一、基本原理
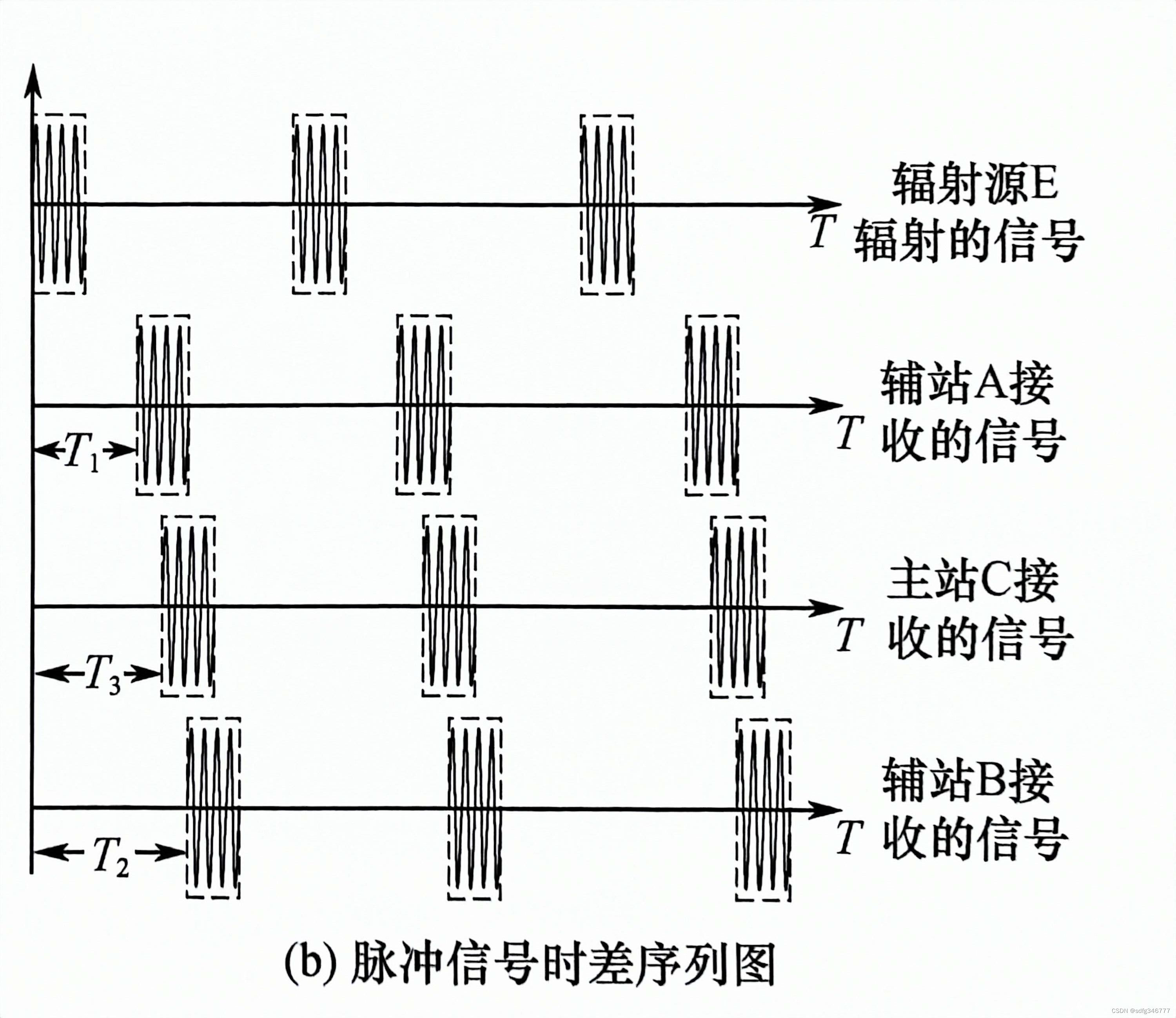
时差定位系统由一个中心站和两个以上的辅站组成,定位原理如下图(a)所示。主站以及辅站的位置均已知,并且接收辐射源信号,测出雷达发射的脉冲信号到达A,C两个基站之间的时间差,如图(b),乘光速可以得到两站之间的距离差
。以A,C站为焦点,可以唯一确定一条双曲线(应该由
