本文通过对车载毫米波雷达信号流程和链路的仿真,建立基本的算法框架,可用于算法性能的验证。并提供基础MATLAB仿真代码,作为分享和参考。
一、信号的产生
车载毫米波雷达广泛使用线性调频连续波雷达,也即发射信号频率随时间线性变化
![]() (1)
(1)
其中,fc为载波频率,k是调频斜率。
发射信号可以表示为
 (2)
(2)
其中,A为信号幅度。
接收信号经过延迟后得到
 (3)
(3)
其中,α为信号衰减系数,τ为信号延迟。
将(3)式展开,可得
 (4)
(4)
再和发射机本振进行混频滤波后得到拍频信号
 (5)
(5)
这里,Ar为混频滤波后的信号幅度,最后得到的拍频信号进行后续的处理,(5)中的t即为快时间维度。
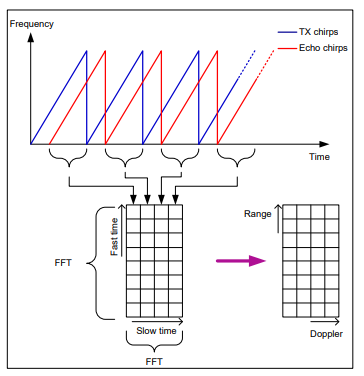
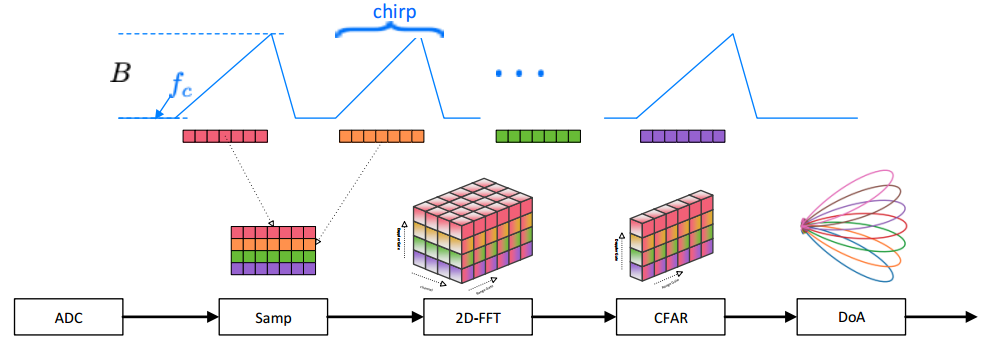
发射N个chirp,则能得到N个rb(t),再将它们组合,即形成了原始数据。然后再对原始数据做快速傅里叶变换,取峰值即可得到目标的距离和速度。原理推导可参考《Modern Radar for Automotive Applications》中第2.4节,整体处理如下图所示。
二、接收信号的处理
由于每个chirp之间有一点时间差,定义为Tp,则不同chirp对目标的探测距离需要一定补偿,也即
