基于STM32的寻迹小车设计详细论文
摘要:
本文详细介绍了基于STM32微控制器的寻迹小车的设计过程。从硬件选型、电路设计、软件编程、系统调试到实验结果分析,全面阐述了寻迹小车的实现方法。该设计通过红外传感器识别黑色路径,实现了小车的自主循迹功能。实验结果表明,该寻迹小车具有良好的稳定性和寻迹精度,为智能小车的研究和应用提供了有益的参考。
一、引言
随着智能科技的飞速发展,智能小车作为智能机器人的重要组成部分,已广泛应用于工业自动化、无人驾驶、智能仓储等领域。寻迹小车是一种能够根据预设路径自动行驶的智能小车,其核心在于路径识别和跟踪技术。本文旨在设计并实现一种基于STM32微控制器的寻迹小车,通过红外传感器识别路径,实现小车的自主导航和路径跟踪。
二、硬件设计
2.1 硬件选型
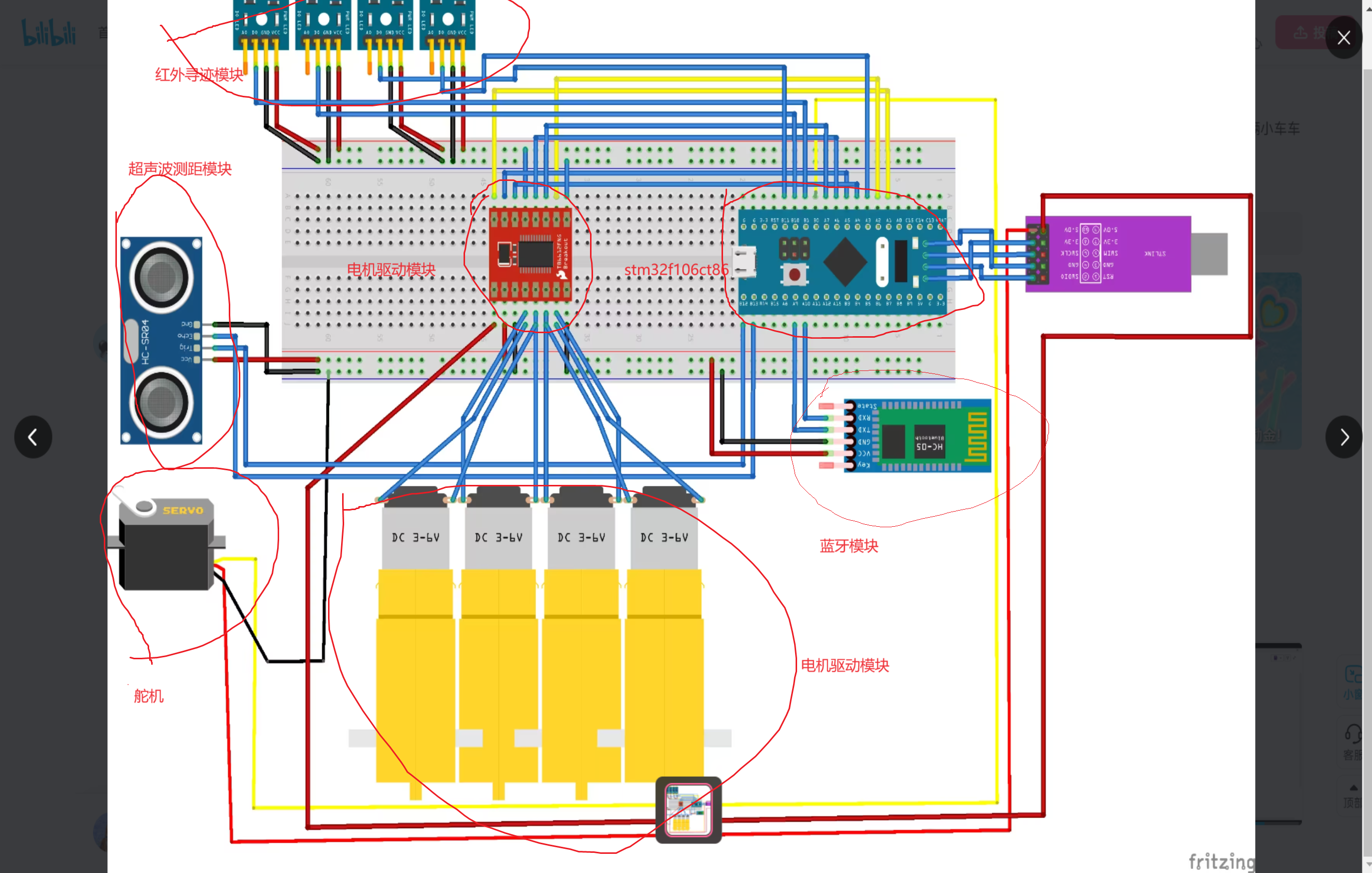
本设计选用STM32F103C8T6作为主控制器,该芯片具有高性能、低功耗、丰富的外设接口等优点。红外传感器选用数字式红外寻迹模块,能够稳定地检测黑色路径。电机驱动模块选用L298N电机驱动板,能够驱动直流电机正反转及调速。电源模块选用锂电池供电,为小车提供稳定的电源供应。
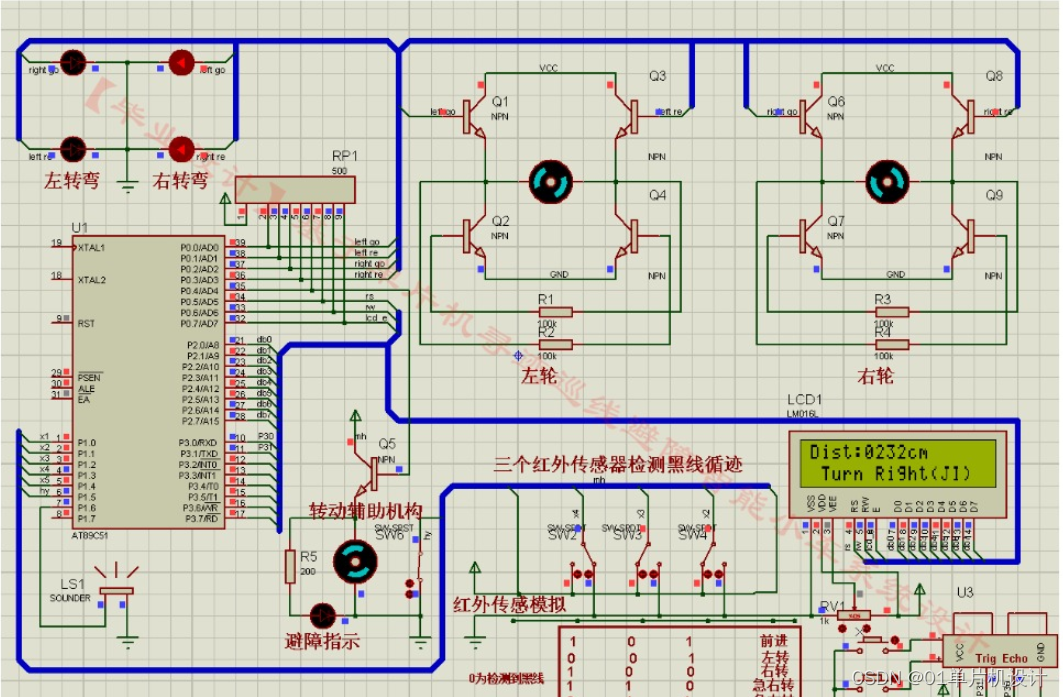
