导航定位会跳变问题解决
分析引起的原因:
1.场景特征不够
解决: 场景中增加特征,或者是改定位方式.
2.计算机可能性能不够,在偶偶那么卡顿一刹那可能会导致定位数据不准确.
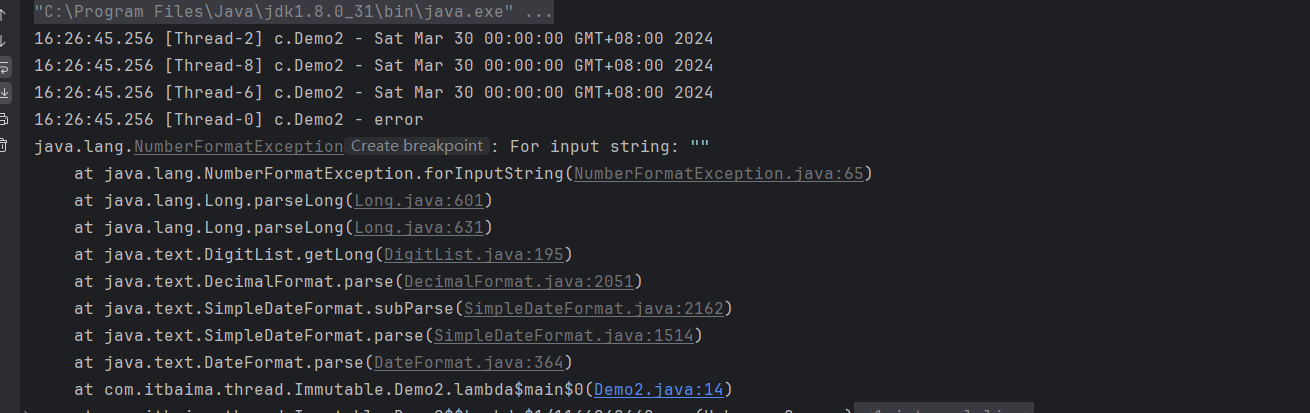
3..里程计数据或者imu数据异常问题
写一个代码监听里程计数据的功能,里程计数据上侦数据与下一侦数据存在较大偏差的就记录下来.包括记录imu数据,重定位数据,当前跳变的定位数据.包括通过rosbag录制数据以方便定位问题出处.
(我公司的里程计数据是在下位机计算的,所以现优先排除下位机发上来的里程数据是否准确)
代码:
录制rosbag:
rosbag_record_test.launch
<launch>
<node pkg="rosbag" type="record" name="bag_record" args="/map /scan /imu/data /tf /odom /raw_odom /tf_static -o /home/sukai/slam/rosBag/makeAmclTest.bag"/>
</launch>
记录里程计等数据:
odometry_checker_log.launch
<launch>
<node name="odometry_checker_node" pkg="steeringwheel" type="odometry_checker_node" output="screen">
<!-- 里程计阀值-->
&l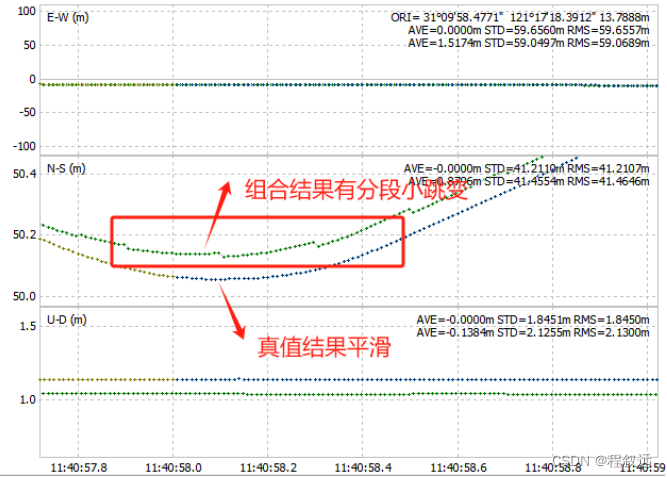

























![[图像处理] MFC载入图片并进行二值化处理和灰度处理及其效果显示](https://img-blog.csdnimg.cn/direct/848fc5663e8f407080f749ff65c99a72.png)