![]() (6)
(6)
其中,R0是目标的实际距离,R是第n个chirp检测到的距离,v是目标速度,t是第n个chirp的时延,且t = (n-1)*Tp。
若存在m个目标,则可以将目标的参数写成矩阵形式叠加到回波中。
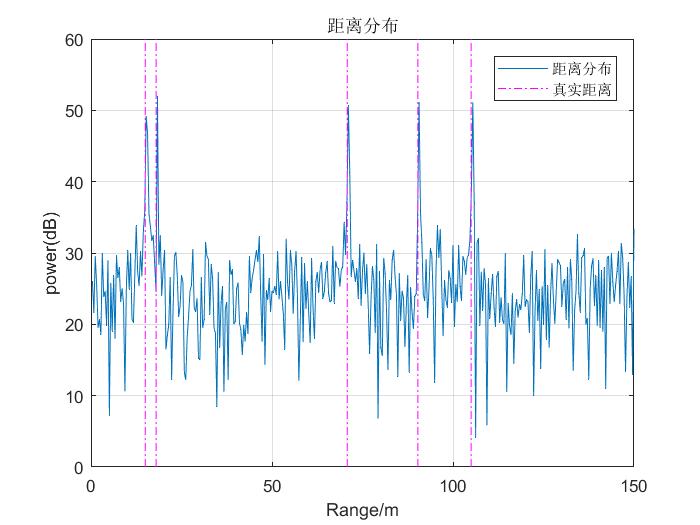
1.距离分布和距离维FFT
对目标进行一维FFT,选择第一列数据绘制距离分布图,峰值即代表了真实目标。
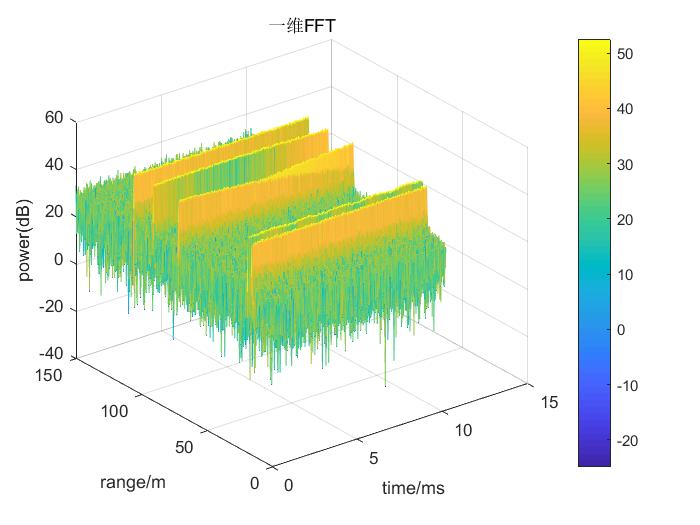
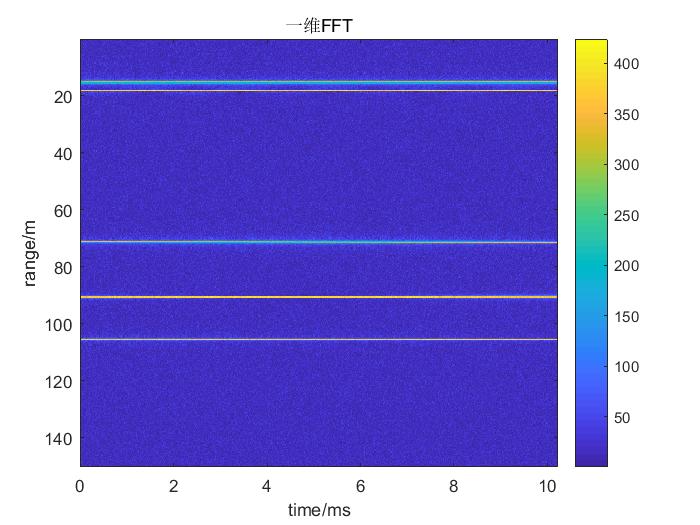
每一列的数据做FFT可以得到类似的结果,如下图所示三维图和俯视图。
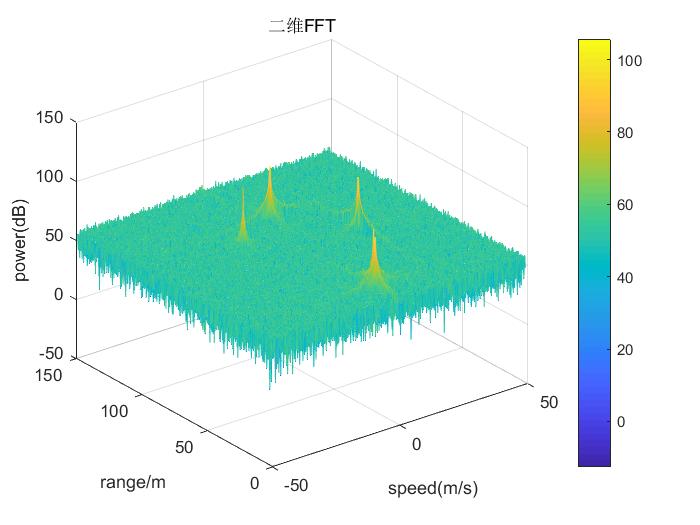
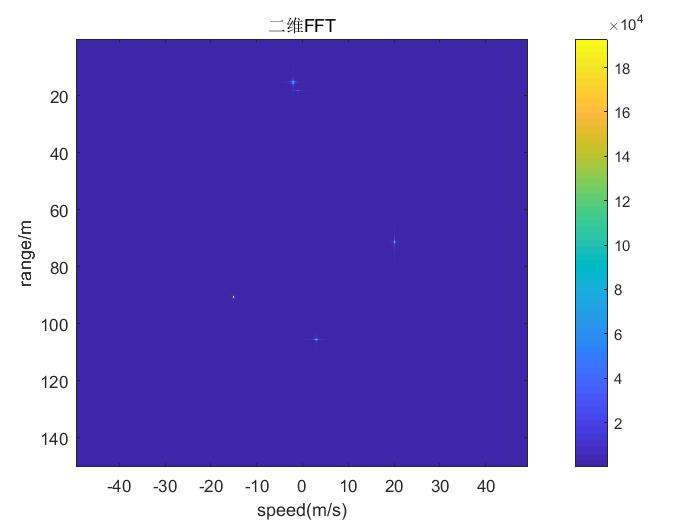
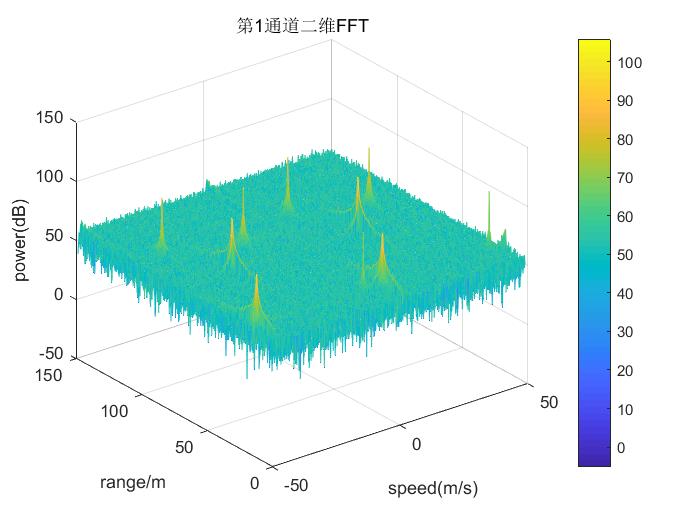
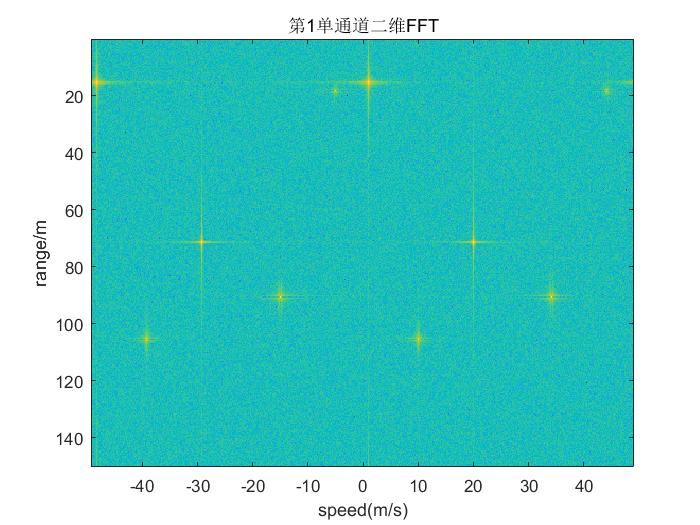
2.二维FFT和RD图
然后在一维FFT的基础上做二维FFT,得到下面的三维图和俯视图。
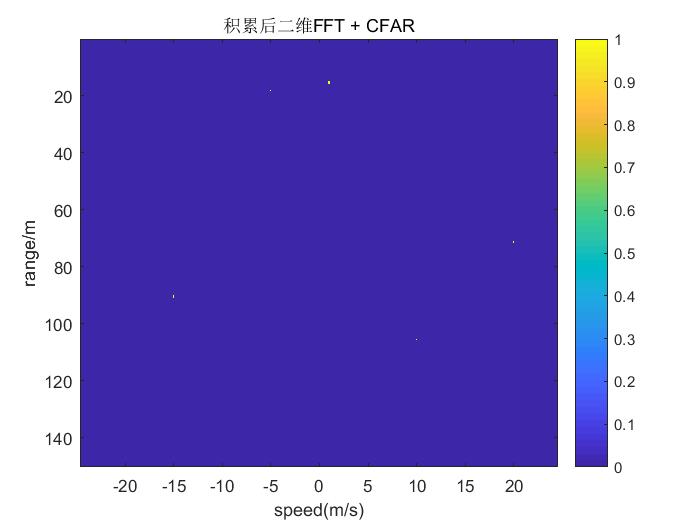
