern UART_HandleTypeDef huart4;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex-M4 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Pre-fetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32MP1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32mp1xx.s). */
/******************************************************************************/
/**
* @brief This function handles EXTI line0 interrupt.
*/
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_0) == 0 && mode == 0)//确保数据稳定
{
//每次按下解决 音量�??????? Low_volume_cnt
Low_volume = Low_volume + Low_volume_cnt;
if(Low_volume >= 10)
Low_volume = 0;
}
if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_0)==GPIO_PIN_RESET && mode == 1) {
shi_clock++;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
if(shi_clock>=24)
{
shi_clock=0;
}
miao_shi_clock=miao_clock/10;
miao_ge_clock=miao_clock%10;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
buf[0]=smg_number[shi_shi_clock];
buf[1]=smg_number[shi_ge_clock];
buf[3]=smg_number[fen_shi_clock];
buf[4]=smg_number[fen_ge_clock];
buf[6]=smg_number[miao_shi_clock];
buf[7]=smg_number[miao_ge_clock];
}
/* USER CODE END EXTI0_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}
/**
* @brief This function handles EXTI line1 interrupt.
*/
void EXTI1_IRQHandler(void)
{
/* USER CODE BEGIN EXTI1_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_1) == 0 && mode == 0)//确保数据稳定
{
music_speed_i++;
music_speed_i = music_speed_kz(music_speed_i);
}
if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_1)==GPIO_PIN_RESET && mode == 1) {
fen_clock++;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
if(fen_clock>=60)
{
fen_clock=0;
shi_clock++;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
if(shi_clock>=24)
{
shi_clock=0;
}
}
miao_shi_clock=miao_clock/10;
miao_ge_clock=miao_clock%10;
fen_shi_clock=fen_clock/10;
fen_ge_clock=fen_clock%10;
shi_shi_clock=shi_clock/10;
shi_ge_clock=shi_clock%10;
buf[0]=smg_number[shi_shi_clock];
buf[1]=smg_number[shi_ge_clock];
buf[3]=smg_number[fen_shi_clock];
buf[4]=smg_number[fen_ge_clock];
buf[6]=smg_number[miao_shi_clock];
buf[7]=smg_number[miao_ge_clock];
}
/* USER CODE END EXTI1_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
/* USER CODE BEGIN EXTI1_IRQn 1 */
/* USER CODE END EXTI1_IRQn 1 */
}
/**
* @brief This function handles EXTI line2 interrupt.
*/
void EXTI2_IRQHandler(void)
{
/* USER CODE BEGIN EXTI2_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOG, GPIO_PIN_2) == 0 && mode == 0)//确保数据稳定
{
list++;
if(list > list_max){
list = 0;
}
}
if(HAL_GPIO_ReadPin(GPIOG,GPIO_PIN_2)==GPIO_PIN_RESET && mode == 1) {
//在此处关闭闹�????
en_clock = 0;
}
/* USER CODE END EXTI2_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_2);
/* USER CODE BEGIN EXTI2_IRQn 1 */
/* USER CODE END EXTI2_IRQn 1 */
}
/**
* @brief This function handles TIM2 global interrupt.
*/
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
if(EN_music == 1)
time_100ms_cnt++;
else
time_100ms_cnt = time_100ms_cnt; //其余状�?�不计数
if(time_100ms_cnt >= Beat_speed_n * Beat_num){ //这个音节结束
time_100ms_cnt = 0;
flag = 1; //发�?�音节结束信�???????
}
//数码�????
static int smg_time_100ms = 0;
smg_time_100ms++;
if(smg_time_100ms>=10){
miao++;
smg_time_100ms = 0;
}
if (miao>=60)
{
miao=0;
fen++;
if(fen>=60)
{
fen=0;
shi++;
if(shi>=24)
{
shi=0;
}
}
}
if(miao >= 60){
miao = miao-60;
fen++;
}
if(fen>=60){
fen = fen-60;
shi ++;
}
if(shi>= 24){
shi = shi -24;
}
miao_shi=miao/10;
miao_ge=miao%10;
fen_shi=fen/10;
fen_ge=fen%10;
shi_shi=shi/10;
shi_ge=shi%10;
if(EN_clock == 0){
buf[0]=smg_number[shi_shi];
buf[1]=smg_number[shi_ge];
buf[3]=smg_number[fen_shi];
buf[4]=smg_number[fen_ge];
buf[6]=smg_number[miao_shi];
buf[7]=smg_number[miao_ge];
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_RESET);
//HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_RESET);
//HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_RESET);
}
else{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_1, GPIO_PIN_SET);
//HAL_GPIO_WritePin(GPIOC, GPIO_PIN_7, GPIO_PIN_SET);
//HAL_GPIO_WritePin(GPIOI, GPIO_PIN_11|GPIO_PIN_10, GPIO_PIN_SET);
}
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
smg_xians();
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
/**
* @brief This function handles UART4 global interrupt.
