基于STM32和HC-SR04模块实现超声波测距功能
本文用的单片机是STM32F103C8T6,超声波测距模块是HC-SR04,显示距离是通过上位机显示。
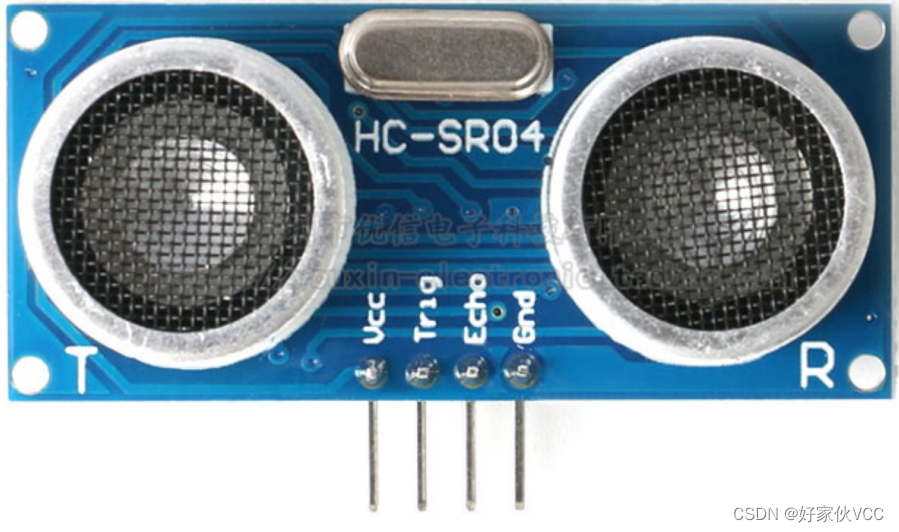
HC-SR04硬件概述
HC-SR04超声波距离传感器的核心是两个超声波传感器。一个用作发射器,将电信号转换为40 KHz超声波脉冲。接收器监听发射的脉冲。如果接收到它们,它将产生一个输出脉冲,其宽度可用于确定脉冲传播的距离。就是如此简单!
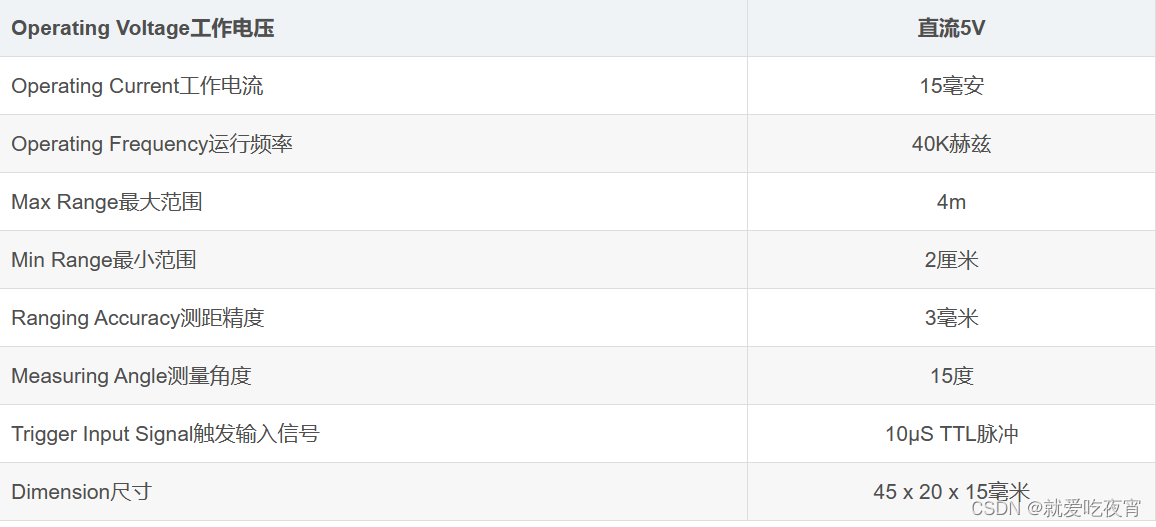
