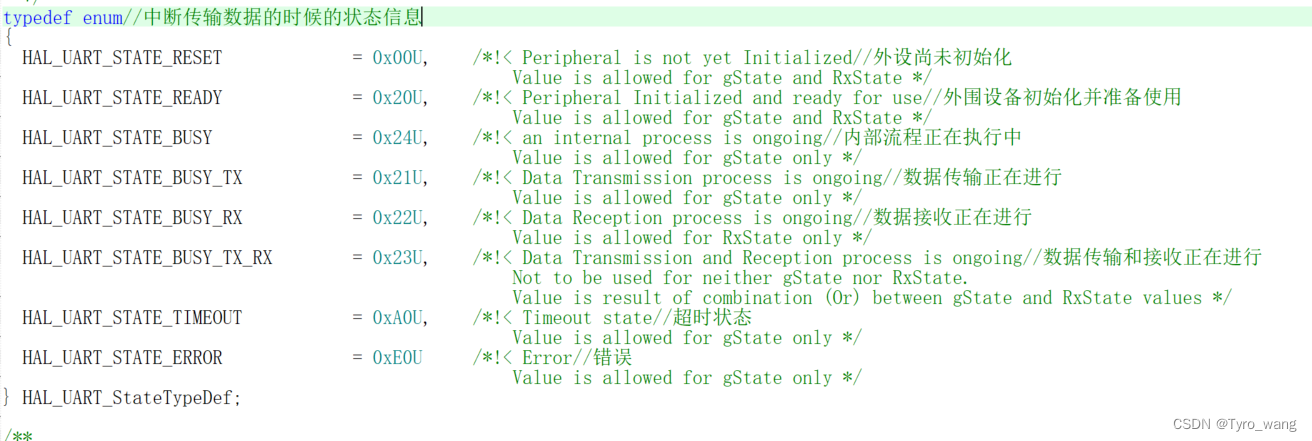
PL_to_PS中断传输数据
实验功能:将PL端的数据存入BRAM,然后在PS端读出数据,用串口打印。通过中断来触发
参考文章:
https://www.cnblogs.com/fhyfhy/p/11760986.html
[ZYNQ_PS与PL通过BRAM交互(三:PSPL读写) - 知乎 (zhihu.com)](https://zhuanlan.zhihu.com/p/661468152)
PL的BD配置
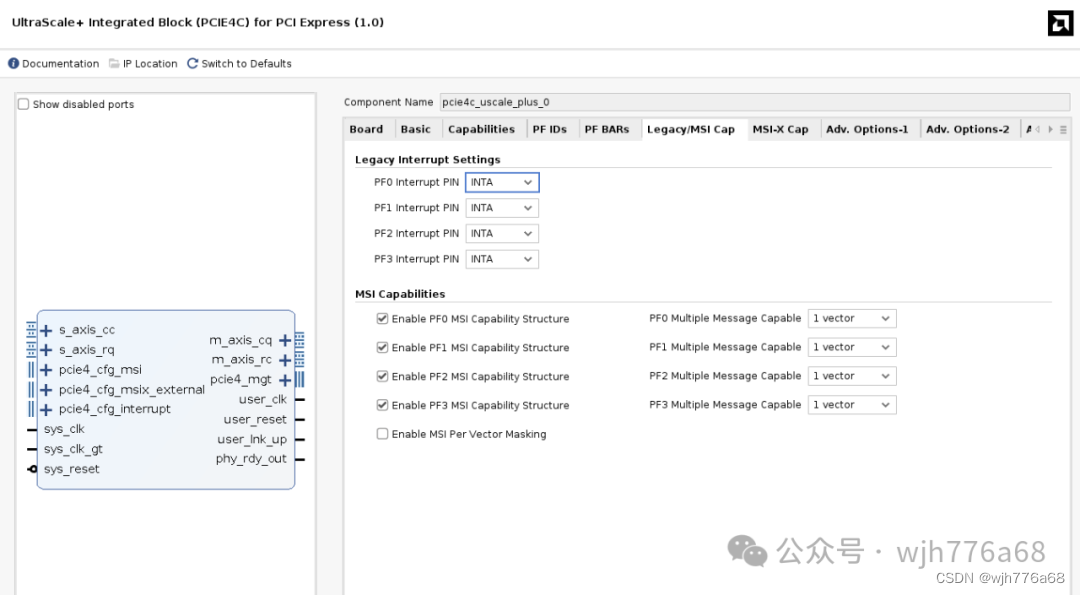
ZYNQ勾选上中断

ZYNQ:

BRAM写入数据
我的工程是将ADC采集的数据进行信号处理,然后写入BRAM传输到PS端进行下一步的处理核分析。

如上图所示,是将数据写入BRAM中的步骤。其中bram_ctrl_0是我自己写的一个模块,它的功能是将数据写入BRAM,并且我加了中断,检测到上升沿启动写过程时,产生一个脉冲中断信号。
bram_ctrl代码如下:
module bram_ctrl(
input clk,
input rst_n,
input valid,
input [31:0] in_data, //写入的数据
output [31:0] addrb,
output reg [31:0] dinb ,
output reg [3:0] web ,
output reg PL_IRQ0 //脉冲中断信号
);
/************** **************/
/************** 信号定义 **************/
/************** **************/
//PL写RAM
wire [31:0]AddrEndValueVio; //控制写的地址范围
wire [31:0]dinbValueVio; //控制写的数据数值
wire [3:0] webVio; //控制写的有效字节位
wire [0:0] valid; //启动写数据
reg [0:0]valid1;//对writeEnVio延迟一个clk
reg [0:0]wrState; //写数据状态:0代表IDLE.1代表正在写
reg [31:0]addrbWrite;//写数据地址
//Ohter signals
assign addrb = wrState?addrbWrite:32'd0;
reg [0:0]wrStateReg;
/************** **************/
/************** PL 写入BRAM **************/
/************** **************/
always@(posedge clk)begin
if(!rst_n)begin
valid1 <= 1'b0;
end
else begin
valid1 <= valid;
end
end
always@(posedge clk)begin
if(!rst_n)begin
dinb[31:0] <= 32'd0;
web[3:0] <= 4'd0;
wrState <= 1'b0;
addrbWrite[31:0] <= 32'd0;
end
else begin
case(wrState)
1'b0:
if(valid&~valid1)begin//边沿检测,检测到上升沿启动写过程
wrState <= 1'b1;
web[3:0] <= 4'b1111;
addrbWrite[31:0] <= 32'd0;
dinb[31:0] <= in_data[31:0];
end else begin
wrState <= wrState;
web[3:0] <= 4'd0;
addrbWrite[31:0] <= 32'd0;
dinb[31:0] <= 32'd0;
end
1'b1:
if(addrbWrite[31:0] >= 32'd2012)begin
wrState[0:0] <= 1'b0;
web[3:0] <= 4'd0;
addrbWrite[31:0] <= 32'd0;
dinb[31:0] <= 32'd0;
end
else begin
wrState[0:0] <= wrState[0:0];
web[3:0] <= 4'b1111;
addrbWrite[31:0] <= addrbWrite[31:0] + 32'd4;
// dinb[31:0] <= in_data[31:0];//写入每个地址相同数据
//dinb[31:0] <= dinb[31:0] + 32'd1; //写入每个地址数据累加1
dinb[31:0] <= dinb[31:0]; //保持
end
endcase
end
end
//中断
always@(posedge clk)begin
if(!rst_n)begin
PL_IRQ0 <= 1'b0;
end
else if(valid&~valid1) begin
PL_IRQ0 <= 1'b1;
end
else
PL_IRQ0 <= 1'b0;
end
endmodule
代码解释:一共有三个always语句块。
第一个是将valid寄存一个拍,为了后续的边沿检测。
第二个是数据写入,用了一个状态机。if(valid&~valid1) 当检测到valid的上升沿时,开始写入数据。
第三个是产生一个中断信号PL_IRQ0。由valid的上升沿触发产生。
以上是PL端的工作,下面是PS的工作
PS 代码思路解释
建立项目的模板选用《Hello World》
将主函数修改为:
#include <stdio.h>