3.恒虚警检测
再沿着距离和速度维分别使用CA-CFAR,超过门限的置为1,未超过门限的置为0,则可以得到二维FFT的检测结果,下图分别为三维图和俯视图。


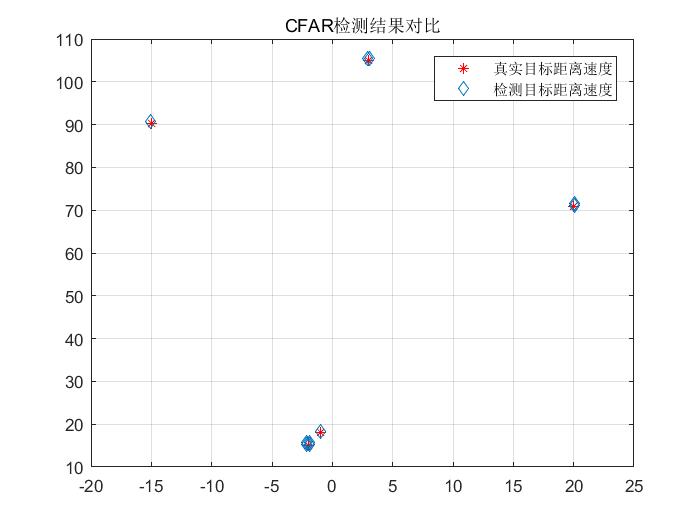
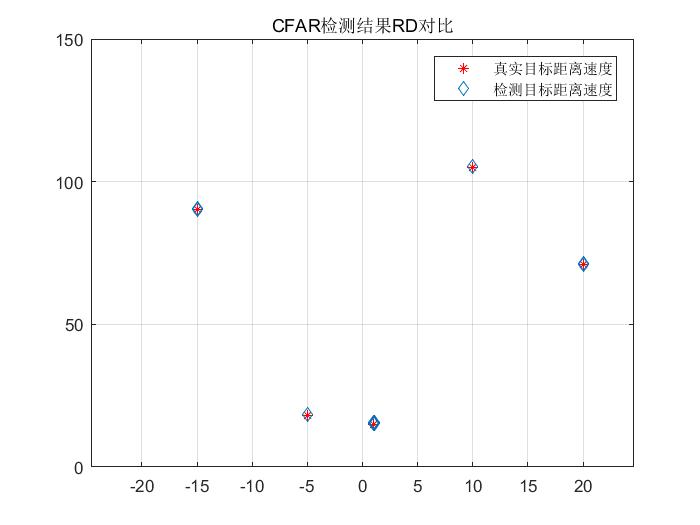
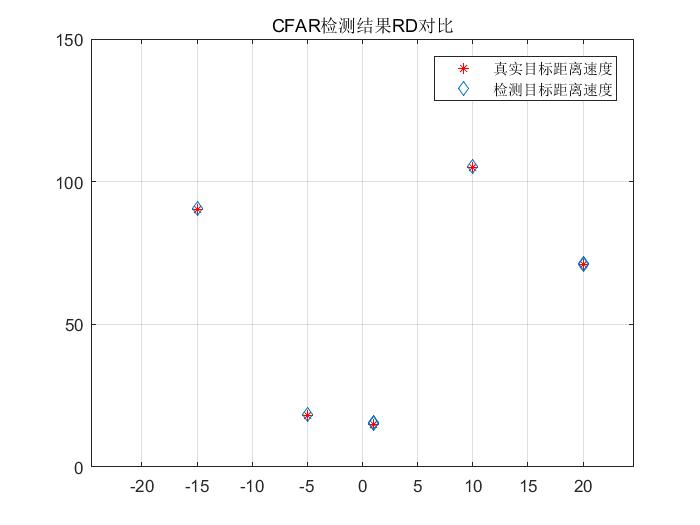
4.检测结果对比
可以清晰的看到CFAR检测后的结果,最后将结果与真实值进行对比,如下图所示。
三、TDM-MIMO工作体制
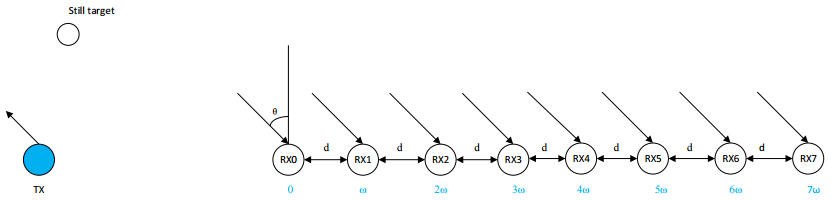
MIMO是提高孔径的常用方法,而MIMO体制要求通道之间是正交的,分时复用是最典型的波形正交方法,以当前角雷达2发4收为例,可通过TDM-MIMO工作体制,虚拟出8个通道。

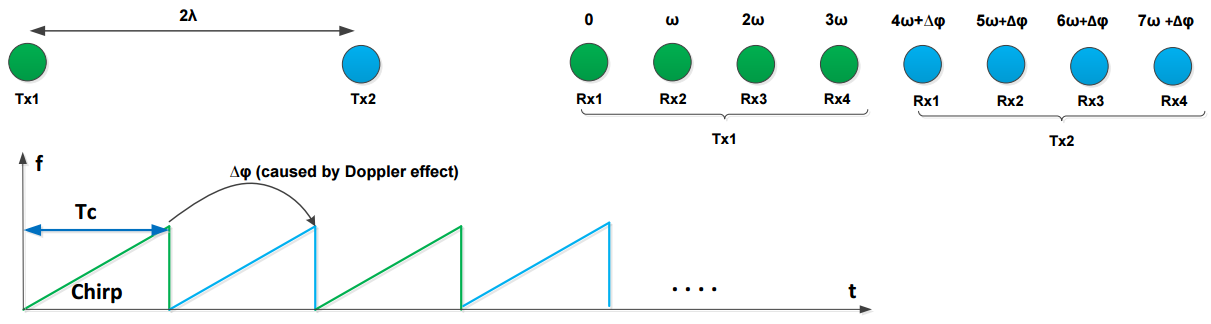
以均匀阵为例,上图为实际天线通道,TX0发射信号被RX0~RX4接收,相位差为0~3w;TX1发射信号也被RX0~RX1接收,由于TX1和TX0间距4d=2λ,相位差为4w~7w。由此,2发4收的实际天线虚拟成1发8收的天线,如下图所示。