该传感器体积小,易于在任何机器人项目中使用,并提供2厘米至400厘米(约1英寸至13英尺)之间出色的非接触范围检测,精度为3mm。
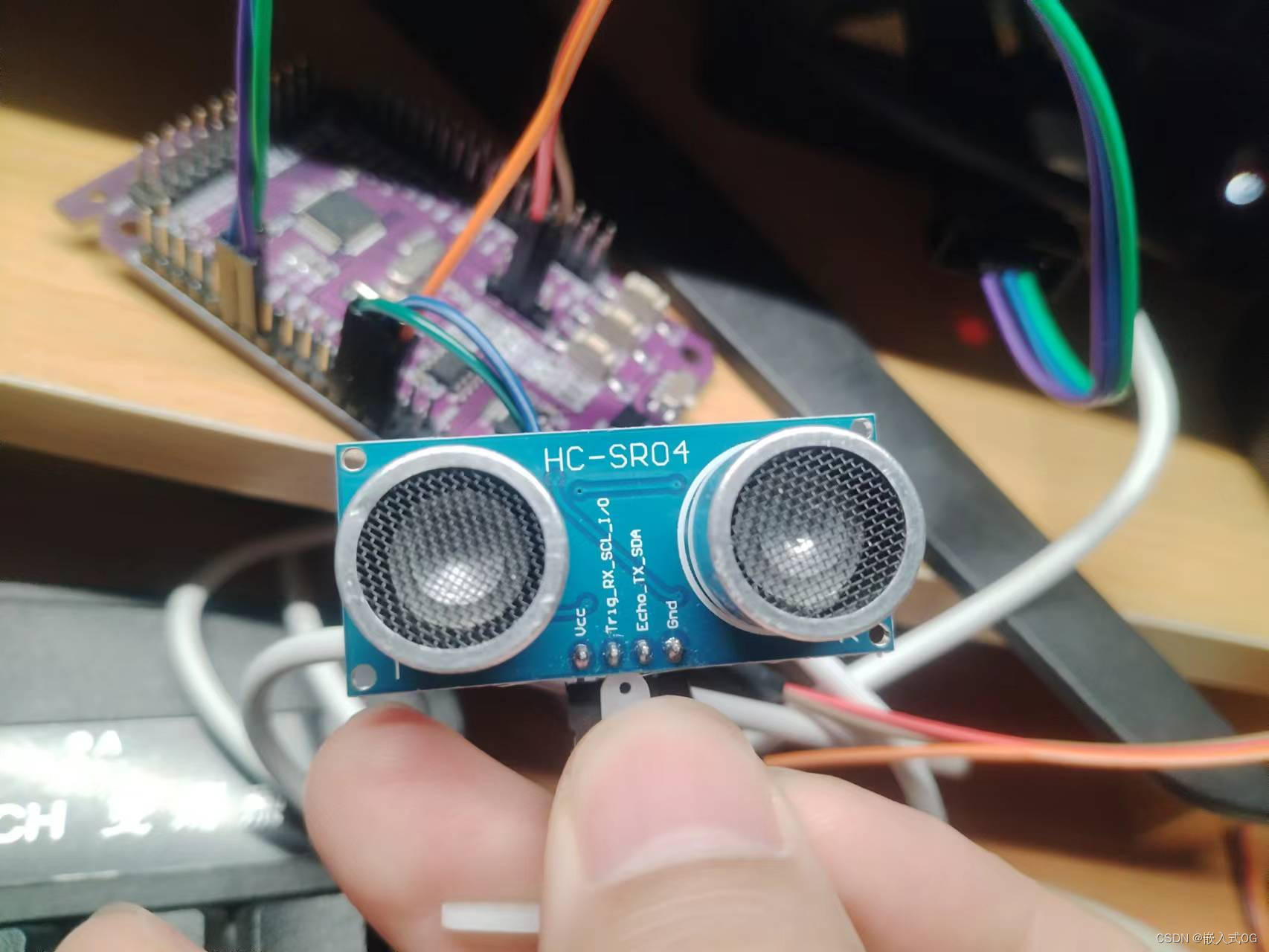
HC-SR04超声波传感器引脚定义

让我们看一下它的引脚排列。
VCC 是HC-SR04超声波距离传感器的电源,我们连接了5V的供电。
Trig (Trigger) 引脚用于触发超声波脉冲,下面例程中用的GPIOB5,所以连接STM32的GPIOB5。
Echo 回声当接收到反射信号时,引脚产生一个脉冲。脉冲的长度与检测发射信号所需的时间成正比,下面例程中用的GPIOB6,所以连接STM32的GPIOB6。
GND 应该连接到STM32的地。
HC-SR0如何工作?