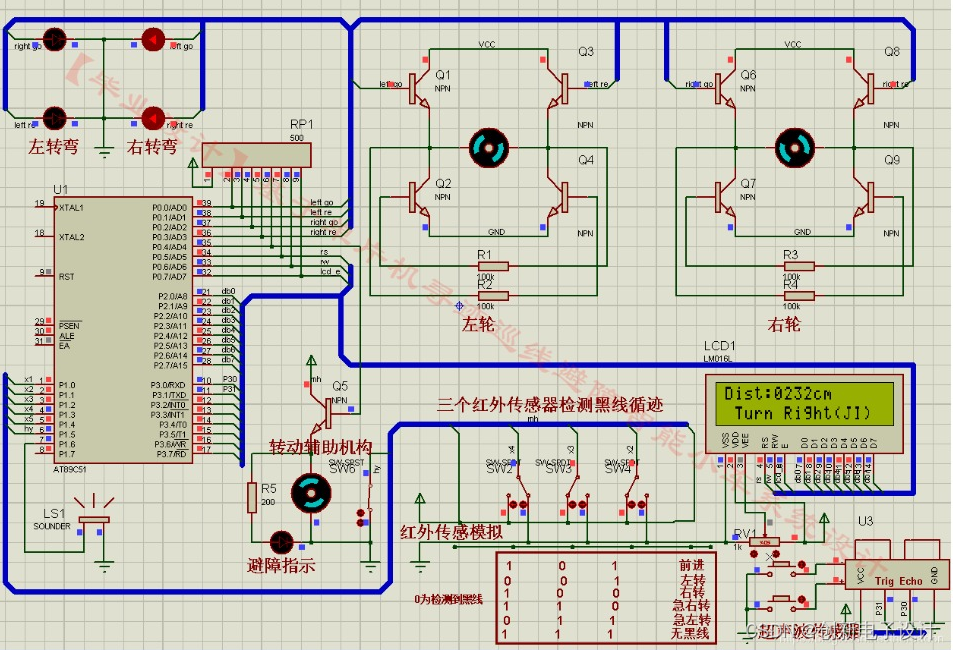
2.2 电路设计
电路设计包括电源电路、电机驱动电路、红外传感器电路等。电源电路为小车提供稳定的电压和电流;电机驱动电路连接电机和主控制器,根据控制信号驱动电机转动;红外传感器电路连接红外寻迹模块和主控制器,将检测到的路径信息传输给主控制器处理。
三、软件设计
软件设计包括主控制器程序编写、红外传感器数据采集与处理、电机驱动控制等。主控制器程序采用C语言编写,实现了系统初始化、传感器数据采集与处理、电机驱动控制等功能。红外传感器数据采集与处理程序通过读取红外寻迹模块的数字信号,判断小车的当前位置和行驶方向。电机驱动控制程序根据红外传感器的数据输出相应的控制指令给电机驱动模块,驱动小车执行相应的动作。
四、系统调试与实验结果
在系统调试阶段,我们对硬件电路进行了检查与测试,确保各模块能够正常工作。然后对软件程序进行了调试与优化,提高了小车的寻迹精度和稳定性。在实验结果方面,我们设置了不同的路径进行测试,包括直线、曲线、交叉口等。实验结果表明,该寻迹小车能够准确地识别路径并执行相应的动作,具有良好的稳定性和寻迹精度。
五、结论与展望