是大于0还是小于0,确定一条),以B,C站为焦点,同理,可以得如下两条双曲线,交点即为所求的辐射源
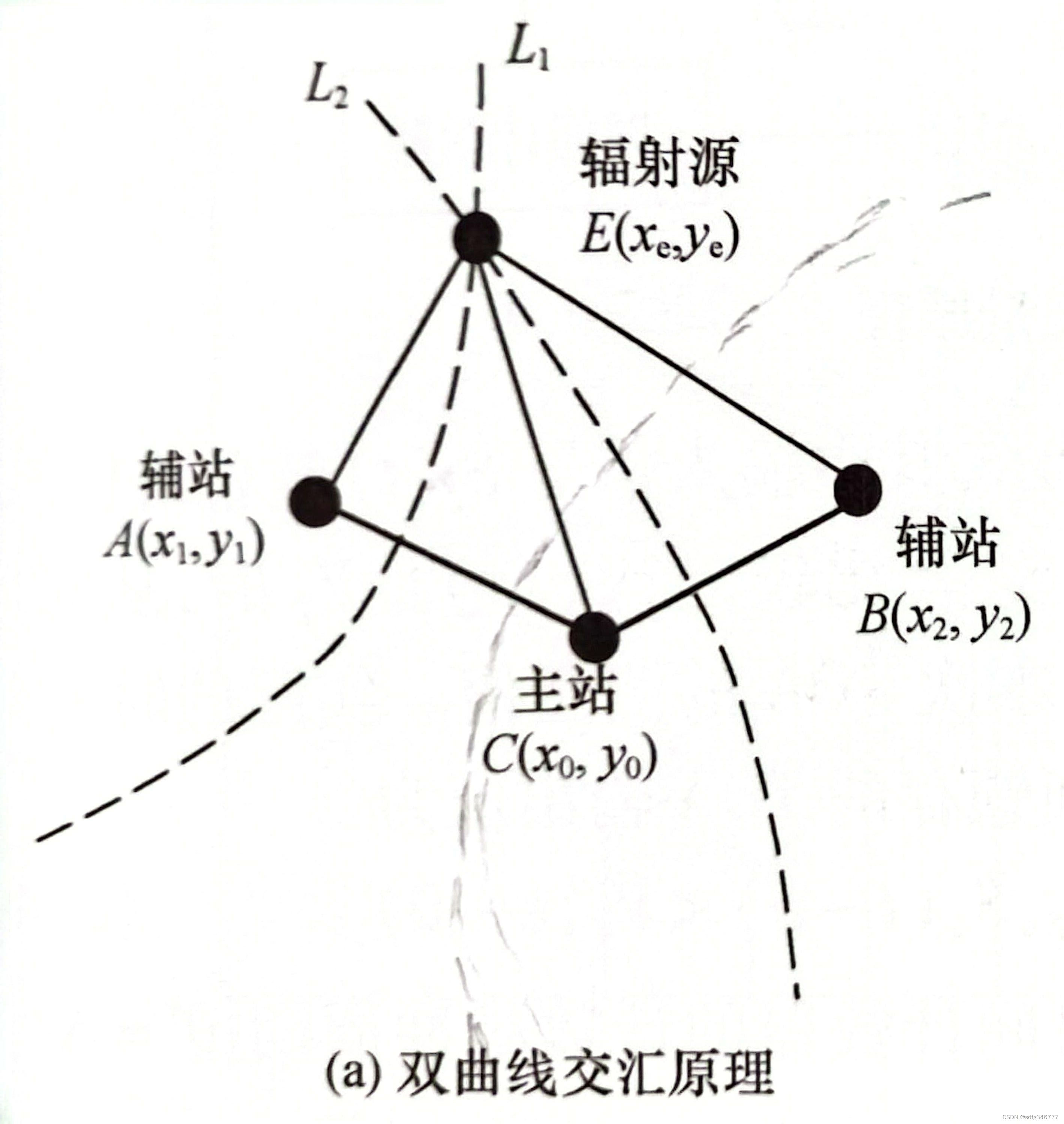
由此可见,双曲线时差定位系统至少要由3个观测站组成,3个观测站可确定两条双曲线,这两条双曲线最多有两个焦点,如果有一个焦点,则不存在定位模糊,如果有两个焦点,那么这两个焦点必然位于基线两侧(两观测站所在直线),这时可能会产生定位模糊。
