系列型号
JL15-1.5/11电流继电器JL15-2.5/11电流继电器
JL15-5/11电流继电器JL15-10/11电流继电器
JL15-15/11电流继电器JL15-20/11电流继电器
JL15-30/11电流继电器JL15-40/11电流继电器
JL15-60/11电流继电器JL15-80/11电流继电器
JL15-100/11电流继电器JL15-150/11电流继电器
JL15-250/11电流继电器JL15-300/11电流继电器
JL15-400/11电流继电器JL15-600/11电流继电器
JL15-800/11电流继电器JL15-1200/11电流继电器
概述
JL-15电流继电器 是一种过电流瞬时动作的电磁式继电器,用于交流50Hz,380V及以下或直流440V及以下,电流1200A及以下的一次回路中,作为电力传动系统中的过电流保护元件。本系列JL15-F型交流高返回系数继电器主要用于每秒操作的交流异步电动机的者转保护。
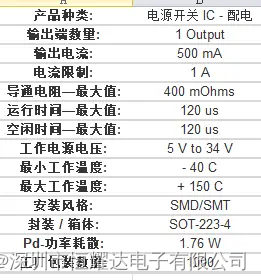
技术参数
开孔尺寸
安装尺寸
订货须知
1 继电器的型号及名称。
2 大整定值(电流或电压)。
3 继电器数量。
电磁型电流继电器动作条件
电磁吸力产生的电磁转矩与磁通的平方成正比;
正常情况下,线圈中流入负荷电流,为保证继电器不动作,可动舌片受弹簧7反作用力的控制而保持在原始位置,此时弹簧产生的力矩称为初拉力矩。由于弹簧的张力与其伸长成正比,则舌片向左移动,弹簧产生反抗力矩=初拉力矩+空隙变化的比例;
舌片转动过程中,必须克服由磨擦力所产生的磨擦转矩,可认为是常数,所以阻碍继电器动作的全部机械反抗转矩就是:磨擦转矩 + 反抗力矩;
动作条件:
为使继电器动作并闭合其触点,就必须增大电流,以增大电磁转矩,动作条件是:电磁转矩 ≥ 磨擦转矩 + 反抗力矩,满足上述条件使继电器动作的最小电流称为继电器的动作电流;
返回原位:
继电器动作后要返回原位置,必须减小电流以减小电磁转矩,然后由弹簧反作用力把舌片拉回来,继电器返回条件:电磁转矩 ≤ 反抗力矩 + 磨擦转矩。
电磁型电流继电器的动作电流与哪些因素有关
静铁芯与动铁芯之间的吸引力,取决于线圈匝数与电流之积。
静铁芯与动铁芯之间的距离。
动铁芯的返回力(弹簧的弹力,重力)
电磁型电流继电器动作电流的调整方法
改变反作用弹簧力矩。即改变调整杆的位置,当调整杆向反时针方向旋转时,弹簧反作用力矩增大,I动增大;反之,I动减小,此法可连续调整继电器的动作电流,在刻度盘上可直接读出整定值。
电流继电器两个线圈的连接方法(串联或并联),线圈并联时的动作电流为串联时动作电流的两倍。
上海约瑟继电器事业部