摘要 : 文章主要从软件和硬件两个部分对基于单片机的饲料搅拌机控制系统进行研究设计 。 硬件部分主要由传感器模块 、 信号采集模块、 键盘接入模块 、 LED 显示模块 、 继电器模块以及看门狗模块组成 。 软件部分在 KeilC51 软件基础上重点对控制系统主程序 、 中断程序以及程序编程扫描进行研究。 通过软硬件结合设计的饲料搅拌机控制系统能够实现对两条生产线的输送 、 排料 、 满料 、 空料等参数值的检测及显示,并实现自动加料搅拌的控制功能。
关键词 : 单片机;饲料搅拌机;控制系统
0 引言
饲料搅拌机是农业生产生活中应用十分广泛的设备,随着科技的不断发展,各类生产生活对信息的需求量也越来越大,对信息掌握的及时性以及精确性更成为衡量各生产厂家信息化水平的标准。 而在农业生产中效率以及精度都成为广大生产商所追求的目标。 高效率的饲料搅拌机在市场中所占的比例自然也是大得多,也更容易赢得人们的青睐。 饲料搅拌机的使用大大的提高了生产线的生产效
率,同时也大大的减轻了人力的使用,可以说从某种程度上进一步解放了人们的双手,是又一次科技的飞跃。
1 系统总体设计
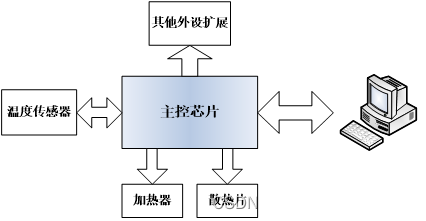
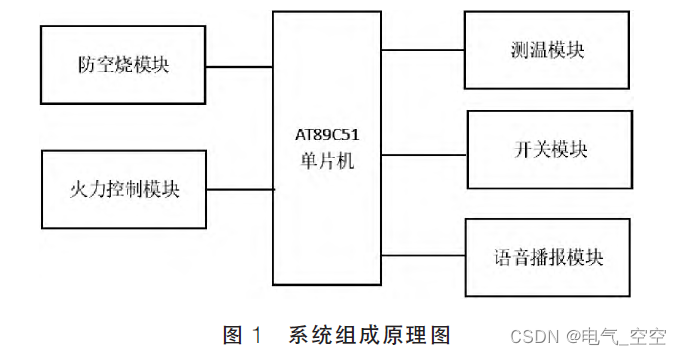
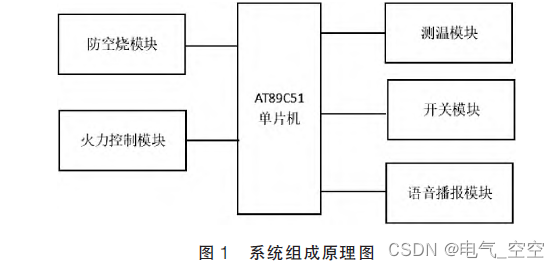
饲料搅拌机控制系统的设计以单片机为核心,整个控制系统分为六大模块:拉压力传感器模块,信号采集模块,键盘接入模块,LED 显示模块,继电器模块,看门狗模块 。控制系统结构图如图 1 所示 。

2 系统硬件设计
2.1 单片机 AT89C51
单片机是一种集成电路芯片,本设计采用 AT89C51型单片机即可。 其内部自带 4K 字节的 FLASH 存储器,同时附带 2K 字节闪存可编程可擦除只读存储器,其擦除次数可达到 1000 余次 。 AT89C51 引脚图如图 2 所示 。