本文成功设计并实现了一种基于STM32微控制器的寻迹小车。通过红外传感器识别黑色路径,实现了小车的自主循迹功能。实验结果表明,该设计具有良好的稳定性和寻迹精度,为智能小车的研究和应用提供了有益的参考。未来工作中,我们将进一步优化小车的性能和提高其智能化水平,探索更多的应用场景和功能拓展。例如,可以引入更多的传感器和算法,实现小车的避障、定位、导航等高级功能;也可以将寻迹小车应用于教育、娱乐、物流等领域,发挥其智能化和自动化的优势。
由于完整的基于STM32的寻迹小车设计代码相对较长,并且需要根据具体的硬件设计、传感器型号、电机驱动方式等来定制,这里我可以提供一个大致的代码框架和关键部分的伪代码,以便您根据您的实际硬件和设计需求进行修改和完善。
代码框架
通常,STM32的程序会使用HAL库或标准外设库,配合STM32CubeMX等工具进行配置和初始化。以下是一个简化的代码框架,包含主函数和一些基本功能模块的伪代码。
#include "stm32f1xx_hal.h" // 根据实际使用的STM32型号选择合适的头文件
#include "motor_control.h" // 电机控制相关函数
#include "sensor_read.h" // 传感器读取相关函数
// 全局变量定义,例如传感器读取值、电机控制标志等
// ...