二、算法推导
其中r1为主站到辐射源的距离,ri为第i个辅站到辐射源的距离,均为未知量,主站和辅站的坐标和
均为已知量。
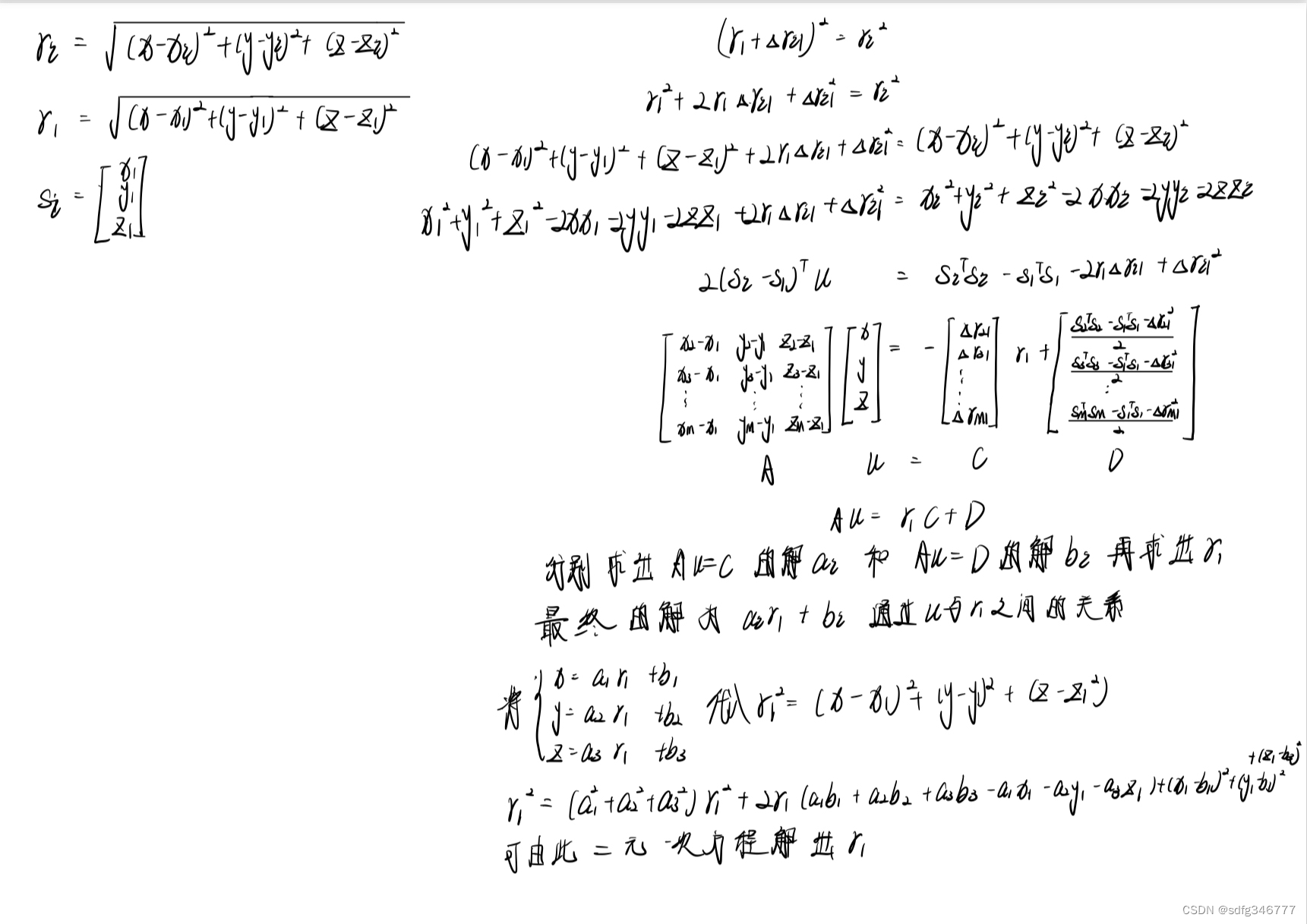
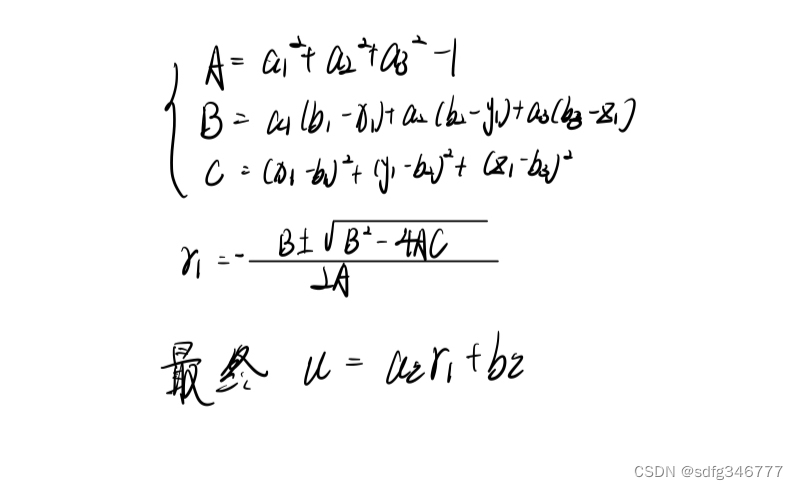 由以上公式推导即可算出辐射源的三维坐标。
由以上公式推导即可算出辐射源的三维坐标。