由于目标回波到不同接收天线的相位略有差异,因此这里需要对接收信号的模型进行修改,增加相位信息φ(n)。对于每个TX和RX,相位信息φ(n)均不同,和实际天线位置有关,按照上述排列方式,相位信息可以表示为
![]() (7)
(7)
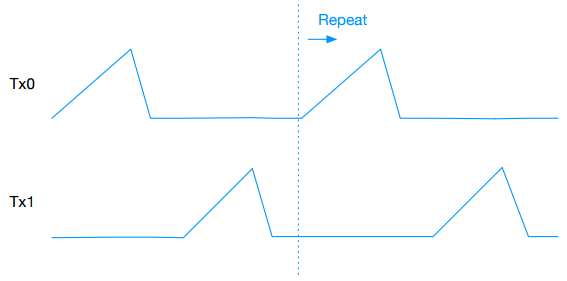
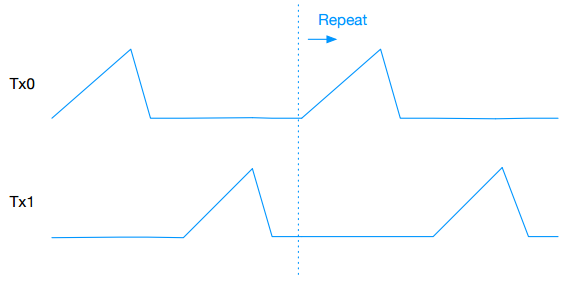
TDM可以采用慢时间分时发射,也可以采用前后chirp组分时发射,这里选择慢时间分时发射,示意图如下所示。两根发射天线分时发射,TX0发射时TX1不工作,目标回波被RX0~RX3接收,存储为Matrix1~Matrix4,然后TX1发射时TX0不工作,目标回波同样被RX0~RX3接收,存储为Matrix5~Matrix8。
Matrix1~Matrix8是原始ADC数据,每个矩阵即是MIMO虚拟后的通道数据,经过类似上述的二维FFT后得到RD频谱图。
与上述单天线形式不同的是,这里多个通道的RD图可以进行非相干积累,改善目标信号质量,提升目标信噪比。
从积累后的RD图中检测出目标,再索引目标在Matrix1~Matrix8的数值,组成一维向量,即是目标的角度信息,然后通过DBF或DML等测角方法估计其角度。