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟,此函数需要根据具体的硬件情况进行实现
MX_GPIO_Init(); // 初始化GPIO,用于控制传感器和电机等
MX_USART_UART_Init(); // 初始化串口,用于调试信息等输出(可选)
// 传感器和电机控制的初始化(需要根据实际使用的模块进行实现)
Init_Sensors();
Init_Motors();
while (1)
{
// 读取传感器数据(实现细节在sensor_read.c/.h中)
Read_Sensors();
// 根据传感器数据调整电机控制(实现细节在motor_control.c/.h中)
Control_Motors();
// 可能的延时或任务调度(根据具体情况添加)
HAL_Delay(10); // 简单的延时,用于控制循环速率
}
}关键部分伪代码
传感器初始化 (Init_Sensors)
void Init_Sensors(void) { // 配置传感器相关的GPIO引脚为输入模式等(具体代码依赖于传感器接口) // ... 配置代码 ... // 如果传感器需要额外的初始化序列,则在这里发送 // ... 初始化代码 ... }读取传感器数据 (Read_Sensors)
void Read_Sensors(void) { // 读取每个传感器的状态(通常是数字信号,高低电平表示检测到/未检测到黑线) // sensor_left, sensor_right 等为假设的传感器读取函数或宏定义 uint8_t left_sensor_state = Read_Sensor_Left(); // 左侧传感器状态读取函数 uint8_t right_sensor_state = Read_Sensor_Right(); // 右侧传感器状态读取函数 // 处理读取到的传感器数据(比如更新全局变量,进行简单的逻辑判断等) // ... 处理代码 ... }电机控制初始化 (Init_Motors)
void Init_Motors(void) { // 配置电机控制相关的GPIO引脚为输出模式(PWM或简单的高低电平控制)等 // ... 配置代码 ... // 如果电机驱动器需要额外的初始化序列,则在这里发送 // ... 初始化代码 ... }控制电机 (Control_Motors)
void Control_Motors(void) { // 根据传感器数据来决定如何控制电机(前进、后退、左转、右转、停止等) // 这里假设有Set_Motor_Speed等函数来设置电机的速度或方向等参数(具体实现依赖于电机驱动器) if (/* 条件:需要前进 */) { Set_Motor_Speed(MOTOR_LEFT, FORWARD, SOME_SPEED); // 左侧电机以某个速度前进 Set_Motor_Speed(MOTOR_RIGHT, FORWARD, SOME_SPEED); // 右侧电机以某个速度前进 } else if (/* 条件:需要左转 */) { // ... 左转控制代码 ... 例如减慢一侧电机的速度或停止转动一侧电机等来实现转弯效果 ... } // ... 其他条件的处理 ... 包括右转、后退、停止等 ... }注意事项:
- 这里的代码只是一个框架和伪代码的集合,用于指导如何开始编写您的寻迹小车程序。实际的实现将需要更详细的代码来与您的硬件进行交互。
- 传感器的具体型号和接口方式将决定如何读取它们的数据。例如,有些红外寻迹模块输出数字信号(高低电平),有些可能输出模拟信号需要ADC转换。
- 电机控制的具体方式也将依赖于您选择的电机驱动器。常见的控制方式包括PWM调速和简单的电平控制(正反转)。如果您的电机驱动器支持更复杂的通信协议(如I2C、SPI等),则需要编写相应的通信代码。
- 请确保在实际编程时参考您的硬件数据手册和开发环境的具体文档来编写正确的初始化和控制代码。
当然,我们可以进一步扩展伪代码,使其更接近一个实际的寻迹小车项目。请注意,以下代码仍然是基于STM32 HAL库的伪代码,并且需要根据您具体的硬件配置和传感器型号进行调整。
首先,我们需要定义一些用于传感器和电机控制的常量、变量和函数原型。这些通常会在单独的头文件中定义,但为了简化,我们在这里直接给出。
sensor_read.h (传感器读取相关头文件)
