思路
在q-learning当中,Q函数的输入是状态state和action,输出是q-value。
而DQN就是使用神经网络来拟合Q函数,所以从直观上来说,我觉得神经网络的输入应该是状态state和action,输出应该是q-value。
但是,网上绝大多数DQN的代码实现都把state作为网络输入,把所有action的q-value的组合作为网络输出。我觉得这是不直观的、令人费解的,于是我按照自己的想法写了一份DQN代码。
在下面的代码中,神经网络的输入是state和action的连接,若干个浮点数表示state,一个整数表示action。神经网络的输出只有一个元素,代表q-value的值。
代码
env.py
import gym
from DQN_brain import DQN
import matplotlib.pyplot as plt
import numpy
lr = 1e-3 # 学习率
gamma = 0.9 # 折扣因子
epsilon = 0.9 # 贪心系数
n_hidden = 50 # 隐含层神经元个数
env = gym.make("CartPole-v1")
n_states = env.observation_space.shape[0] # 4
n_actions = env.action_space.n # 2 动作的个数
dqn = DQN(n_states, n_hidden, n_actions, lr, gamma, epsilon)
if __name__ == '__main__':
reward_list = []
for i in range(100):
# 获取初始环境
state = env.reset()[0] # len=4
total_reward = 0
done = False
while True:
# 获取最优动作
action = dqn.optimal_action(state)
# 有一定概率不采取最优动作,而是随机选择一个动作执行,这一点很重要
if numpy.random.random() > epsilon:
action = numpy.random.randint(n_actions)
# 更新环境
next_state, reward, done, _, _ = env.step(action)
dqn.learning(state, next_state, action, reward, done)
# 更新一些变量
state = next_state
total_reward += reward
if done:
break
print("第%d回合,total_reward=%f" % (i, total_reward))
reward_list.append(total_reward)
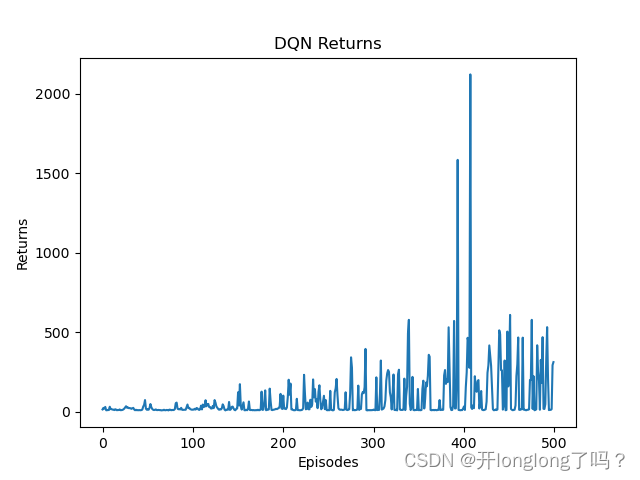
# 绘图
episodes_list = list(range(len(reward_list)))
plt.plot(episodes_list, reward_list)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('DQN Returns')
plt.show()
DQN_brain.py
import torch
from torch import nn, Tensor
class Net(nn.Module):
# 构造有2个隐含层的网络
def __init__(self, input_dim: int, n_hidden: int, output_dim: int):
super().__init__()
self.network = nn.Sequential(
torch.nn.Linear(input_dim, n_hidden, dtype=torch.float),
torch.nn.ReLU(),
torch.nn.Linear(n_hidden, n_hidden, dtype=torch.float),
torch.nn.ReLU(),
torch.nn.Linear(n_hidden, n_hidden, dtype=torch.float),
torch.nn.ReLU(),
torch.nn.Linear(n_hidden, output_dim, dtype=torch.float),
)
# 前传,直接调用Net对象,其实就是调用forward函数
def forward(self, x): # [b,n_states]
return self.network(x)
class DQN:
def __init__(self, n_states: int, n_hidden: int, n_actions: int, lr: float, gamma: float, epsilon: float):
# 属性分配
self.n_states = n_states # 状态的特征数
self.n_hidden = n_hidden # 隐含层个数
self.n_actions = n_actions # 动作数
self.lr = lr # 训练时的学习率
self.gamma = gamma # 折扣因子,对下一状态的回报的缩放
self.epsilon = epsilon # 贪婪策略,有1-epsilon的概率探索
# 实例化训练网络,网络的输入是state+action,
# 网络的输出是只有一个元素的一维向量,代表该动作在该状态下的q-value
self.q_net = Net(self.n_states + 1, self.n_hidden, 1)
# 优化器,更新训练网络的参数
self.q_optimizer = torch.optim.Adam(self.q_net.parameters(), lr=lr)
self.criterion = torch.nn.MSELoss() # 损失函数
# 把状态和动作转化为tensor并连接起来
def _concat_input(self, state: list[float], action: int):
state_tensor = torch.tensor(state, dtype=torch.float)
action_tensor = torch.tensor([action], dtype=torch.float)
return torch.concat([state_tensor, action_tensor])
# 获取q-value值最大的action
def optimal_action(self, state: list[float]):
q_values = torch.tensor([], dtype=torch.float)
# 获取所有action的q-value
for action in range(self.n_actions):
q_values = torch.concat([q_values, self.get_q_value(state, action)])
# 返回值最大的那个下标,item()函数只能对只有单个元素的tensor使用
return torch.argmax(q_values).item()
# 更新网络
def learning(
self,
state: list[float],
next_state: list[float],
action: int,
reward: float,
done: bool
) -> None:
# 下一状态的最优动作
next_optimal_action = self.optimal_action(next_state)
# 当前状态q_value
q_value = self.get_q_value(state, action)
# 下一状态q_value
next_q_value = self.get_q_value(next_state, next_optimal_action)
# q_target计算
q_target = reward + self.gamma * next_q_value * (1. - float(done))
# 计算loss,然后反向传播,然后梯度下降
loss: Tensor = self.criterion(q_value, q_target)
self.q_optimizer.zero_grad()
loss.backward()
self.q_optimizer.step()
# 根据状态和动作获取q_value
def get_q_value(self, state: list[float], action: int) -> Tensor:
return self.q_net(self._concat_input(state, action))
# tensor([5.5241], grad_fn=<ViewBackward0>)





















![Spring boot 请求参数包含[]等特殊字符,导致无法接收问题](https://img-blog.csdnimg.cn/direct/96fedd17fa6e4af2bdb791f93c0bdef5.png)