第一根天线和第二根天线之间存在相位偏差Δφ,如下图所示。速度为Vr的运动目标产生多普勒频移Δf和多普勒相位偏差Δφ,可以用公式表示
 (8)
(8)
 (9)
(9)
四、TDM-MIMO仿真
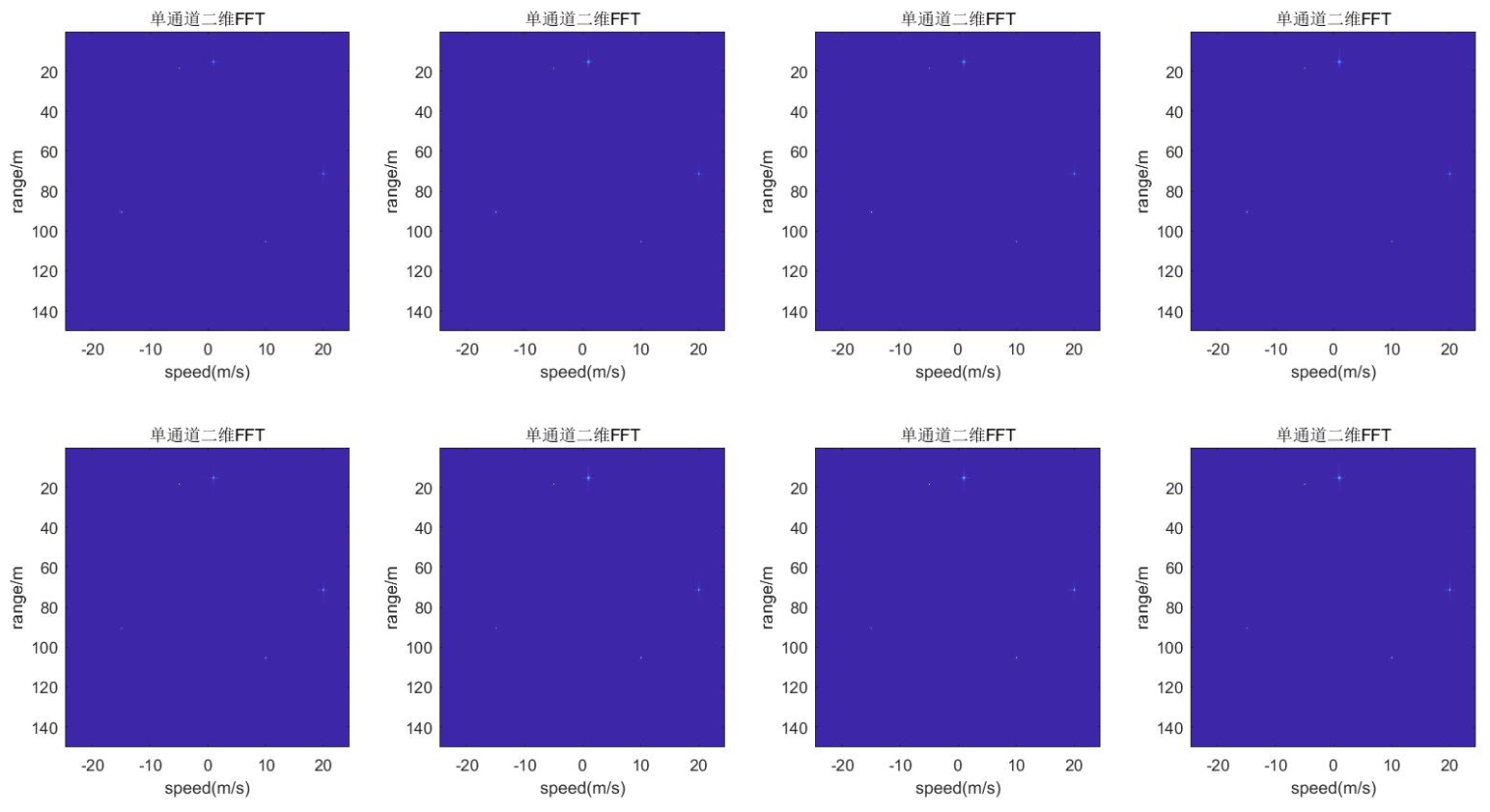
1.多通道二维FFT
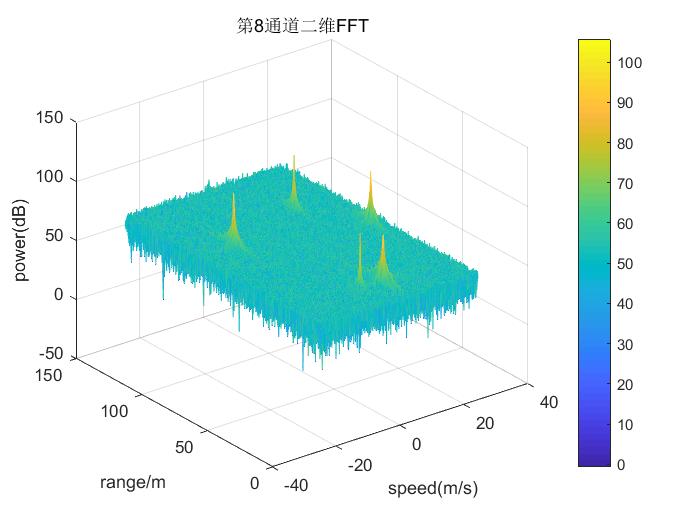
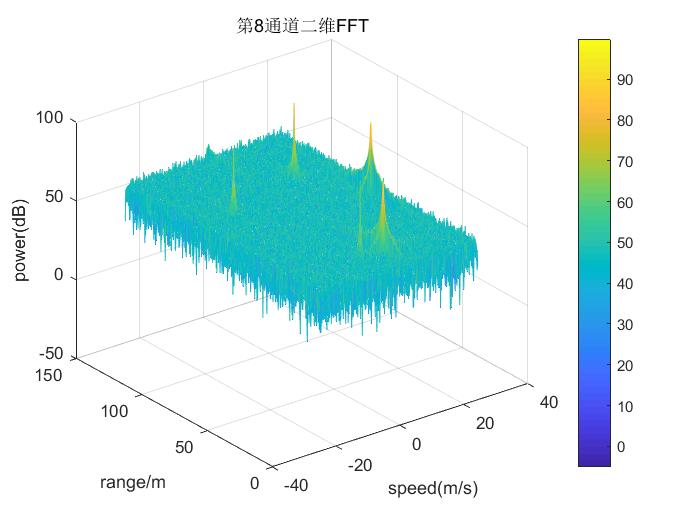
类似单通道的信号处理,这里MIMO虚拟出的8个通道做二维FFT可以得到RD图,如下图所示,每个虚拟的通道都检测出了目标。
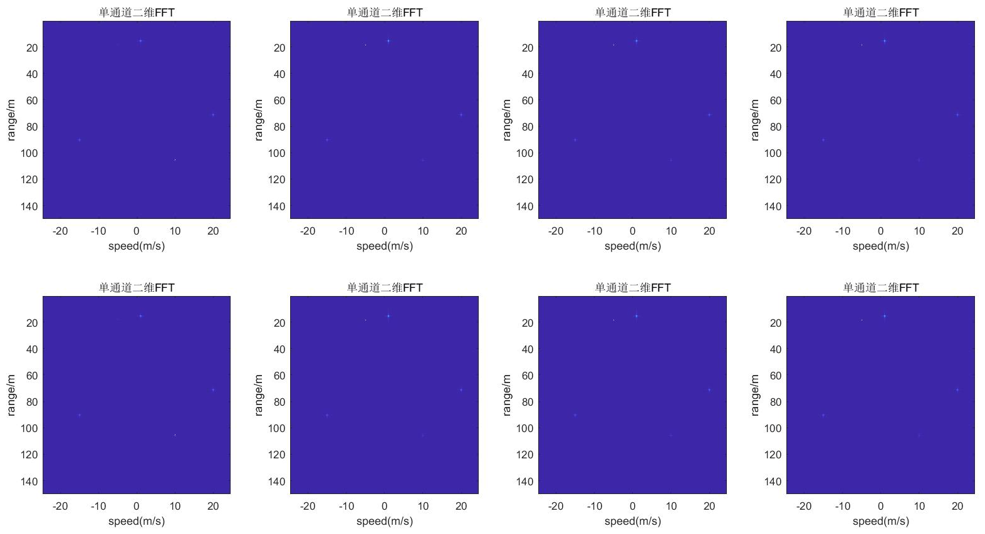
单独看第8通道,除了由于时宽展宽导致的最大不模糊速度减小外,其二维FFT的结果和单发单收模式下几乎一样。
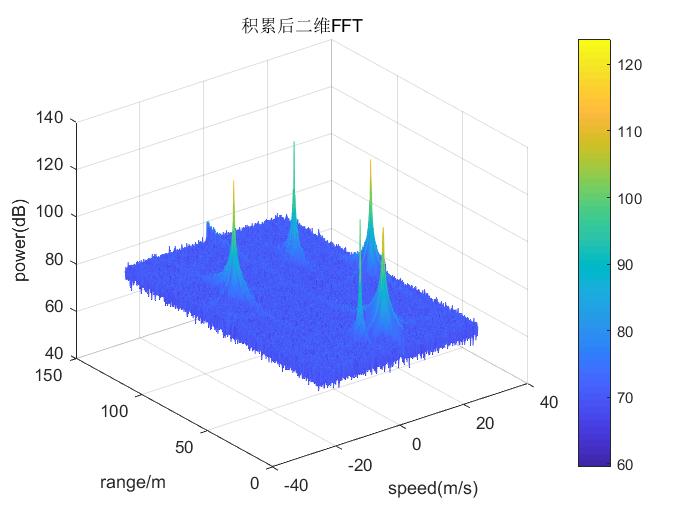
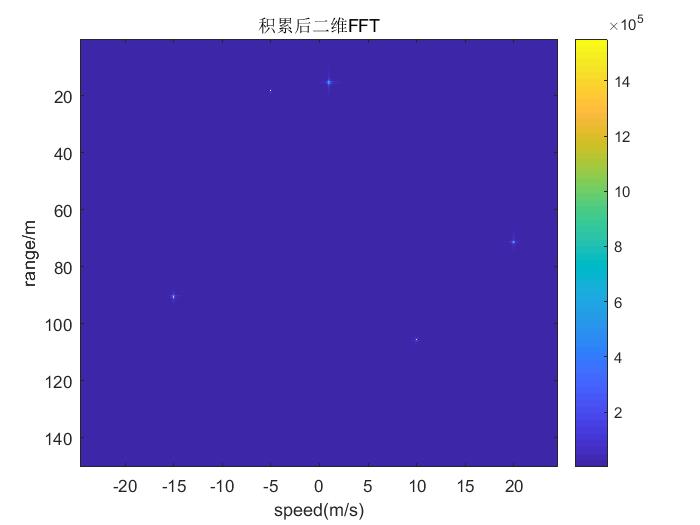
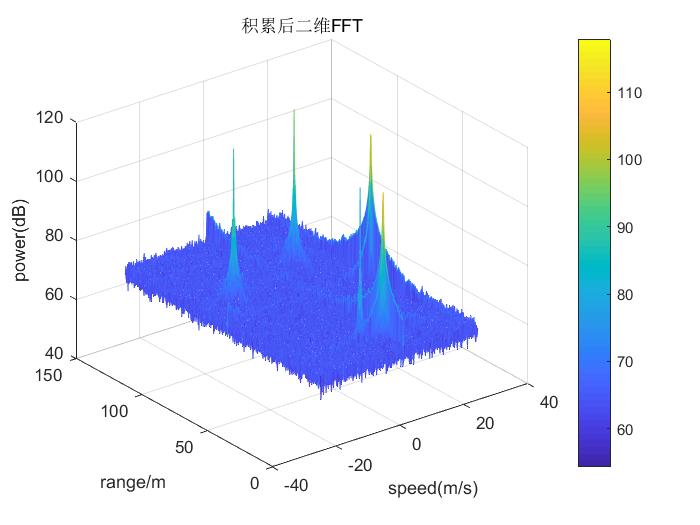
2.多通道非相干积累
由于所有虚拟通道检测的目标在RD图的同一位置,可以通过非相干积累提高信噪比,对比单通道的结果,积累后二维FFT频谱图目标的峰值更高。
