1、什么是PWM
PWM,全称为Pulse Width Modulation,中文名为脉冲宽度调制。这是一种模拟控制技术,通过改变脉冲信号的宽度来表征一个连续变量的平均值,通常用于对模拟信号的数字化控制,特别是在功率转换和信号处理中非常常见。以下是PWM的一些关键特性:
基本原理:
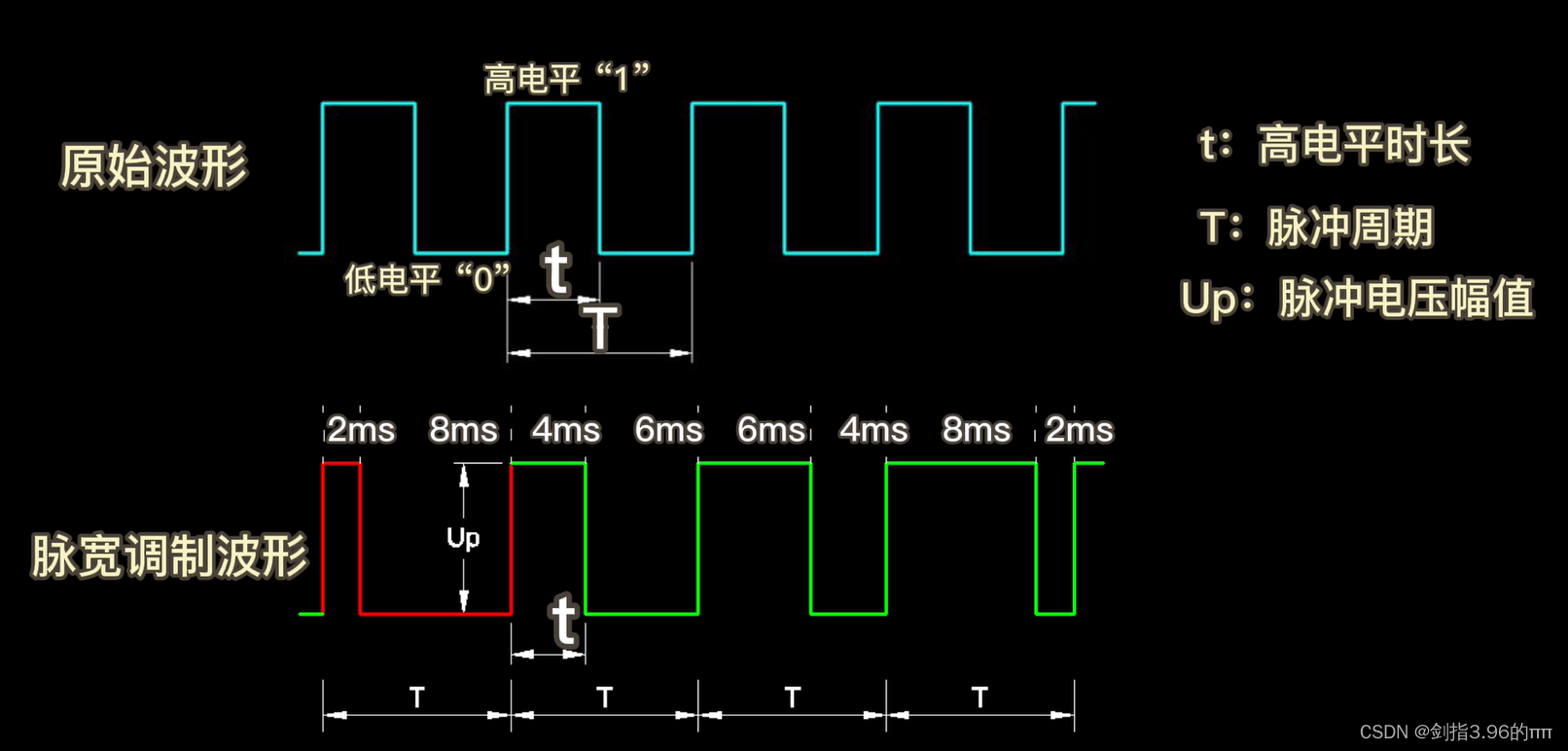
- PWM信号是由一系列宽度可变的脉冲组成,每个脉冲的周期是固定的,但高电平(导通)时间(脉冲宽度)是可以变化的。
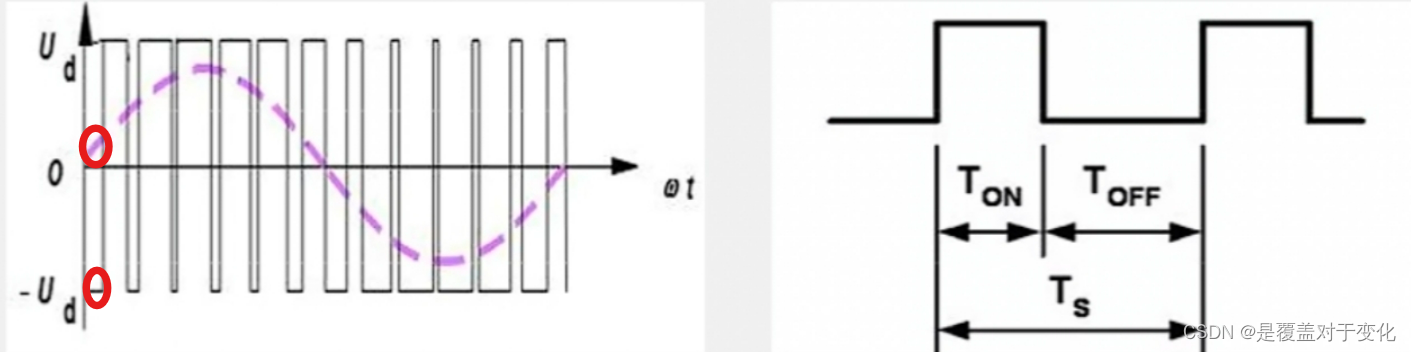
- 占空比(Duty Cycle)是脉冲宽度与周期的比例,通常以百分比表示。高占空比意味着更多的时间处于高电平状态,低占空比则相反。
应用:
- 电源管理:在电源转换器中,PWM用于控制输出电压的平均值,例如在开关电源中,通过改变开关元件的导通时间来调整输出电压。
- 电机控制:在电机驱动系统中,通过改变PWM信号的占空比来调整电机的速度和扭矩。
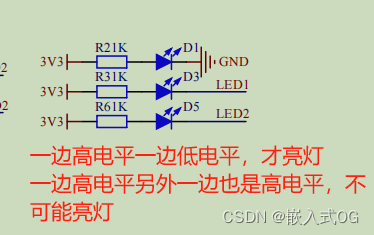
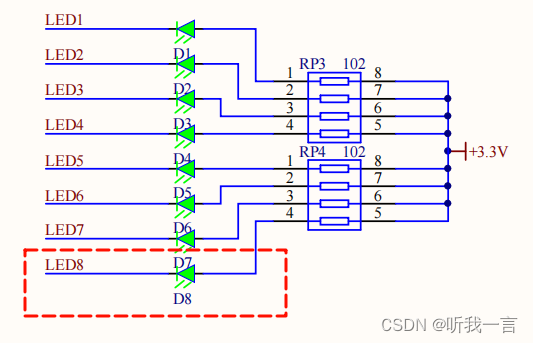
- LED亮度控制:在照明应用中,改变PWM信号的占空比可以调整LED的亮度,而不改变其工作电流的峰值。
