今天博主和大家分享一下在GX Works2 中对PLC一体机编程,实现步进电机自动正反转的程序。
程序如下:
该程序有几个重要的地方和大家分享一下:
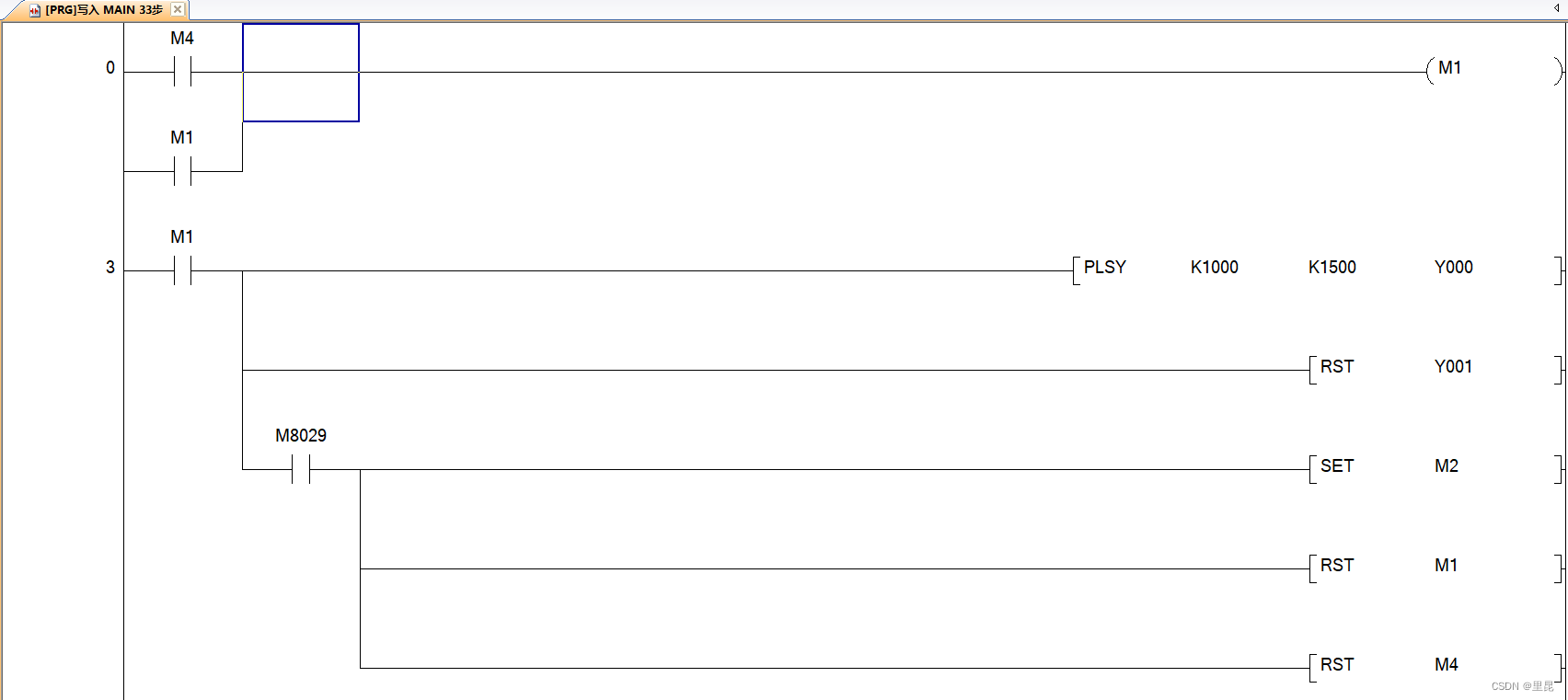
1、程序以中间寄存器M4开头。
博主想通过PLC一体机上的触摸屏控制程序是否运行,因此一开始试了一下输入点X001,但是发现触摸屏上无法实现对输入点X状态的改变,只能改变中间寄存器M的状态,因此博主这里用了M4,朋友们也可以用M的其它点。
2、程序中实现了对M1中间寄存器的自锁。
即连通M4后,M1持续连通。
3、程序采用了模块化的设计。
即M1控制电机正转,M2控制电机反转。M8029是特殊中间寄存器,只有当本步脉冲结束后才连通。