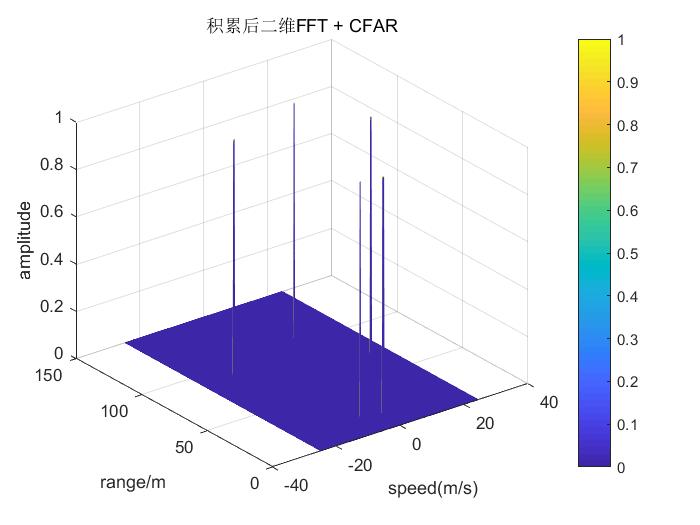
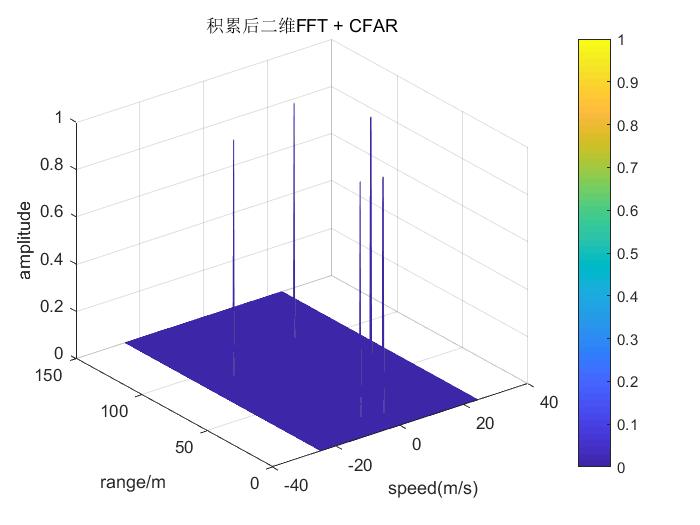
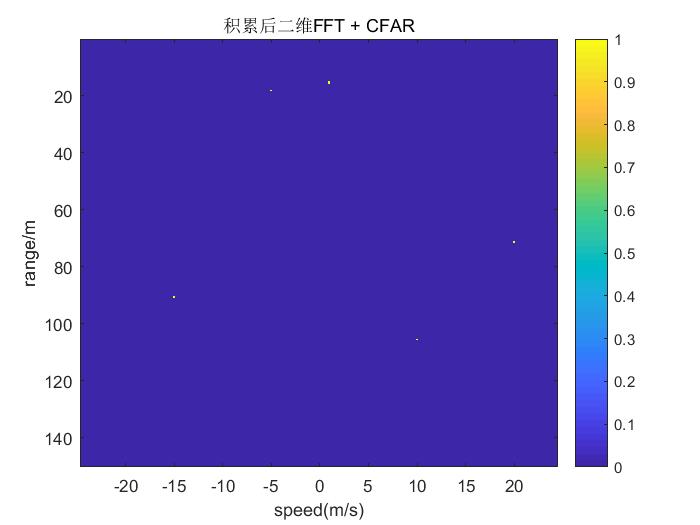
3.恒虚警检测和RD检测结果
类似地,对积累后的二维FFT频谱图进行CFAR检测,得到检测结果如下。
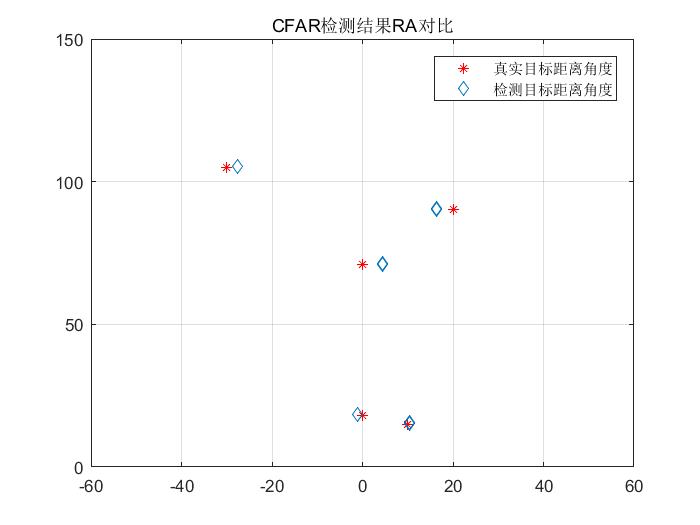
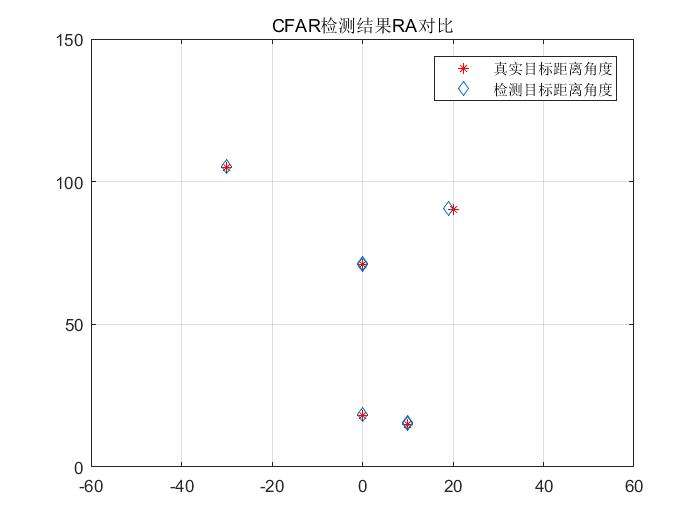
4.角度估计
根据检测的距离和速度索引,提取每个通道的数据,使用DBF进行角度估计,并和目标实际角度对比,可以看到目标速度越快,目标角度偏差越大。
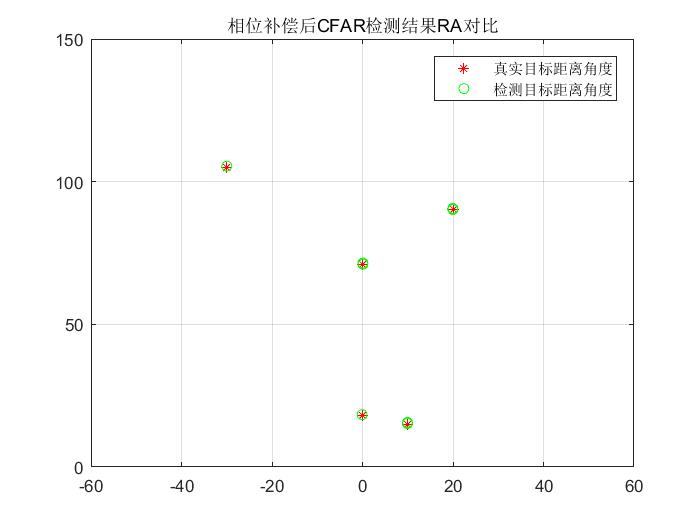
5.多普勒补偿和角度估计
由于存在相位偏差,角度估计有偏差,经过多普勒补偿后,可以缩小角度估计误差。
五、BPM-MIMO工作体制
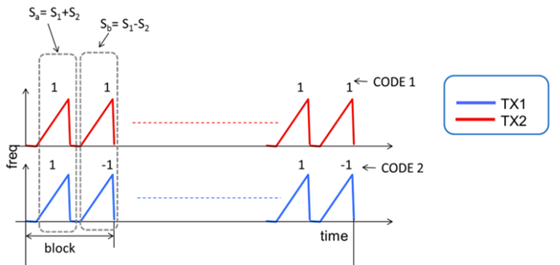
BPM不同于TDM的分时发射,它的多个天线同时发射波形,但对每个发射天线使用二进制相位(相位0°和180°)编码,然后再接收端进行解调分离,发射示意图如下。
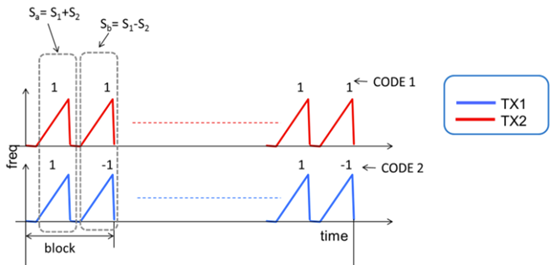