#ifndef SENSOR_READ_H #define SENSOR_READ_H #include "stm32f1xx_hal.h" // 假设我们有5个红外传感器,分别定义为LEFT_1, LEFT_2, MIDDLE, RIGHT_2, RIGHT_1 #define SENSOR_LEFT_1 GPIO_PIN_0 // 假设连接到GPIOA的第0脚 #define SENSOR_LEFT_2 GPIO_PIN_1 // 假设连接到GPIOA的第1脚 #define SENSOR_MIDDLE GPIO_PIN_2 // 假设连接到GPIOA的第2脚 #define SENSOR_RIGHT_2 GPIO_PIN_3 // 假设连接到GPIOA的第3脚 #define SENSOR_RIGHT_1 GPIO_PIN_4 // 假设连接到GPIOA的第4脚 #define SENSOR_PORT GPIOA #define SENSOR_GPIO_TYPE GPIO_NOPULL #define SENSOR_MODE GPIO_MODE_INPUT #define SENSOR_SPEED GPIO_SPEED_FREQ_LOW // 初始化传感器GPIO void Init_Sensors_GPIO(void); // 读取单个传感器的状态 uint8_t Read_Single_Sensor(uint16_t pin); // 读取所有传感器的状态 void Read_All_Sensors(uint8_t *sensor_values); #endif // SENSOR_READ_Hsensor_read.c (传感器读取相关源文件)
#include "sensor_read.h" void Init_Sensors_GPIO(void) { GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA时钟(根据具体连接的端口修改) // 配置传感器引脚为输入模式 GPIO_InitStruct.Pin = SENSOR_LEFT_1 | SENSOR_LEFT_2 | SENSOR_MIDDLE | SENSOR_RIGHT_2 | SENSOR_RIGHT_1; GPIO_InitStruct.Mode = SENSOR_MODE; GPIO_InitStruct.Pull = SENSOR_GPIO_TYPE; GPIO_InitStruct.Speed = SENSOR_SPEED; HAL_GPIO_Init(SENSOR_PORT, &GPIO_InitStruct); } uint8_t Read_Single_Sensor(uint16_t pin) { return HAL_GPIO_ReadPin(SENSOR_PORT, pin); // 读取引脚状态,返回0或1 } void Read_All_Sensors(uint8_t *sensor_values) { sensor_values[0] = Read_Single_Sensor(SENSOR_LEFT_1); sensor_values[1] = Read_Single_Sensor(SENSOR_LEFT_2); sensor_values[2] = Read_Single_Sensor(SENSOR_MIDDLE); sensor_values[3] = Read_Single_Sensor(SENSOR_RIGHT_2); sensor_values[4] = Read_Single_Sensor(SENSOR_RIGHT_1); }motor_control.h (电机控制相关头文件)
#ifndef MOTOR_CONTROL_H #define MOTOR_CONTROL_H #include "stm32f1xx_hal.h" // 定义电机控制相关的宏和常量(这些值取决于您的电机驱动板和PWM定时器设置) #define MOTOR_LEFT_PWM_CHANNEL TIM_CHANNEL_1 // 假设左侧电机连接到TIMx的第1通道 #define MOTOR_RIGHT_PWM_CHANNEL TIM_CHANNEL_2 // 假设右侧电机连接到TIMx的第2通道 #define MOTOR_PWM_TIMER TIM3 // 假设使用TIM3作为PWM定时器 #define MOTOR_PWM_HTIM htim3 // HAL库中对应的TIM_HandleTypeDef结构体实例名称 // 初始化电机控制PWM void Init_Motors_PWM(void); // 设置电机速度(范围和具体值取决于PWM定时器的配置) void Set_Motor_Speed(uint8_t motor, int speed); // 根据传感器值调整电机速度以实现寻迹功能(这里只是一个简单的示例实现) void Control_Motors_Based_On_Sensors(uint8_t *sensor_values); #endif // MOTOR_CONTROL_Hmotor_control.c (电机控制相关源文件)