在M1控制的正转过程中,脉冲完成后,先将控制转向的输出口Y001复位,即RST Y001,;正转结束后,首先连通控制反转的M2,即SET M2,同时断开M1,即RST M1;
此时注意,还需要将M4断开,具体原因博主还没有找到,但是如果不断开M4,则无法实现自动正/反转切换,因此程序里有RST M4。
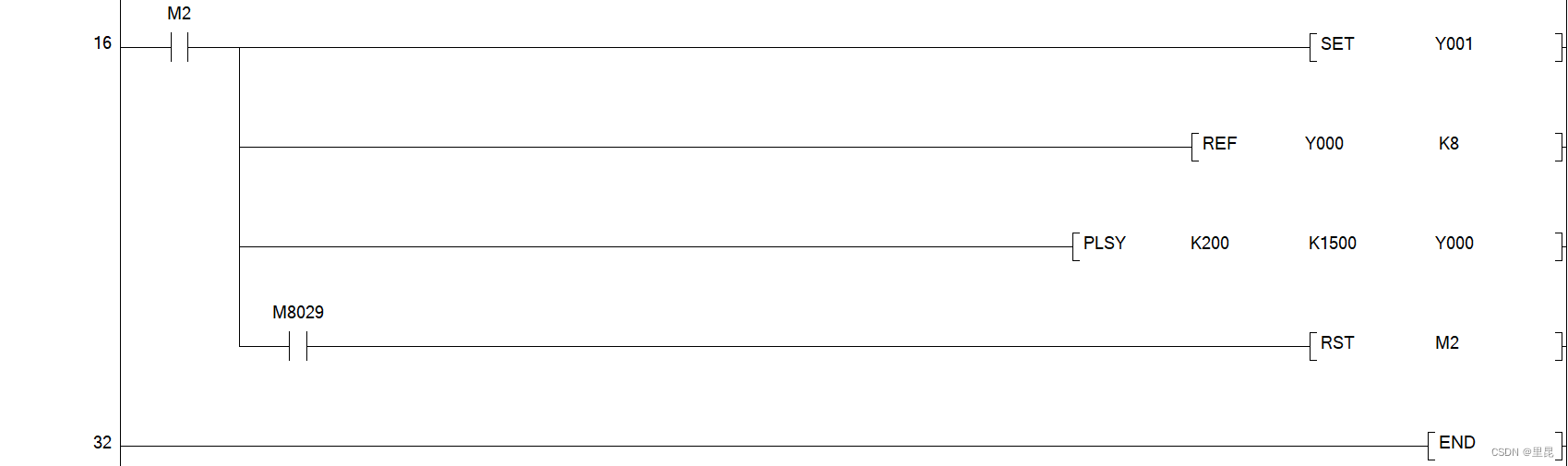
4、步进电机反转控制。
首先,改变转向,即SET Y001;然后将转速初始化,即REF Y000 K8;然后再重新设定反转的脉冲;最后同样在反转控制中,在M8029连通后,将M2断开,全程序结束。
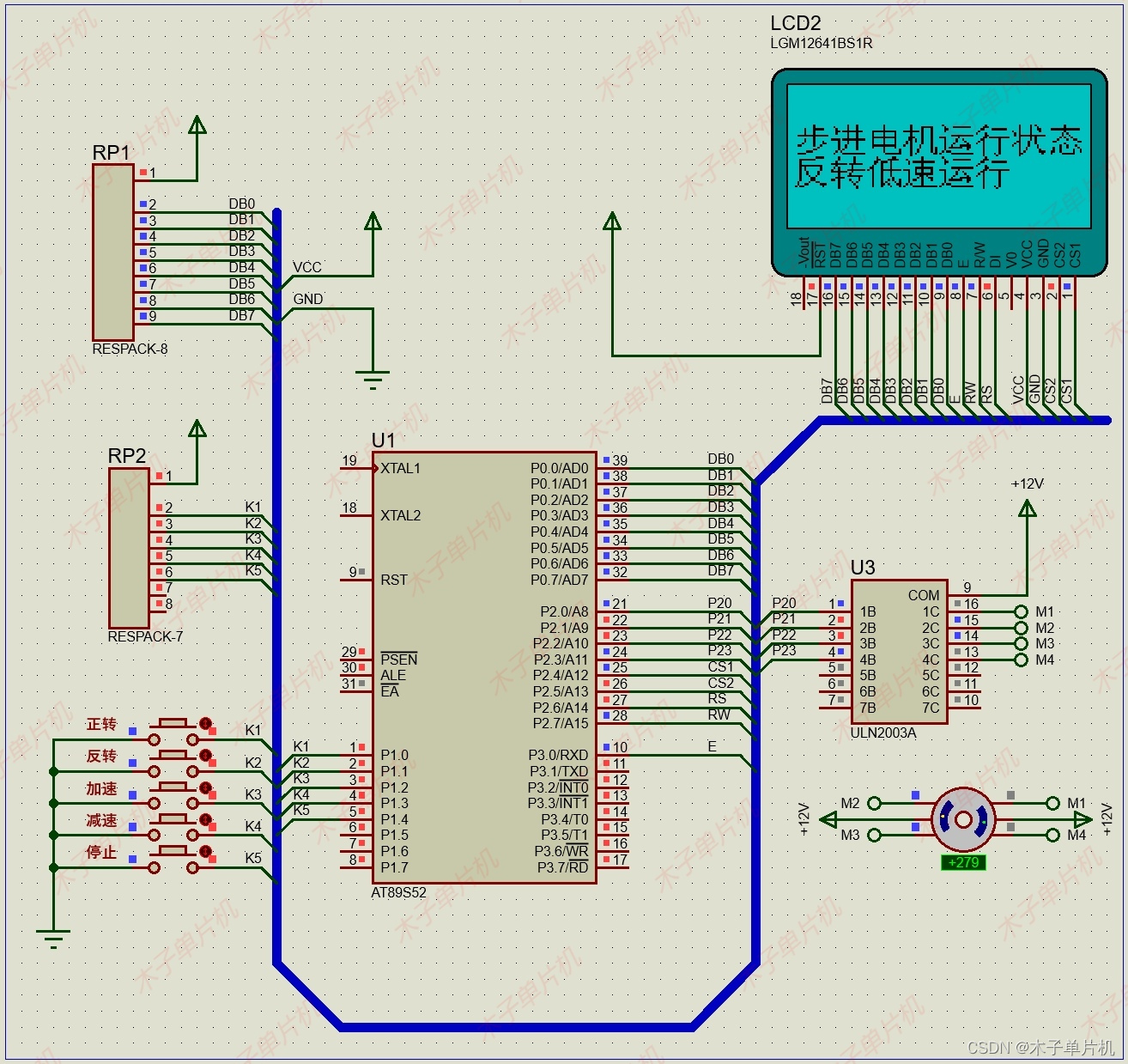
最后,在PLC一体机中显示屏控制如下: