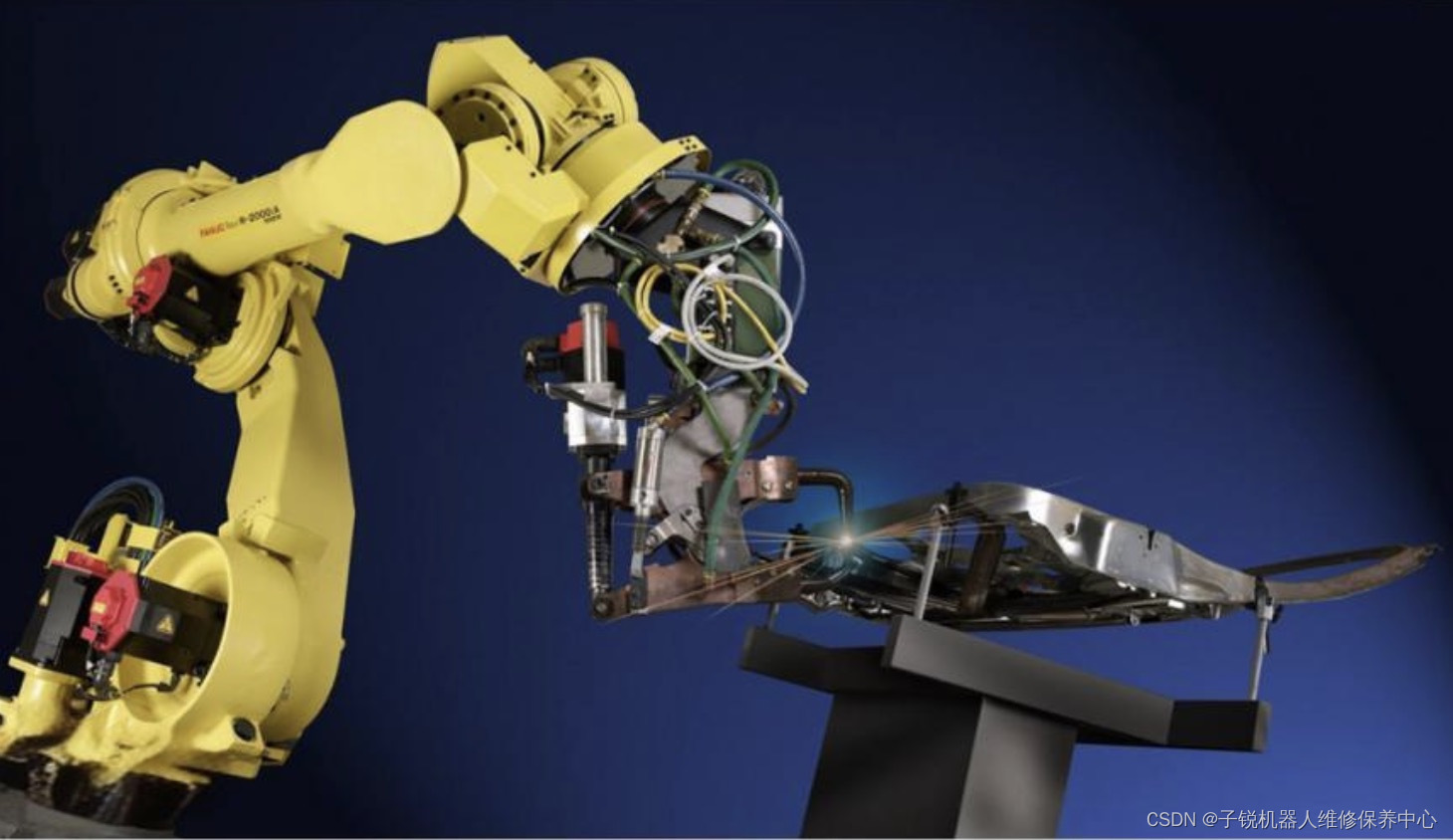
在发那科机器人中,平衡缸扮演着稳定机械臂运动的关键角色。它通过内部的压力调节来平衡负载,保证机器人的精准定位和平稳操作。一旦出现法兰克机械手平衡缸故障或损坏,机器人的性能可能会大打折扣,因此及时且正确的FANUC机械手平衡缸维修至关重要。
一、常见法兰克机械臂R-2000iB平衡缸故障诊断
在处理平衡缸问题时,第一步是准确诊断出故障原因。常见问题包括压力不稳定、密封不良导致的泄露、以及零件磨损等。使用专业的检测工具对FANUC机器人平衡缸进行检查,以确定问题的确切所在是维修流程中不可或缺的一步。
二、详细的FANUC工业机械手平衡缸维修步骤
1. 安全隔离:断开电源,确保机器人处于停机状态,并按照安全规范进行操作。
2. 精确定位:准确地拆卸到需要维修发那科机械臂平衡缸部分。
3. 细致检查:对拆卸下的部件进行检查,确认磨损程度和更换需求。
4. 清洁维护:清除积碳和杂质,必要时更换密封件和其他易损零件。
5. 精确调校:重新组装后,使用压力测试仪器调整法兰克机器人R-2000iB平衡缸压力至出厂标准。
6. 功能测试:完成装配和调整之后,进行系统的功能测试,确保一切工作正常。
发那科机器人R-2000iB平衡缸作为精密设备的核心部分,其维护和机械臂平衡缸修理对于整个系统的稳定运行至关重要。通过与子锐机器人联系,您可以有效解决常见的FANUC机械手R-2000iB平衡缸故障问题,确保生产线的效率和质量得到保障。
子锐机器人FANUC发那科机器人维修常见型号包括:
发那科变压器A03B-0807-C011维修
发那科机器人平衡缸震动维修
FANUC发那科机械手伺服电机A06B-0513-B003维修
FANUC发那科电源模块A06B-6110-H006维修
发那科控制柜风扇A05B-2452-C901维修
发那科机器人A20B-3300-0391控制柜子电路板维修
FANUC发那科驱动器06B-6114-H303维修
发那科喷涂机器人电路板A20B-1007-0680维修