功能
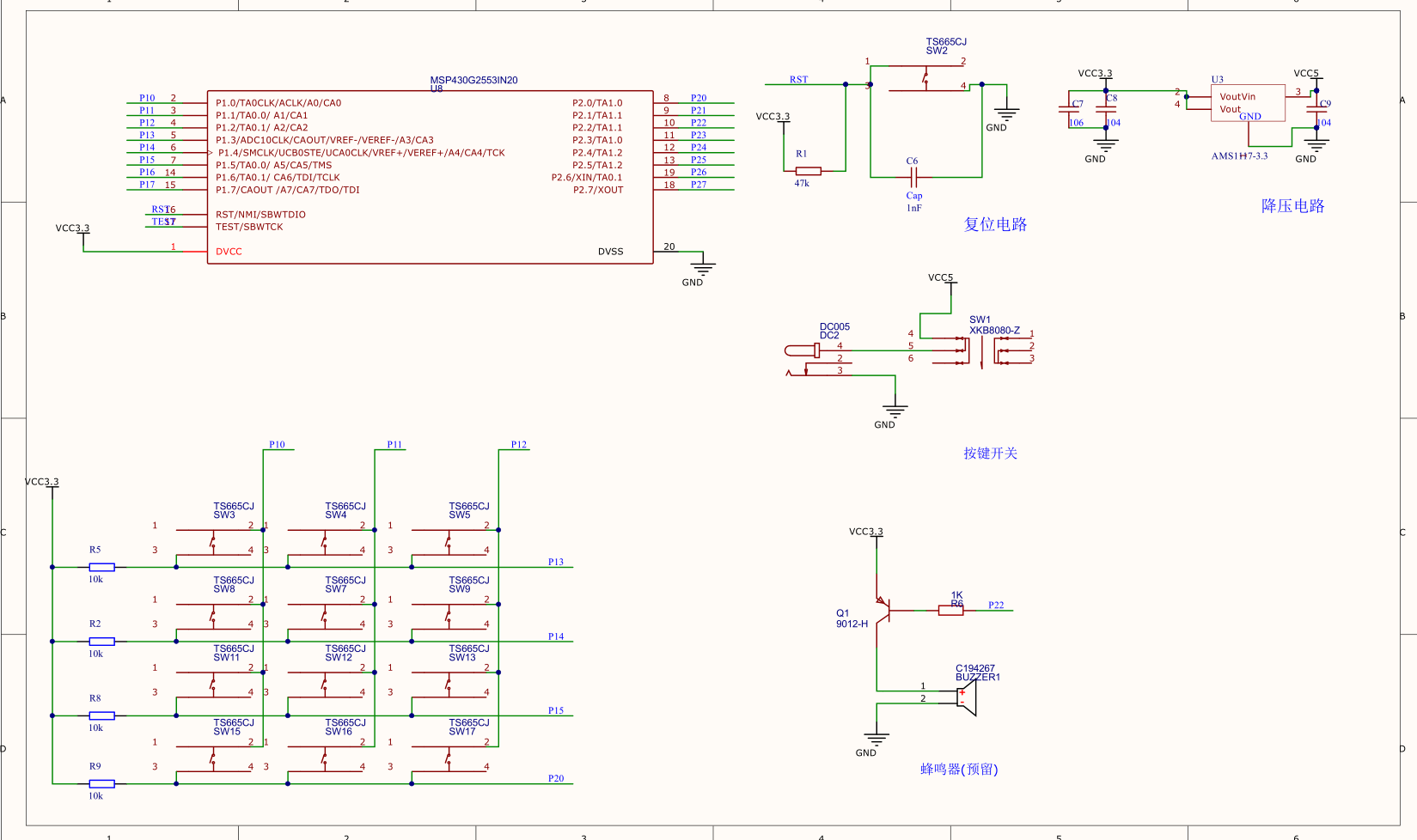
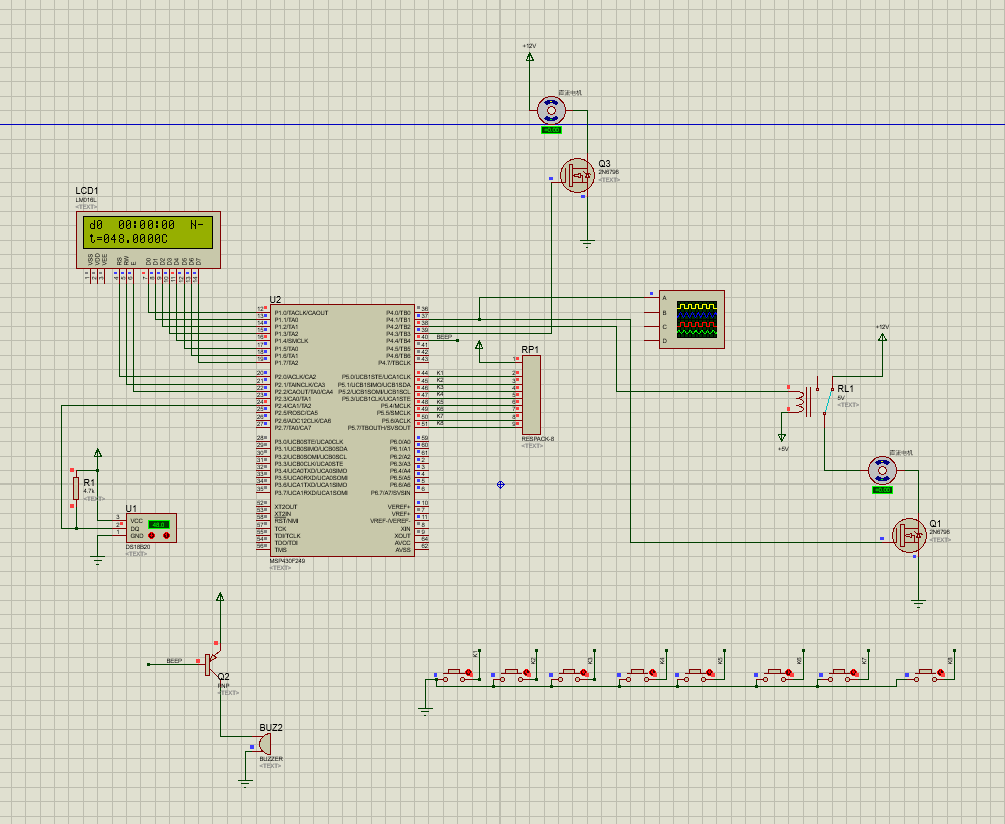
电风扇模拟控制系统设计
基本要求:
用LED/LCD 显示电风扇的工作状态 (1,2,3,4 四档风力),
显示风类:“自然风”、“常风”和“睡眠风”。
设计 “自然风”“常风”和“睡眠风” 三个风类键用于设置风类
设计一个“摇头”键用于控制电机摇头。
设计一个“定时”键,用于定时时间长短设置:
发挥部分:
设计过热检测与保护电路
若电风扇电机过热(用内存参数模拟温度,用键),则电机停止转动,
蜂鸣器报警电机冷却后(用键模拟) 电机又恢复转动。
显示格式:
LED 数码管/LCD 屏显示方法自定
效果
部分代码
void main(void)
{
char t_j = 0;
WDTCTL = WDTPW + WDTHOLD; /* 关闭看门狗 */
P1DIR = 0xFF; /* 设置方向 */
P1SEL = 0; /* 设置为普通I/O 口 */
P2DIR = 0xFF; /* 设置方向 */
P2SEL = 0; /* 设置为普通I/O 口 */
P2OUT = 0x00;
P1OUT = 0x00;
delay_ms(200);
LCD_init();
//P4.1 设置为PWM 输出
P4DIR |= BIT1;
P4SEL |= BIT1;
TBCCR0 = 1000; //PWM 周期
TBCCR1 = 0; //PWM 占空比
TBCCTL1 = OUTMOD_7; //PWM 输出模式
TBCTL = TBSSEL_2 + MC_1 + ID_3; //SMCLK, UP 模式
CCTL0 = CCIE; // CCR0 interrupt enabled
CCR0 = 32768 - 1;
TACTL = TASSEL_1 + MC_1; // ACLK, upmode
P5DIR = 0X00; //其余的都是按键
P5REN |= 0XFF;
P5OUT = 0XFF;
//P4.4输出给beep
P4DIR |= BIT4;
P4OUT &= ~BIT4;
//P4.3输出给摇头电机
P4DIR |= BIT3;
P4OUT &= BIT3;
//P4.2 继电器
P4DIR |= 0X04;
P4OUT |= 0X04; //高电平是关闭继电器
//P4.5输出
P4DIR |= BIT5;
P4OUT &= ~BIT5;
__bis_SR_register( GIE);
while (1)
{
delay_us(10);
t_j++;
if (t_j > 100)
{
if (Countdown_Flag)
{
tmp_r = (hour * 3600) + (minute * 60) + second;
if (tmp_r>0)
{
TBCCR1 = fengli[fengli_Flag_dangwei]; //每一秒钟检测一次风扇的转速