*/
void UART4_IRQHandler(void)
{
/* USER CODE BEGIN UART4_IRQn 0 */
uart4_idle_func();
/* USER CODE END UART4_IRQn 0 */
HAL_UART_IRQHandler(&huart4);
/* USER CODE BEGIN UART4_IRQn 1 */
/* USER CODE END UART4_IRQn 1 */
}
/**
* @brief This function handles EXTI line9 interrupt.
*/
void EXTI9_IRQHandler(void)
{
/* USER CODE BEGIN EXTI9_IRQn 0 */
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 0){//确保数据稳定
EN_music = !EN_music;
}
if(HAL_GPIO_ReadPin(GPIOE, GPIO_PIN_9) == 0 && mode == 1 ){//确保数据稳定
if(EN_clock == 1){
//闹钟设置成功
alarm_clock_array[alarm_clock_array_cnt][0] = shi_clock;
alarm_clock_array[alarm_clock_array_cnt][1] = fen_clock;
alarm_clock_array[alarm_clock_array_cnt][2] = miao_clock;
alarm_clock_array[alarm_clock_array_cnt][3] = 3; //默认播放第三首音�????
alarm_clock_array_cnt++;
if(alarm_clock_array_cnt >= 20) alarm_clock_array_cnt = 0;
EN_clock = 0;
}
else if(EN_clock == 0){
//设置闹钟
shi_shi_clock = shi_shi;
shi_ge_clock = shi_ge;
fen_shi_clock = fen_shi;
fen_ge_clock = fen_ge;
miao_shi_clock = 0;
miao_ge_clock = 0;
miao_clock = 0;
shi_clock = shi;
fen_clock = fen;
EN_clock = 1;
}
}
/* USER CODE END EXTI9_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_9);
/* USER CODE BEGIN EXTI9_IRQn 1 */
/* USER CODE END EXTI9_IRQn 1 */
}
/**
* @brief This function handles RCC wake-up interrupt.
*/
void RCC_WAKEUP_IRQHandler(void)
{
/* USER CODE BEGIN RCC_WAKEUP_IRQn 0 */
/* USER CODE END RCC_WAKEUP_IRQn 0 */
HAL_RCC_WAKEUP_IRQHandler();
/* USER CODE BEGIN RCC_WAKEUP_IRQn 1 */
/* USER CODE END RCC_WAKEUP_IRQn 1 */
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
串口指令集
mode = music
mode = clock
mode = sensor
music volume increase
music volume reduction
music speed increase
music speed reduction
music next song
music previous song
music start
music stop
clock shi =
clock fen =
clock miao =
clock delay shi =
clock delay fen =
clock delay miao =
time shi = ;fen = ;miao =
clock delay list
clock stop list =
clock stop stop
sensor humidity_min =
sensor temperature_max =
sensor temperature start
sensor humidity start
sensor temperature stop
sensor humidity stop
sensor list
sensor Temp_Code RH_Code六、部分效果展示
STM32杂交版
七、总结
本设计是一个高度集成的基于STM32MP157A单片机的多功能系统,通过整合蜂鸣器、数码管、点阵屏、温湿度传感器、LED灯、按键等多种模块,实现了丰富的交互与功能。系统利用STM32CUBEIDE作为开发平台,充分发挥了STM32MP157A单片机的高性能与灵活性,展现了其在嵌入式系统设计中的广泛应用潜力。
设计总结:
模块化设计:本设计采用了模块化设计思路,将不同功能模块(如闹钟、音乐盒、温湿度监测)独立设计后整合在一起,不仅提高了系统的可维护性和可扩展性,还使得各个模块的功能实现更加清晰明了。
灵活的模式切换:通过串口通信实现不同模式(闹钟、音乐盒、温湿度监测)之间的灵活切换,使得用户可以根据需要轻松选择所需功能,提高了系统的用户友好性和实用性。
多样化的显示与交互:点阵屏在不同模式下显示不同的汉字(如“钟”、“音”、“传”),直观展示了当前的工作模式,增强了用户体验。同时,按键和串口控制相结合的方式,使得用户可以通过多种途径对系统进行操作,如调节音乐播放速度、音量、切换歌曲,调整闹钟时间、设置多个闹钟等,极大地丰富了系统的交互方式。
温湿度监测与调节:系统集成了温湿度传感器,能够实时监测环境温湿度,并通过串口调节温湿度上下限,当温湿度超出设定范围时,通过LED灯进行边界提示,实现了对环境的智能监测与调节。
高效的开发平台:采用STM32CUBEIDE作为开发平台,利用其强大的代码编辑、编译、调试功能,以及丰富的库函数和示例项目,极大地提高了开发效率,降低了开发难度。
综合应用能力的展现:本设计不仅展示了STM32MP157A单片机在嵌入式系统设计中的强大功能,还体现了设计者在硬件选型、电路设计、软件编程、系统调试等方面的综合应用能力。
综上所述,本设计是一个集多功能性、灵活性、用户友好性于一体的嵌入式系统,充分展示了STM32MP157A单片机在复杂系统设计中的广泛应用前景和潜力。通过本设计的实施,不仅加深了对嵌入式系统设计的理解,还提升了解决实际问题的能力。