1. 显示--VIZ
曾经基于PCL 做过不少点云相关的开发,采样VTK进行有点云显示。后来基于OpenCV做了不少三维重建工作,总是将点云保存下来,然后借助CloudCompare等查看结果。如果能够将VIZ编译进来,预计会提升开发速度。
在Ubuntu下,VIZ的安装较为简单(珍爱生命,学习就用不要用Windows了)。在编译好OpenCV + Contrib之后(网上很多教程,这里不再赘述)。在build的目录内打开终端,输入下列命令行即可。
//安装VTK
sudo apt-get install libvtk6-dev
//打开vtk,生成及安装
cmake -DWITH_VTK=ON ..
make
sudo make install
//加载配置
ldconfig
测试VIZ,输入如下代码,测试、运行。
#include <opencv2/viz.hpp>
#include <opencv2/calib3d.hpp>
#include <iostream>
using namespace cv;
using namespace std;
static void help()
{
cout
<< "--------------------------------------------------------------------------" << endl
<< "This program shows how to visualize a cube rotated around (1,1,1) and shifted "
<< "using Rodrigues vector." << endl
<< "Usage:" << endl
<< "./widget_pose" << endl
<< endl;
}
int main()
{
help();
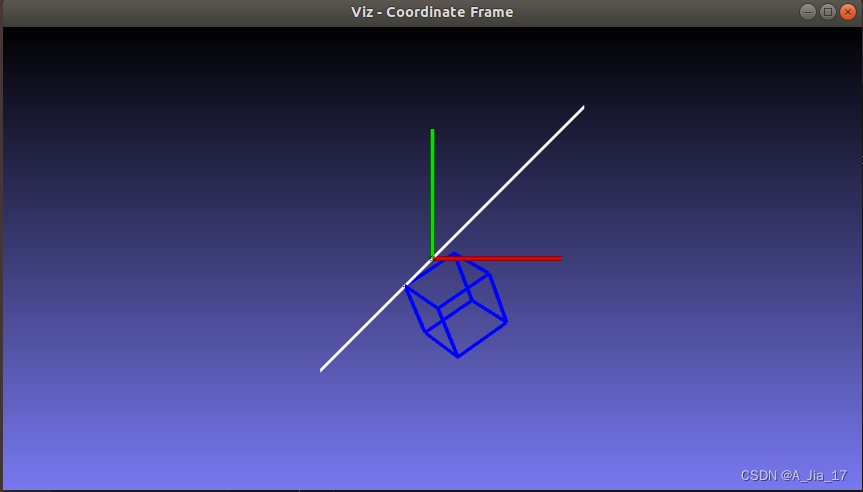
viz::Viz3d myWindow("Coordinate Frame");
myWindow.showWidget("Coordinate Widget", viz::WCoordinateSystem());
viz::WLine axis(Point3f(-1.0f,-1.0f,-1.0f), Point3f(1.0f,1.0f,1.0f));
axis.setRenderingProperty(viz::LINE_WIDTH, 4.0);
myWindow.showWidget("Line Widget", axis);
viz::WCube cube_widget(Point3f(0.5,0.5,0.0), Point3f(0.0,0.0,-0.5), true, viz::Color::blue());
cube_widget.setRenderingProperty(viz::LINE_WIDTH, 4.0);
myWindow.showWidget("Cube Widget", cube_widget);
Mat rot_vec = Mat::zeros(1,3,CV_32F);
float translation_phase = 0.0, translation = 0.0;
rot_vec.at<float>(0, 0) += (float)CV_PI * 0.01f;
rot_vec.at<float>(0, 1) += (float)CV_PI * 0.01f;
rot_vec.at<float>(0, 2) += (float)CV_PI * 0.01f;
translation_phase += (float)CV_PI * 0.01f;
translation = sin(translation_phase);
Mat rot_mat;
Rodrigues(rot_vec, rot_mat);
cout << "rot_mat = " << rot_mat << endl;
Affine3f pose(rot_mat, Vec3f(translation, translation, translation));
Affine3f pose2(pose.matrix);
cout << "pose = " << pose.matrix << endl;
cout << "pose = " << pose2.matrix << endl;
while(!myWindow.wasStopped())
{
/* Rotation using rodrigues */
rot_vec.at<float>(0,0) += (float)CV_PI * 0.01f;
rot_vec.at<float>(0,1) += (float)CV_PI * 0.01f;
rot_vec.at<float>(0,2) += (float)CV_PI * 0.01f;
translation_phase += (float)CV_PI * 0.01f;
translation = sin(translation_phase);
Mat rot_mat1;
Rodrigues(rot_vec, rot_mat1);
Affine3f pose1(rot_mat1, Vec3f(translation, translation, translation));
myWindow.setWidgetPose("Cube Widget", pose1);
myWindow.spinOnce(1, true);
}
return 0;
}运行上述代码之后,一个运动的正方体框会被展示出来。