一、环境
开发环境:ubuntu 22 + ros2 humble
发布运行环境:地平线旭日x3派、arm64
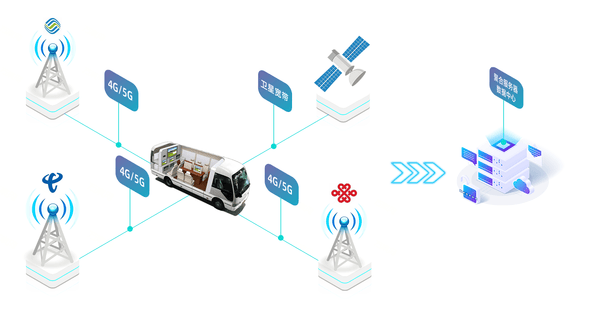
4G 模组: 移远EC20模块
5G 模组:移远RG200U-CN
网络通信模组根据需要选择其中一款, 前期我们使用4G模组,后续迭代因为设计图像影音的传输,打算替换位5G模组
二、4G 模组配置使用
三、5G模组配置和使用
RG200网卡在linux环境中需要安装对应的usb驱动
从官网下载相应开发资料, 根据linux内核选择相应的驱动版本
地平线x3默认内核 4.14.87
开发环境:ubuntu 22 + ros2 humble
发布运行环境:地平线旭日x3派、arm64
4G 模组: 移远EC20模块
5G 模组:移远RG200U-CN
网络通信模组根据需要选择其中一款, 前期我们使用4G模组,后续迭代因为设计图像影音的传输,打算替换位5G模组
RG200网卡在linux环境中需要安装对应的usb驱动
从官网下载相应开发资料, 根据linux内核选择相应的驱动版本
地平线x3默认内核 4.14.87