Gazebo版本:
gazebo_ros: 这个包提供了与传统的Gazebo仿真器的接口。它通常指的是ROS社区广泛使用的版本,比如Gazebo 7、9或11等。这个版本的Gazebo已经存在很长时间了,并且与ROS具有良好的集成。ros_ign_gazebo: 这个包提供了与Ignition Gazebo的接口,Ignition Gazebo是Gazebo仿真器的下一代版本,它提供了更先进的特性、更现代化的架构和更强大的仿真能力。ros_ign_gazebo是为了在ROS中使用这一新版本的Gazebo而开发的。
特性和能力:
- 传统Gazebo提供了一个成熟的仿真环境,拥有大量的插件和已经建立的用户社区。它适用于多种类型的仿真,尤其是那些需要与ROS紧密集成的项目。
- Ignition Gazebo在某些方面比传统的Gazebo更先进,例如在物理引擎、传感器模型和图形渲染上。它旨在提供更细粒度的控制,以及更适合大型复杂仿真场景的特性。
支持的ROS版本:
gazebo_ros包主要用于与ROS 1集成,尽管也存在用于ROS 2的相应工具和插件。ros_ign_gazebo则是专门为ROS 2设计的,它利用了ROS 2的一些改进,如改进的通信模型,以提供更好的性能和可靠性。
安装和使用:
gazebo_ros通常与ROS 1一起安装,作为ROS桌面完整版的一部分,因此它非常容易开始使用。ros_ign_gazebo需要单独安装,并且需要用户熟悉Ignition Gazebo和ROS 2。
文档和资源:
- 传统的Gazebo有着丰富的教程、文档和社区支持。因此如果你是一个新手或者需要大量的参考资料,
gazebo_ros可能是更好的起点。 - Ignition Gazebo虽然文档正在快速增长,但它还比较新,所以相比传统Gazebo,可能没有那么多的教程和用户经验。
- 传统的Gazebo有着丰富的教程、文档和社区支持。因此如果你是一个新手或者需要大量的参考资料,
插件和工具:
gazebo_ros的生态系统中有大量的ROS插件和工具,这些可以简化仿真中机器人的集成和交互。ros_ign_gazebo有自己的插件系统,但由于Ignition Gazebo的插件生态还在成长中,所以可用的插件数量可能没有那么多。
社区和更新:
- 由于
ros_ign_gazebo是更现代的集成努力,所以它的发展速度可能更快,且更频繁地更新以添加新功能或改进现有功能。 gazebo_ros的更新和维护可能不那么频繁,但它依赖于一个稳定和广泛测试的代码库,这对于需要稳定环境的项目来说可能更有吸引力。
- 由于
性能和可扩展性:
- Ignition Gazebo设计之初就考虑了性能和可扩展性,使其在处理大型复杂环境时表现更佳。
- 传统Gazebo可能在大规模仿真场景中遇到性能瓶颈,尽管它对于许多应用来说已经足够好。
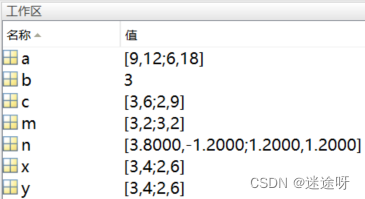
MATLAB中./和/,.*和*,.^和^的区别
2024-03-17 03:06:02 77 阅读