分辨率:通过视野大小和精度需求来确定 相机分辨率
eg:视野(工件10mm8mm允许2mm的浮动):12mm10mm,检测精度需求为0.01mm则理论需求的相机分辨率为:12mm/0.01mm=1200以及10mm/0.01mm=1000此时选择一个分辨率略大于1200*1000的相机就能满足检测需求。
黑白彩色:一般不需要检测图像颜色信息的都用黑白相机
曝光时间:若是飞拍则需一定的最小曝光时间 原则是:最小曝光时间内物体或者相机移动的距离≤1个像素就行。
帧率: 满足飞拍时连续拍照的时间间隔
数据接口:GigE cameLink USB
芯片尺寸:几分之一英寸
镜头接口:C和CS
快门方式:一般来说运动物体用全局快门,静止物体用卷帘快门
Cognex Cam-CIC-5000R-14-G:500w 卷帘快门 14帧/秒 黑白相机
接口GigE 分辨率2592*1944 像素位深12bits 靶面尺寸:2.5分之一英寸
感光芯片:COMS 芯片尺寸:5.7mm*4.28mm
相机选型总结:
精度满足要求: 一般实际精度要高于项目所需求的精度eg:需求为0.02mm 我们可以给0.01mm甚至0.005mm的精度
确定色彩要求:
曝光时间:
帧率/数据接口:
芯片尺寸:
镜头接口:
其他相关
PS:常见芯片尺寸: ¼英寸为3.6mm x 2.7mm 对角线4mm
⅓英寸为4.8mm x 3.6mm 对角线6mm ½英寸为6.4mm x 4.8mm 对角线8mm
⅔英寸为8.8mm x 6.6mm 对角线11mm 1英寸为12.8mm x 9.6mm 对角线16mm
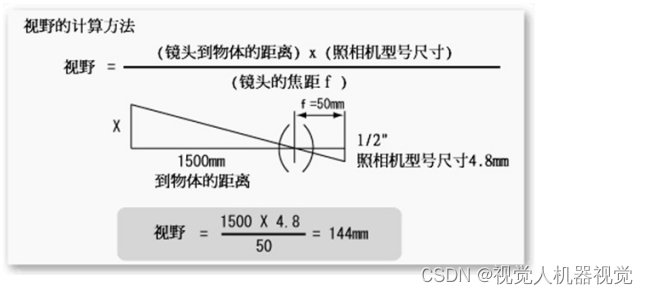
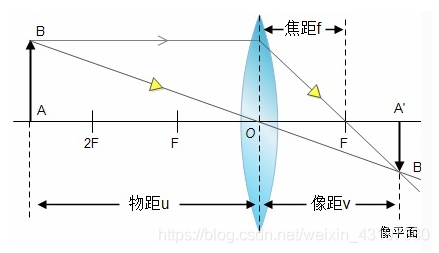
物距芯片尺寸=视野焦距






















![[论文精读]Dynamic Coarse-to-Fine Learning for Oriented Tiny Object Detection](https://img-blog.csdnimg.cn/direct/84be855d8fee435d834abf7d45d81a7c.png)