Gazebo提供了一些交互工具,允许你直接通过图形界面操作模型:
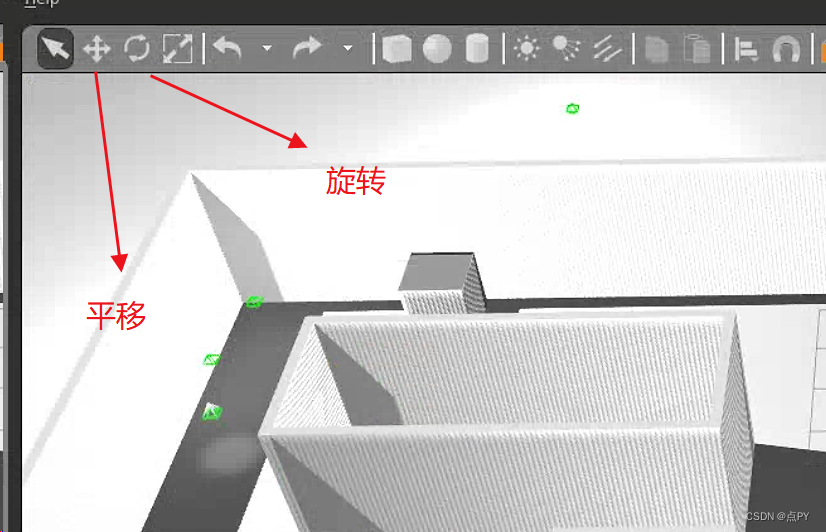
启动Gazebo后,在右侧工具栏中,你会找到一个可以拖拽物体的图标(通常是一个手掌图标或者类似的)。点击这个图标。
随后,你可以用鼠标点击并拖拽小车,将其翻回正位。你可能需要在三维空间中调整视角,以便更好地控制小车的位置和方向。
Gazebo提供了一些交互工具,允许你直接通过图形界面操作模型:
启动Gazebo后,在右侧工具栏中,你会找到一个可以拖拽物体的图标(通常是一个手掌图标或者类似的)。点击这个图标。
随后,你可以用鼠标点击并拖拽小车,将其翻回正位。你可能需要在三维空间中调整视角,以便更好地控制小车的位置和方向。