- 音频信号处理:在数字音频系统中,PWM可用于编码和解码音频信号。
- 通信系统:在一些通信协议中,PWM可以作为数据传输的方式。
优点:
- 效率高:PWM技术允许高效地转换和控制电源,因为它通常在开关模式下操作,减少了能量损失。
- 控制精度:通过精确调整占空比,可以实现精细的控制。
- 简化电路:使用PWM可以简化模拟电路设计,因为许多功能可以通过数字逻辑来实现。
生成PWM:
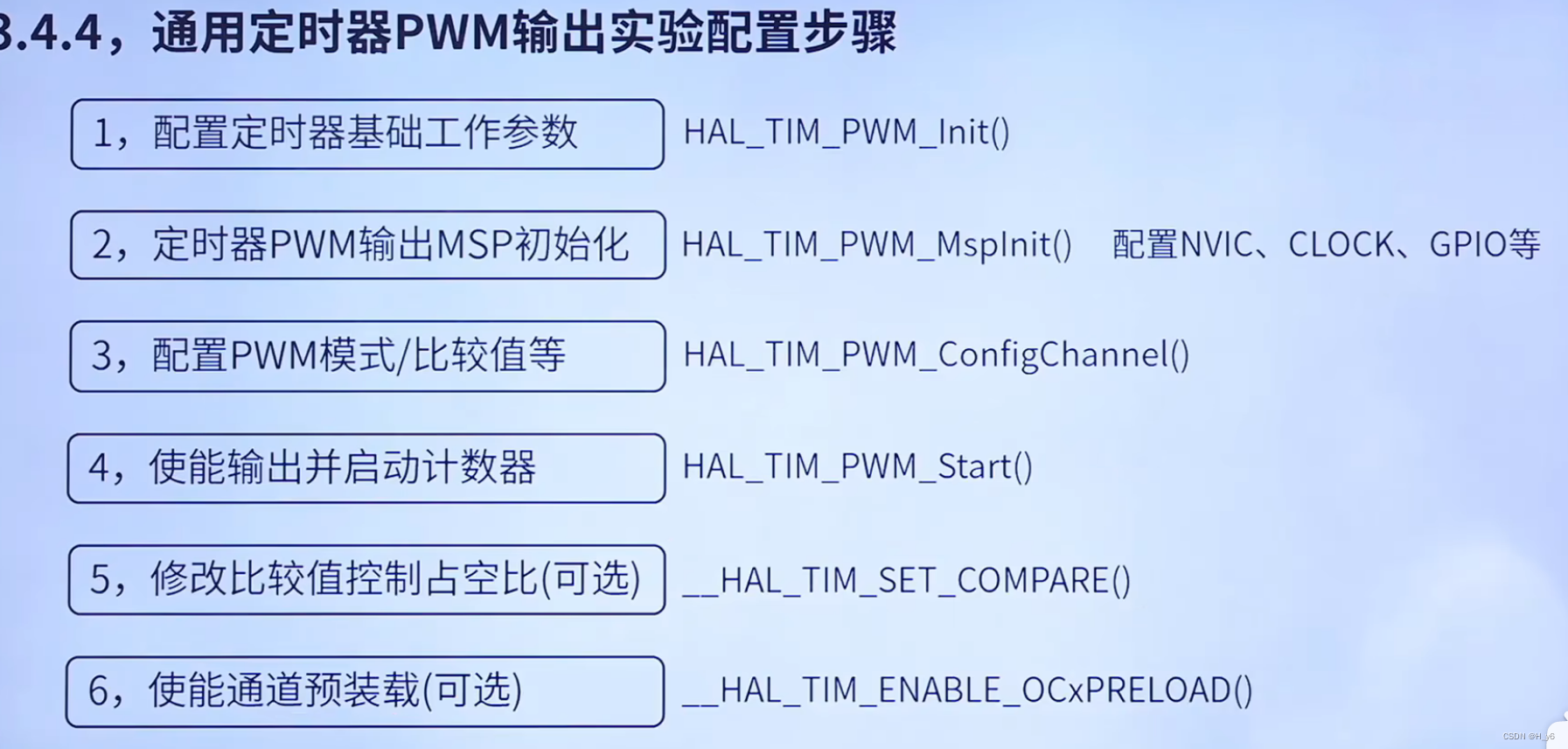
- PWM信号通常由微控制器(如STM32系列)或其他数字逻辑设备生成,这些设备通常内置了PWM发生器模块,可以通过编程设置周期、占空比和其他参数。
实现:
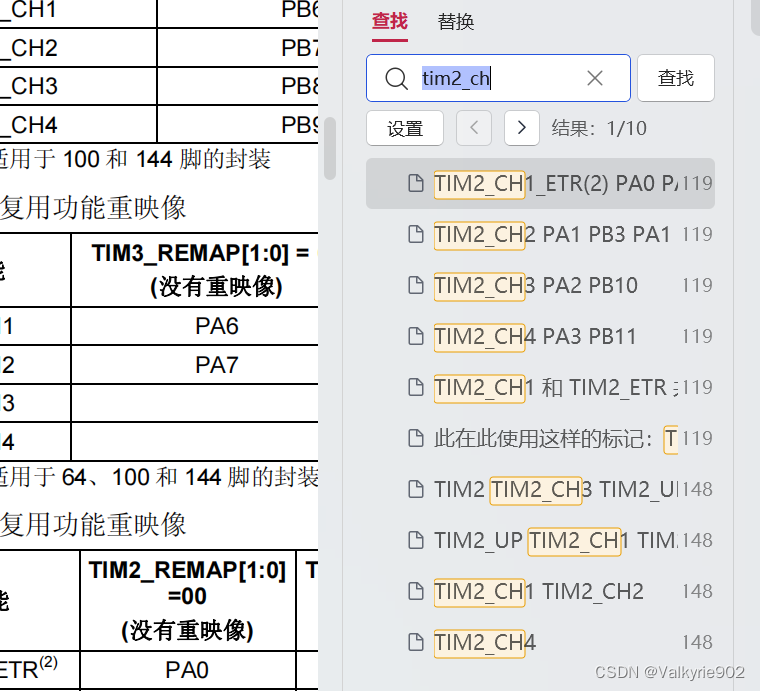
- 在STM32等微控制器中,初始化一个定时器(如TIM2),设置预分频器、计数器周期和比较值,就可以生成PWM信号。通过比较单元,当计数值与比较值匹配时,输出状态会发生变化,从而形成不同宽度的脉冲。
综上所述,PWM是一种广泛应用的数字调制技术,通过简单的数字信号实现对模拟信号的控制,广泛应用于各种电子设备和系统中。
2、使用PWM实现呼吸灯
#include "stm32f1xx_hal.h"
#include "stm32f1xx_hal_tim.h"