S1是TX1发射信号的chirp,相位为0,因此
 (10)
(10)
S2是TX2发射信号的chirp,第n个chirp的相位为(n-1)π,因此
![]() (11)
(11)
接收天线收到的第1个和第2个chirp为Sa和Sb,则有
![]()
因此有
![]()
以此类推,则可以解调所有通道的chirp。
六、BPM-MIMO仿真
1.一维FFT和二维FFT
在BMP解调前,对接收通道数据做一维和二维FFT,可以看到距离维的峰值对应于真实的目标,而多普勒维最大不模糊速度为TDM模式下的2倍,主要是chirp周期只有TDM模式的一半,但解调后最大不模糊速度相同。

2.多通道二维FFT
解调后,各通道的二维FFT结果和TDM模式相同,如下图。
第8通道的数据也和TDM模型下类似。
后续的检测估计算法和TDM模式相同,下面给出仿真结果。
3.多通道非相干积累

4.恒虚警检测和RD检测结果
5.角度估计
BPM发射波形不存在时延,因此不需要像TDM做补偿,直接做角度估计即可。
七、TDM和BPM增益分析
TDM分时发射,假设和BPM使用相同的chirp,则如下图所示,则TX0在4个chirp周期发送了2个chirp,TX1也是如此。
因此对于TDM而言,两个发射天线在4个chirp周期总共发射了4个chirp。