#include "motor_control.h" // PWM初始化配置(需要根据具体的定时器和通道修改) void Init_Motors_PWM(void) { TIM_OC_InitTypeDef sConfigOC = {0}; TIM_MasterConfigTypeDef sMasterConfig = {0}; // 配置PWM定时器(省略时钟使能和基本定时器配置代码)... // 这里需要配置定时器的周期、预分频值等以产生适当的PWM频率和分辨率。 // ... // 配置PWM通道(模式和输出比较等)... sConfigOC.OCMode = TIM_OCMODE_PWM1; // 选择PWM模式1作为输出比较模式 sConfigOC.Pulse = 0; // 设置初始PWM脉冲值为0(停止状态) sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; // 设置输出比较极性为高 // ... 其他必要的配置 ... // 应用PWM配置到左侧电机通道... HAL_TIM_PWM_ConfigChannel(&MOTOR_PWM_HTIM, &sConfigOC, MOTOR_LEFT_PWM_CHANNEL); // 应用PWM配置到右侧电机通道... HAL_TIM_PWM_ConfigChannel(&MOTOR_PWM_HTIM, &sConfigOC, MOTOR_RIGHT_PWM_CHANNEL); // 启动PWM输出... HAL_TIM_PWM_Start(&MOTOR_PWM_HTIM, MOTOR_LEFT_PWM_CHANNEL); HAL_TIM_PWM_Start(&MOTOR_PWM_HTIM, MOTOR_RIGHT_PWM_CHANNEL); } // 设置电机速度的函数(简单示例,速度和方向控制可能需要更复杂的逻辑) void Set_Motor_Speed(uint8_t motor, int speed) { // 检查速度和电机参数的有效性... if (speed < 0) speed = 0; // 确保速度不会小于0 if (speed > 100) speed = 100; // 假设PWM最大值为100(取决于定时器配置) // 根据电机参数选择PWM通道... TIM_Channel_TypeDef channel = (motor == MOTOR_LEFT) ? MOTOR_LEFT_PWM_CHANNEL : MOTOR_RIGHT_PWM_CHANNEL; // 设置PWM脉冲值以改变电机速度... __HAL_TIM_SET_COMPARE(&MOTOR_PWM_HTIM, channel, speed); } // 根据传感器值调整电机速度的函数(寻迹算法的核心部分) void Control_Motors_Based_On_Sensors(uint8_t *sensor_values) { // 这里实现一个简单的寻迹算法示例... // 根据传感器数组中的值来决定如何调整电机的速度... // 逻辑可能包括:如果检测到黑线则直行,如果偏离黑线则转弯等。 // ... // 实际项目中,您可能需要一个更复杂的算法来处理各种可能的路径和转弯情况。 }main.c (主函数文件) 包含以上头文件的引用和实现调用
#include "stm32f1xx_hal.h" #include "sensor_read.h" #include "motor_control.h" int main(void) { HAL_Init(); // 初始化HAL库和时钟系统(可能需要配置系统时钟源等)... // ... 其他必要的初始化代码(如串口初始化用于调试等)... Init_Sensors_GPIO(); // 初始化传感器GPIO为输入模式 Init_Motors_PWM(); // 初始化电机PWM控制 uint8_t sensor_values[5] = {0}; // 存储传感器读数的数组 while (1) { Read_All_Sensors(sensor_values); // 读取所有传感器的状态 Control_Motors_Based_On_Sensors(sensor_values); // 根据传感器状态控制电机动作 // 可能需要添加延时或任务调度逻辑以控制循环速率... HAL_Delay(10); // 简单的延时示例(需要根据实际需求调整) } }请注意,以上代码仍然是一个框架性质的示例,并且省略了很多关键细节(如时钟配置、PWM定时器的完整配置、电机控制的完整逻辑等)。在实际项目中,您需要仔细配置时钟系统、PWM定时器和电机控制逻辑,并确保传感器读数的准确性和电机控制的响应性。此外,寻迹算法的实现将高度依赖于您的具体需求和路径的复杂性。