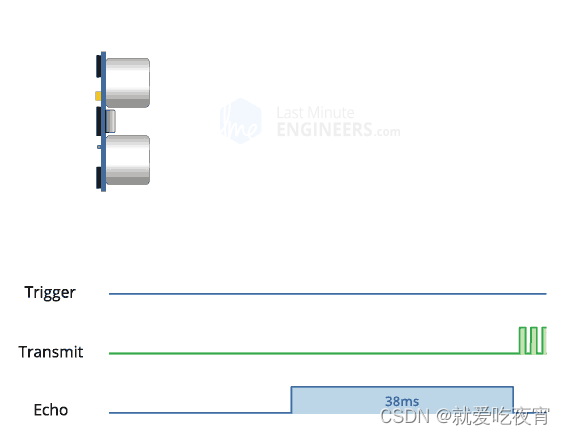
当持续时间至少为10 µS(10微秒)的脉冲施加到触发引脚时,一切就开始了。响应于此,传感器以40 KHz发射八个脉冲的声音脉冲。这种8脉冲模式使设备的“超声特征”变得独一无二,从而使接收器能够将发射模式与环境超声噪声区分开。
八个超声波脉冲通过空气传播,远离发射器。同时,回声引脚变为高电平,开始形成回声信号的开始。
如果这些脉冲没有被反射回来,则回波信号将在38毫秒(38毫秒)后超时并返回低电平。因此38 ms的脉冲表示在传感器范围内没有阻塞。