2.2 传感器
传感器是一种应用十分广泛的元器件,几乎所有的生产设备都会用到它,当然本设计也不例外。 本设计为饲料搅拌机控制系统设计,依照实际生产中出现的情况,需要对搅拌机的进料、 出料 、 何时满料以及何时空料进行及时检测,以免延误工期,出现意外,而传感器便可轻松的实现该功能。 在本次设计中我们会将实际搅拌过程中出现的各种问题进行模拟并解决,比如:在搅拌过程中,饲料和水的混合比例是否正常,如果加的水过量,那就会出现过搅的情况,即饲料的纯度不够,同理如果水量不足,则会出现搅拌困难,影响搅拌速率,也会浪费大量饲料等等。 这些情况,都需要通过传感器进行检测,并及时反馈信息,及时做出调整。 鉴于本设计的实际工作环境,我们采用应变式压力传感器来检测料位和界位等参数值。
2.3 LED 显示电路
饲料搅拌机在运行时需要显示满料 、 进料以及出料时间,采用 LED 显示器即可满足要求 。 其中驱动器选择74LS377 型号,译码器选择 MC14511B 型号 。 74LS377 是一种八 D 触发器,它的输出有两种状态即 0 或 1 ,其输入端受低电平有效以及 CP 上升沿控制,可以实现数据保持及寄存功能。 而 MC14511B 作为七段驱动译码器,在实际生产中经常会用到,比如仪器显示或者用它来驱动程序等等。 显示电路如图 3 所示 。

2.4 键盘接入电路
本控制系统通过按键来执行不同的功能操作,而键盘接入芯片采用性能优良且接口灵活的 8255A 型号,其接口的可编程性使其可以直接与单片机相连接,也因此而 广泛应用,深受电子设计行业的喜爱 。就本设计而言,需用到 8255A 的 3 个 I/O 端口,同时其内部的字寄存器也是本次设计离不开的,通过地址总线对 4 个端口进行寻址操作,并将 4 个端口组合便可实现相应的功能 。 此外单片机还需要另外一个外部扩展输入口,而 74LS373 锁存器便可实现该功能,具体过程如下:当电路搭建好之后,输出信号会首先及时的发送到锁存器一端,并通过锁存器对识别的内容进行保存,然后会将信号传送到单片机,这时单片机的中断请求端会接收到是否中断的请求,选择中断则单片机完成中断操作。 键盘接入电路如图 4 所示 。

2.5 继电器电路
本设计采用 12V 直流控制 24V 的交流继电器 。 其中,无源驱动器选择 MC1413 型号,继电器的续流二极管选择IN4007 型号,反相器选择 74LS04 型号 。 继电器工作电路如图 5 所示 。

2.6 看门狗电路
看门狗电路的设计采用 MAX813L 芯片,它可以实现以 下 功 能 : ① 上 电 、 掉电状态下的复位功能; ②WATCHDOG 输出功能; ③ 掉电报警警门限检测器; ④ 手动复位输入。 看门狗电路如图 6 所示 。

3 软件设计
软件设计是实现整个控制系统功能不可或缺的一部分,而根据软件所能实现的不同功能,又可以将其分为主程序以及子程序,其中,主程序是整个控制过程的核心,其 功能就像人类的大脑一样,属于高级控制区,通过主程序完成系统各模块间的关联通讯,起到整体控制的效果;而子程序则就就像人体器官一样,用来执行实际操作,完成任务要求。 本控制系统程序主要包括主程序 、 中断程序以及程序编程扫描。 主程序流程图如图 7 所示 。

本设计饲料搅拌机控制系统中需要两个定时器来执行中断操作,具体过程如下:程序开始运行之后,0号定时器会以 1.2s 的间隔时间控制 P1.7 端口输出脉冲信号,同时 1 号定时器开始定时,时间为 1s ,用来控制数码管显示。 中断程序流程图如图 8 所示 。

本设计的程序编程扫描部分主要完成以下工作:即当 程序开始运行并到达一定时间之后, PC 指针会进行跳转,返回初始起动位置,而 RAM 存储区数据初始化以及8255A 芯片的初始化是在主程序中同时完成的,此外还需要依照实际操作中的输入信号完成相应程序的跳转执行。程序编程扫描流程图如图 9 所示 。

4 结论
本设计是基于单片机的饲料搅拌机控制系统,整个控制系统以单片机 AT89C51 为核心,由软件和硬件两部分组成。 饲料搅拌机控制系统的设计实现了对两条生产线的输送、 排料 、 满料 、 空料等参数值的显示,并且随着程序不断推进,各参数值的实时显示也会发生变化,同时还可以实现自动加料搅拌控制功能。 此外,本设计操作界面简单,操作易学易用,具有良好的抗干扰性能,能够适应不同的生产环境从而完成相应的生产任务,整套控制系统性价比高,在市场推广中备受青睐。