LeetCode 235. 二叉搜索树的最近公共祖先
1、题目
题目链接:235. 二叉搜索树的最近公共祖先
给定一个二叉搜索树, 找到该树中两个指定节点的最近公共祖先。
百度百科中最近公共祖先的定义为:“对于有根树 T 的两个结点 p、q,最近公共祖先表示为一个结点 x,满足 x 是 p、q 的祖先且 x 的深度尽可能大(一个节点也可以是它自己的祖先)。”
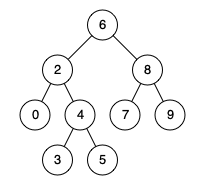
例如,给定如下二叉搜索树: root = [6,2,8,0,4,7,9,null,null,3,5]
示例 1:
输入: root = [6,2,8,0,4,7,9,null,null,3,5], p = 2, q = 8
输出: 6
解释: 节点 2 和节点 8 的最近公共祖先是 6。
示例 2:
输入: root = [6,2,8,0,4,7,9,null,null,3,5], p = 2, q = 4
输出: 2
解释: 节点 2 和节点 4 的最近公共祖先是 2, 因为根据定义最近公共祖先节点可以为节点本身。
说明:
- 所有节点的值都是唯一的。
- p、q 为不同节点且均存在于给定的二叉搜索树中。
2、递归
思路
代码
class Solution {
private:
TreeNode* traversal(TreeNode* cur, TreeNode* p, TreeNode* q) {
if (cur == nullptr) {
return cur;
}
// 如果当前节点的值大于p和q的值,则在左子树中继续搜索
if (cur->val > p->val && cur->val > q->val) {
TreeNode* left = traversal(cur->left, p, q);
// 如果在左子树中找到了符合条件的节点,则返回该节点
if (left != nullptr) {
return left;
}
}
// 如果当前节点的值小于p和q的值,则在右子树中继续搜索
if (cur->val < p->val && cur->val < q->val) {
TreeNode* right = traversal(cur->right, p, q);
// 如果在右子树中找到了符合条件的节点,则返回该节点
if (right != nullptr) {
return right;
}
}
// 如果当前节点满足条件(即值介于p和q之间),则返回当前节点
return cur;
}
public:
TreeNode* lowestCommonAncestor(TreeNode* root, TreeNode* p, TreeNode* q) {
return traversal(root, p, q);
}
};
复杂度分析
- 时间复杂度: O(n)
- 空间复杂度: O(n)
3、递归(精简版)
思路
代码
class Solution {
public:
TreeNode* lowestCommonAncestor(TreeNode* root, TreeNode* p, TreeNode* q) {
// 如果根节点的值大于p和q的值,说明p和q都在根节点的左子树中
if (root->val > p->val && root->val > q->val) {
// 递归调用左子树
return lowestCommonAncestor(root->left, p, q);
// 如果根节点的值小于p和q的值,说明p和q都在根节点的右子树中
} else if (root->val < p->val && root->val < q->val) {
// 递归调用右子树
return lowestCommonAncestor(root->right, p, q);
// 否则,根节点就是p和q的最低公共祖先
} else return root;
}
};
复杂度分析
- 时间复杂度: O(n)
- 空间复杂度: O(n)
4、迭代
思路
代码
class Solution {
public:
TreeNode* lowestCommonAncestor(TreeNode* root, TreeNode* p, TreeNode* q) {
while(root) {
// 如果当前节点的值大于p和q的值,说明p和q都在当前节点的左子树中
if (root->val > p->val && root->val > q->val) {
root = root->left;
// 如果当前节点的值小于p和q的值,说明p和q都在当前节点的右子树中
} else if (root->val < p->val && root->val < q->val) {
root = root->right;
// 如果当前节点的值等于p或q的值,或者p和q分别在当前节点的左右子树中,那么当前节点就是最低公共祖先
} else {
return root;
}
}
// 如果没有找到最低公共祖先,则返回nullptr
return nullptr;
}
};
复杂度分析
- 时间复杂度: O(n)
- 空间复杂度: O(1)