#include "stm32f1xx_hal_gpio.h"
TIM_HandleTypeDef htim3;
volatile uint32_t timerCounter = 0;
int main(void) {
// 初始化HAL库
HAL_Init();
// 系统时钟配置
SystemClock_Config();
// GPIO初始化,配置LED为推挽输出
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = LED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LED_GPIO_Port, &GPIO_InitStruct);
// 初始化TIM3为PWM
__HAL_RCC_TIM3_CLK_ENABLE();
htim3.Instance = TIM3;
htim3.Init.Prescaler = 84 - 1; // 假设系统时钟72MHz,预分频因子为72-1
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 10000 - 1; // 10ms周期,可以根据需要调整
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_PWM_Init(&htim3);
TIM_PWMOutputStateTypeDef pwmState = TIM_OUTPUTSTATE_ENABLE;
HAL_TIM_PWM_ConfigChannel(&htim3, &htim3.ChannelConfig[0], pwmState);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
// 呼吸灯循环
while (1) {
for (timerCounter = 0; timerCounter <= 10000; timerCounter++) {
// 设置PWM占空比,从0到100%
HAL_TIM_PWM_SetPulse(&htim3, TIM_CHANNEL_1, timerCounter);
HAL_Delay(1); // 延时1ms,使得变化更平滑
}
for (timerCounter = 10000; timerCounter > 0; timerCounter--) {
HAL_TIM_PWM_SetPulse(&htim3, TIM_CHANNEL_1, timerCounter);
HAL_Delay(1);
}
}
}当然,在实际使用时,还是需要进行驱动文件的封装和调用。