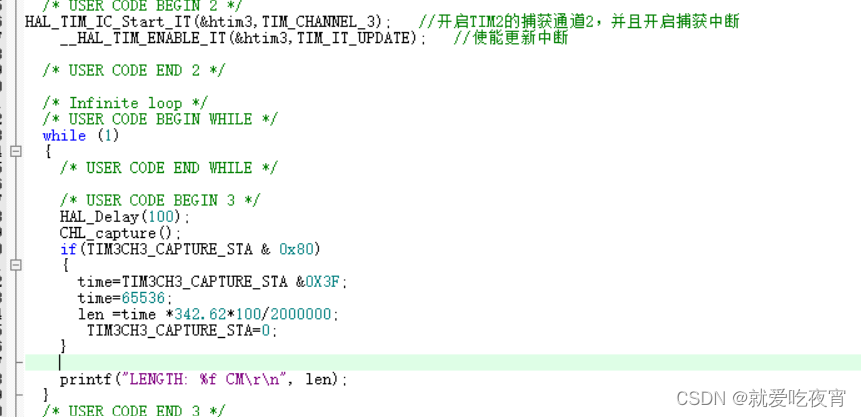
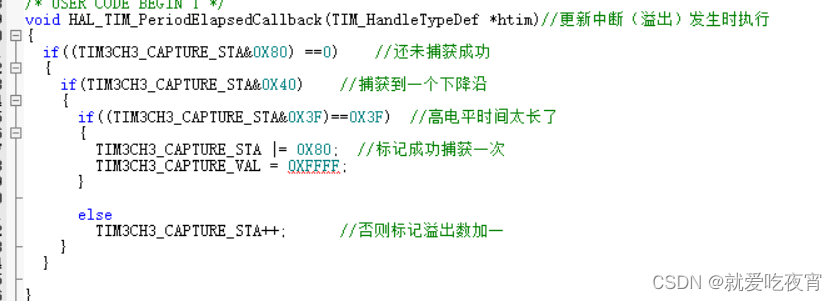
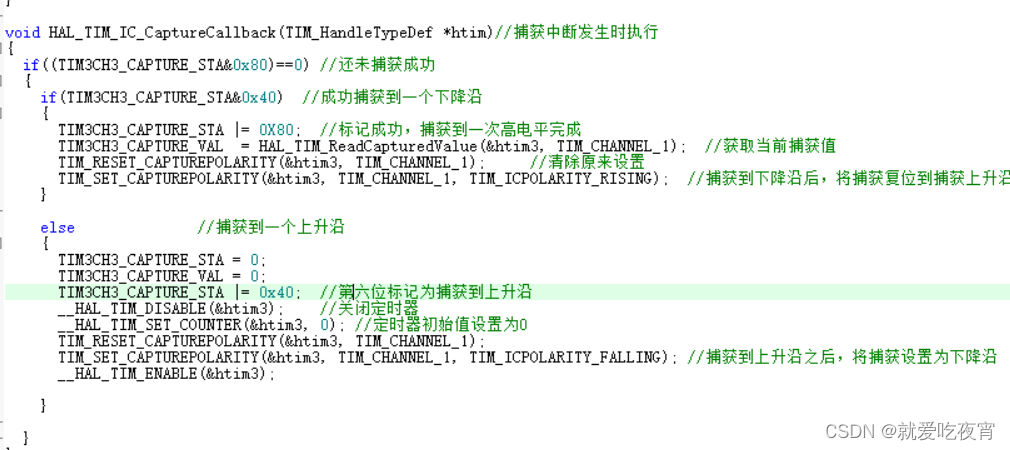
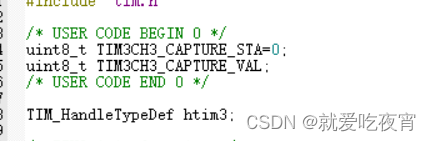
部分代码:
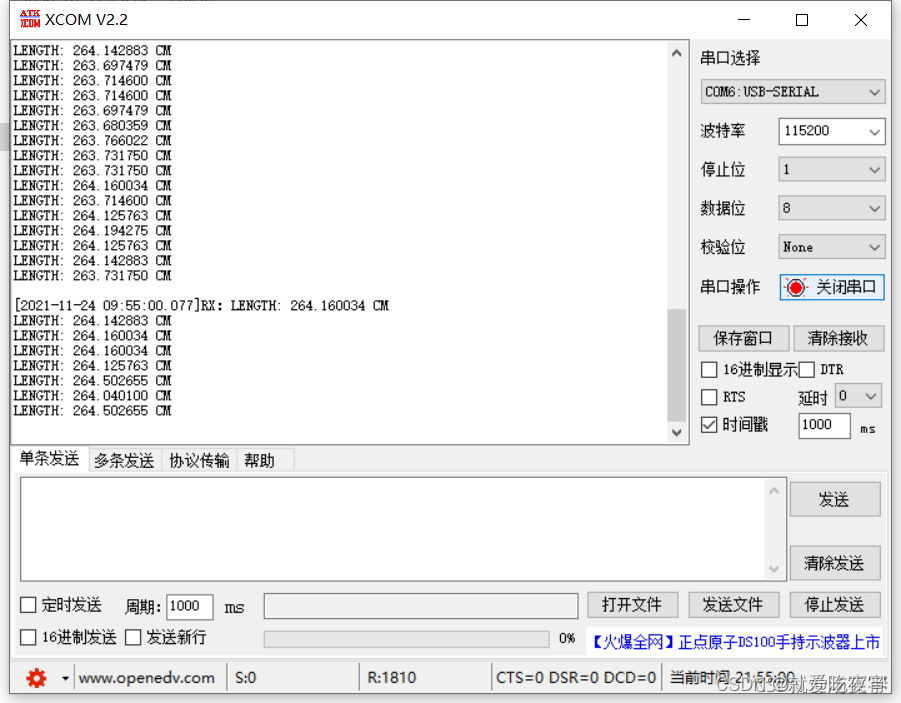
效果展示