为什么是立体视觉?
ADAS 立体视觉是指使用两个摄像头(类似于人眼)从略有不同的角度捕获图像的技术。该设置模仿人类双眼视觉,使系统能够感知环境的深度和 3D 结构。
立体视觉的关键技术方面
ADAS 立体视觉具有多种优势和高度复杂的功能。让我们探索它们以更好地理解:
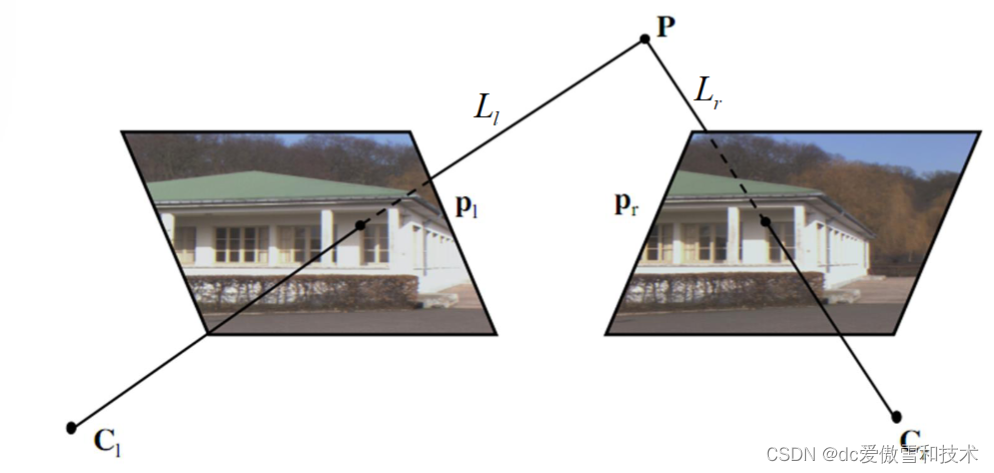
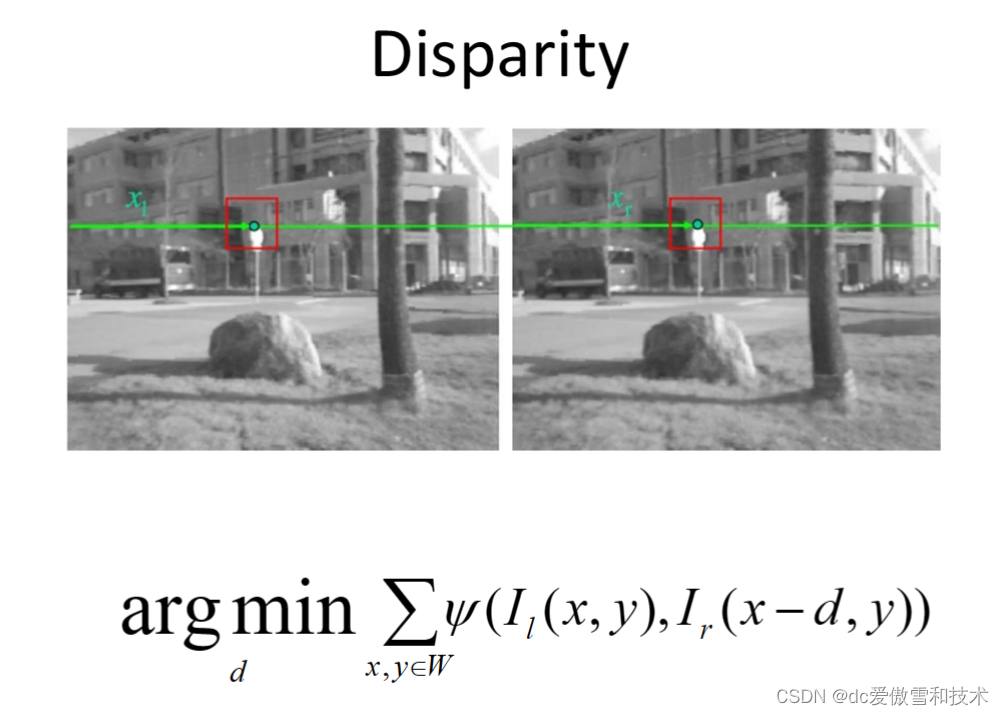
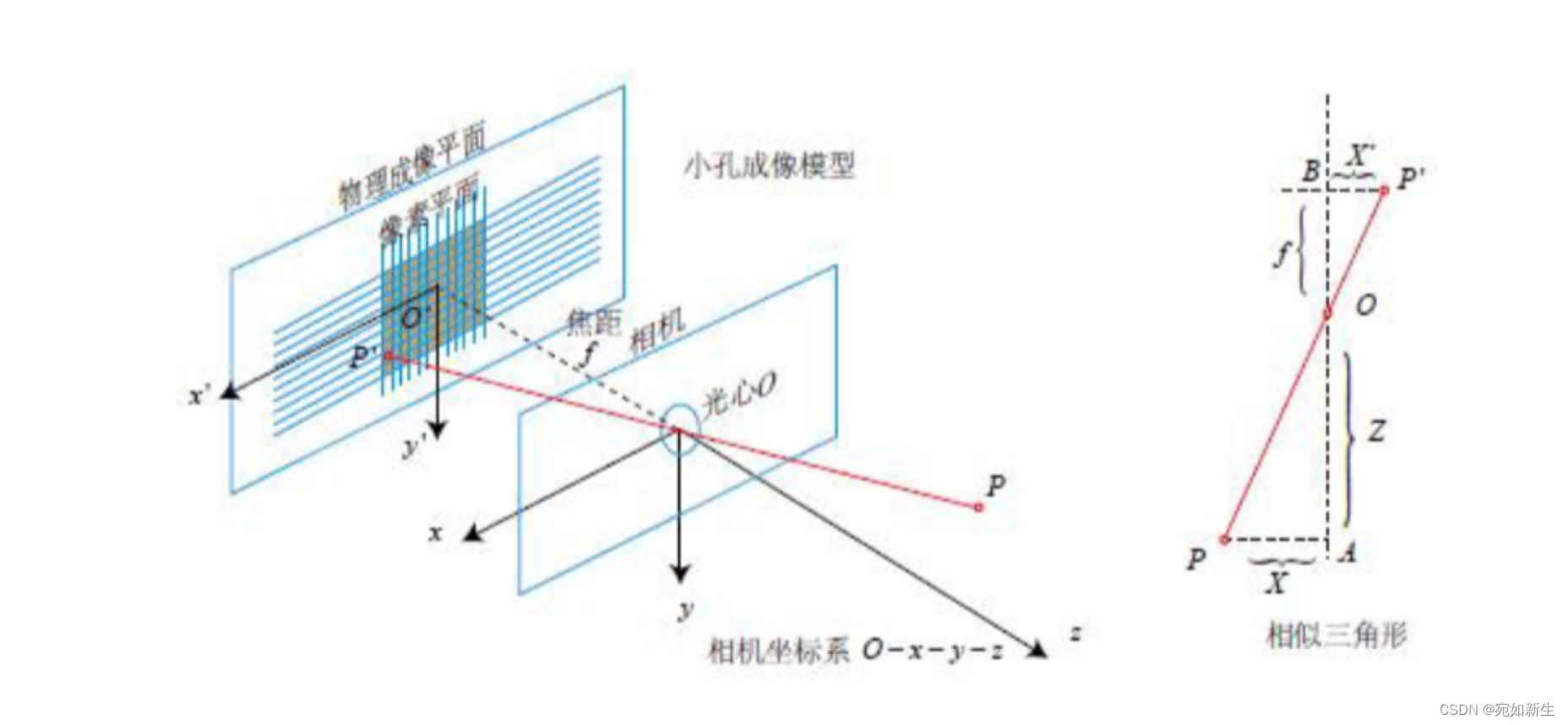
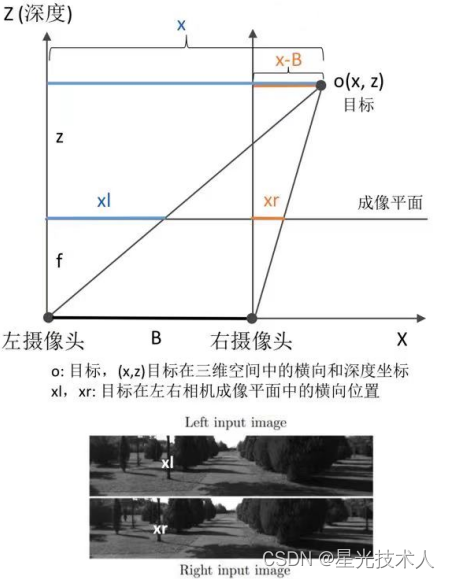
- 对极几何和深度估计:立体视觉依赖于对极几何,这是计算机视觉中的一个基本概念,描述了立体设置的两个视图之间的几何关系。通过查找一对图像中的对应点(边缘或角等特征),系统计算视差(两幅图像中相似特征的坐标差)。这种差异与相机的场景深度成反比,从而可以进行深度估计。
- 3D 重建和点云生成:
































![[opencv]VideoWriter写出fourcc格式](https://img-blog.csdnimg.cn/img_convert/afdb02941c94f993a373bed9bc3d26a6.png)