}
else
{
fengli_Flag_dangwei = 0;
TBCCR1 = fengli[fengli_Flag_dangwei]; //每一秒钟检测一次风扇的转速
}
}
else
{
TBCCR1 = fengli[fengli_Flag_dangwei]; //每一秒钟检测一次风扇的转速
}
Read_DS18B20(&TAM_KISIM, &ONDALIK_KISIM);
if ((negative == 0) && (limited == 0))
{
cnt = 0;
disp[cnt++] = 't';
disp[cnt++] = '=';
disp[cnt++] = '0' + (TAM_KISIM % 1000 / 100);
disp[cnt++] = '0' + (TAM_KISIM % 100 / 10);
disp[cnt++] = '0' + (TAM_KISIM % 10);
disp[cnt++] = '.';
disp[cnt++] = '0' + (ONDALIK_KISIM % 10000 / 1000);
disp[cnt++] = '0' + (ONDALIK_KISIM % 1000 / 100);
disp[cnt++] = '0' + (ONDALIK_KISIM % 100 / 10);
disp[cnt++] = '0' + (ONDALIK_KISIM % 10);
disp[cnt++] = 'C';
disp[cnt++] = 0;
LCD_dsp_string(0, 2, disp); /* 在第一行第一列显示"LCD TEST" */
}
if (TAM_KISIM > 50)
{
//P4.4输出给beep
P4OUT &= ~BIT4; //鸣叫
P4OUT &= 0XFB; //低电平是打开继电器,是关闭风扇
}
else
{
P4OUT |= BIT4; //不鸣叫
P4OUT |= 0X04; //高电平是关闭继电器,是正常风扇工作
}
update_disp();
}
//按键检测
if ((P5IN & BIT0) == 0) //0档位风力
{
// delay_ms(10);
if ((P5IN & BIT0) == 0)
{
fengli_Flag_dangwei = 0;
update_disp();
while ((P5IN & BIT0) == 0)
;
}
}
if ((P5IN & BIT1) == 0) //1档位风力
{
// delay_ms(10);
if ((P5IN & BIT1) == 0)
{
fengli_Flag_dangwei = 1;
update_disp();
while ((P5IN & BIT1) == 0)
;
}
}
if ((P5IN & BIT2) == 0) //2档位风力
{
// delay_ms(10);
if ((P5IN & BIT2) == 0)
{
fengli_Flag_dangwei = 2;