而BPM同时两个天线发射不同相位编码的chirp,在2个chirp周期内发送了4个chirp,如下图所示。
也就是说,对于BPM,两个发射天线在2个chirp周期可以发送4个chirp,仅为TDM发射时间的一半,效率提升一倍。如果BPM和TDM发射相同的时间,则根据上述的FFT积累增益可知,BPM有约10*log10(2) = 3dB的增益。同理,DDM也有同样的增益。
仿真信号单个发射天线的信号为384个采样点,512个chirp,2发4收形式,BPM耗时为TDM一半,但信号处理后二维FFT的峰值相同。以下仿真说明了这一点。
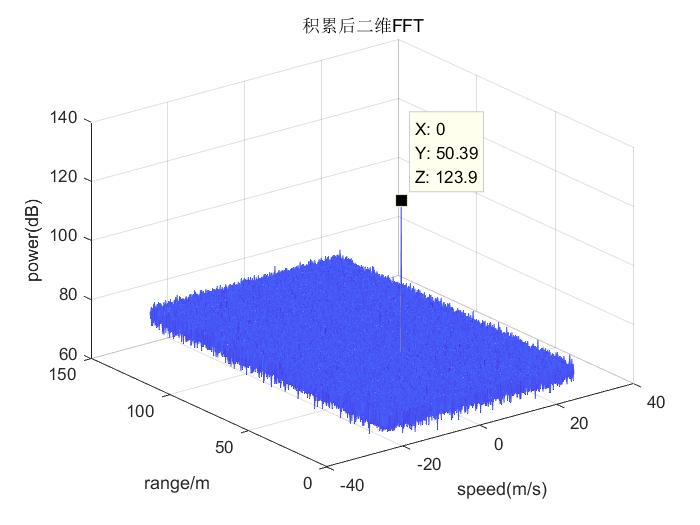
1. TDM积累后增益仿真
对接收信号做二维FFT和多通道积累,可以看到峰值为123.9dB,噪声功率为70.0dB,信噪比为53.9dB。
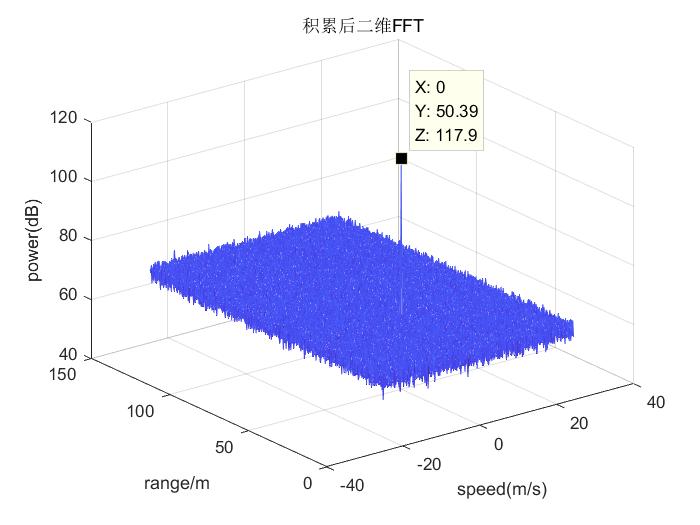
2. BPM积累后增益仿真
BPM同样做二维FFT和多通道积累,其目标峰值为117.9dB,噪声功率为64.0dB,信噪比为53.9dB。
参考资料
《基于 AWR1642 汽车雷达的速度扩展算法研究》
《Modern Radar for Automotive Applications》
加特兰毫米波雷达技术文档