#include "platform.h"
#include "xil_printf.h"
#include "xscugic.h"
#include "xil_exception.h"
#include "xparameters.h"
#include "xparameters_ps.h"
#include <xil_io.h>
#define INTC_DEVICE_ID XPAR_SCUGIC_0_DEVICE_ID
#define ADC0_BRAM_ADDR XPAR_ADC0_AXI_BRAM_CTRL_0_S_AXI_BASEADDR
#define ADC1_BRAM_ADDR XPAR_ADC1_AXI_BRAM_CTRL_0_S_AXI_BASEADDR
static XScuGic INTCInst;
static void SW0_intr_Handler();
static int IntcInitFunction(u16 DeviceId);
// 中断服务函数
void psReadBram()
{
int ADC0_data;
int ADC1_data;
printf("Interrupt detected!\r\n");
printf("This is psReadBram function\r\n");
ADC0_data = Xil_In32(ADC0_BRAM_ADDR + 4);
ADC1_data = Xil_In32(ADC1_BRAM_ADDR + 4);
printf("ADC0_data:%d \r\n",ADC0_data);
printf("ADC1_data:%d \r\n",ADC1_data);
}
int IntcInitFunction(u16 DeviceId)
{
XScuGic_Config *IntcConfig;
int status;
// Interrupt controller initialisation
IntcConfig = XScuGic_LookupConfig(DeviceId);
status = XScuGic_CfgInitialize(&INTCInst, IntcConfig, IntcConfig->CpuBaseAddress);
if(status != XST_SUCCESS) return XST_FAILURE;
// Call to interrupt setup
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler)XScuGic_InterruptHandler,
&INTCInst);
Xil_ExceptionEnable();
// Connect PL interrupt to handler
status = XScuGic_Connect(&INTCInst,
XPS_FPGA0_INT_ID,
(Xil_ExceptionHandler)psReadBram,
(void *)1);
if(status != XST_SUCCESS) return XST_FAILURE;
// Set interrupt type of PL to rising edge
XScuGic_SetPriorityTriggerType(&INTCInst, XPS_FPGA0_INT_ID, 0x00, 0x03);
// Enable PL interrupts in the controller
XScuGic_Enable(&INTCInst, XPS_FPGA0_INT_ID);
return XST_SUCCESS;
}
int main()
{
init_platform();
IntcInitFunction(INTC_DEVICE_ID);
RF_init();
while(1);
cleanup_platform();
return 0;
}
代码解释:一个中断函数 IntcInitFunction;一个中断服务函数 psReadBram;一个主函数 main
其中main函数中的 RF_init(); 是我的ADC采集初始化函数。
#define ADC0_BRAM_ADDR XPAR_ADC0_AXI_BRAM_CTRL_0_S_AXI_BASEADDR
#define ADC1_BRAM_ADDR XPAR_ADC1_AXI_BRAM_CTRL_0_S_AXI_BASEADDR
这两个宏定义是两个BRAM的地址。(我用了两个ADC,写入两个BRAM中)
在中断服务函数psReadBram中,我将ADC0_BRAM_ADDR + 4 该地址的数据读出来赋值给ADC0_data,然后打印出来。
结果
ILA抓取信号

如上图,框起来的就是中断信号,它检测到valid信号的上升沿后,拉高一个高电平。
并且可以看出,此时写入BRAM的数据 ADC1_atan_out 为 -843314201
PS串口打印信息

满足功能!