update_disp();
while ((P5IN & BIT2) == 0)
;
}
}
if ((P5IN & BIT3) == 0) //3档位风力
{
// delay_ms(10);
if ((P5IN & BIT3) == 0)
{
fengli_Flag_dangwei = 3;
update_disp();
while ((P5IN & BIT3) == 0)
;
}
}
if ((P5IN & BIT4) == 0) //摇头电机
{
// delay_ms(10);
if ((P5IN & BIT4) == 0)
{
if (shake_Flag == 1)
shake_Flag = 0;
else
shake_Flag = 1;
if (shake_Flag == 1)
P4OUT |= BIT3;
else
P4OUT &= ~BIT3;
update_disp();
while ((P5IN & BIT4) == 0)
;
}
}
if ((P5IN & BIT5) == 0) //加倒计时,一次加10分钟,小时不能多于12小时
{
// delay_ms(10);
if ((P5IN & BIT5) == 0)
{
tmp_r = hour * 60 + minute;
tmp_r += 10;
hour = tmp_r / 60;
minute = tmp_r % 60;
update_disp();
while ((P5IN & BIT5) == 0)
;
}
}
if ((P5IN & BIT6) == 0) //减倒计时,一次减10分钟,分钟不能小于0
{
// delay_ms(10);
if ((P5IN & BIT6) == 0)
{
tmp_r = hour * 60 + minute;
if (tmp_r >= 10)
{
tmp_r -= 10;
hour = tmp_r / 60;
minute = tmp_r % 60;
}
else
{
fengli_Flag_dangwei = 0;
hour = 0;
minute = 0;
second=0;
}
update_disp();
while ((P5IN & BIT6) == 0)
;
}
}
if ((P5IN & BIT7) == 0) //定时模式的开关
{
// delay_ms(10);
if ((P5IN & BIT7) == 0)
{
if (Countdown_Flag)
{
Countdown_Flag = 0;
hour=0;
minute=0;
second=0;
fengli_Flag_dangwei=0;
}
else
{
Countdown_Flag = 1;
}
update_disp();
while ((P5IN & BIT7) == 0)
;
}
}
}
}
全部代码
https://docs.qq.com/sheet/DUEdqZ2lmbmR6UVdU?tab=BB08J2