一、概述
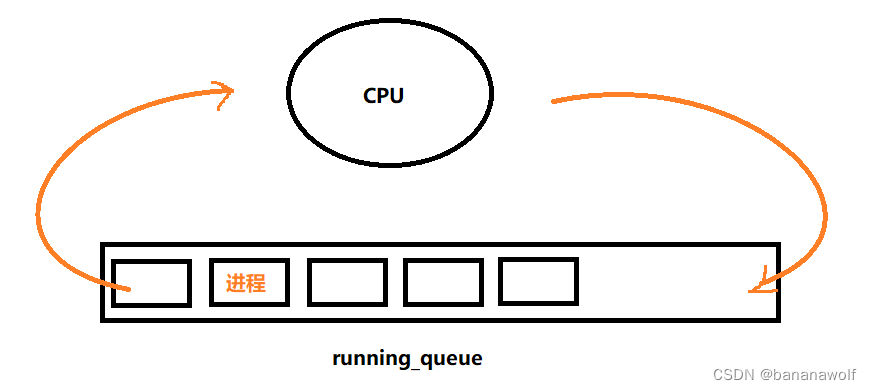
CFS调度器目标是实现各进程完全公平调度。就绪队列维护一颗红黑树,并采用虚拟运行时间来实现时间片的分配。动态计算每个进程的虚拟运行时间,从而实现公平性和高效性。
二、权重与vruntime关系
2.1 权重计算
struct task_struct {
/*
进程执行时,它会根据具体情况改变状态,Linux 中的进程主要有如下状态
TASK_RUNNING 可运行
TASK_INTERRUPTIBLE 可中断的等待状态
TASK_UNINTERRUPTIBLE 不可中断的等待状态
TASK_ZOMBIE 僵死
TASK_STOPPED 暂停
*/
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
int prio; /*动态优先级,根据静态优先级及其他条件计算而来*/
int static_prio; /*普通进程静态优先级,取值范围是100(优先级最高)~139(优先级最低),分别对应nice value的-20 ~ 19。*/
int normal_prio; /*调度器综合考虑各种因素,例如调度策略,nice value、scheduling priority等,把这些factor全部考虑进来,归一化成一个数轴上的number,以此来表示其优先级,这就是normalized priority。对于一个线程,其normalized priority的number越小,其优先级越大。*/
unsigned int rt_priority; /*实时进程优先级*/
unsigned int policy; /*调度策略*/
const struct sched_class *sched_class; /*调度类*/
struct sched_entity se; /*普通进程调度实体*/
struct sched_rt_entity rt; /*实时进程调度实体*/
struct sched_dl_entity dl; /*deadline进程调度实体*/
};
struct load_weight {
unsigned long weight;
u32 inv_weight;
};
struct sched_entity {
/* For load-balancing: */
struct load_weight load;
struct rb_node run_node;
struct list_head group_node;
unsigned int on_rq;
u64 exec_start;
u64 sum_exec_runtime;
u64 vruntime;
u64 prev_sum_exec_runtime;
u64 nr_migrations;
struct sched_statistics statistics;
......
}
// 普通进程nice值与权重转换表,如nice值为0,对应权重为1024
const int sched_prio_to_weight[40] = {
7527 /* -20 */ 88761, 71755, 56483, 46273, 36291,
7528 /* -15 */ 29154, 23254, 18705, 14949, 11916,
7529 /* -10 */ 9548, 7620, 6100, 4904, 3906,
7530 /* -5 */ 3121, 2501, 1991, 1586, 1277,
7531 /* 0 */ 1024, 820, 655, 526, 423,
7532 /* 5 */ 335, 272, 215, 172, 137,
7533 /* 10 */ 110, 87, 70, 56, 45,
7534 /* 15 */ 36, 29, 23, 18, 15,
7535
};进程静态优先级:0~139,其中0~99为实时进程优先级,100~139为普通进程的优先级(对应的nice值为-20~19)
普通进程的权重:参考普通进程nice值与权重转换表,如nice值为0,对应权重为1024。数组的值可以看作是公式:weight = 1024 / 1.25^nice计算得到。公式中的1.25取值依据是:进程每降低一个nice值,将多获得10% cpu的时间。
分配给进程的时间: 总的cpu时间 * 进程的权重/就绪队列(runqueue)所有进程权重之和。
虚拟运行时间:vruntime = delta_exec * nice_0_weight / weight,由于vruntime计算会涉及浮点数计算,为了提高计算效率,采用乘法与移位计算方式,vruntime = (delta_exec * nice_0_weight * multiplier / weight)>> 32 (delta_exec:实际运行时间 multiplier:2的32次幂)。
2.2 vruntime核心代码实现
static u64 __calc_delta(u64 delta_exec, unsigned long weight, struct load_weight *lw)
{
u64 fact = scale_load_down(weight);
u32 fact_hi = (u32)(fact >> 32);
int shift = WMULT_SHIFT;
int fs;
__update_inv_weight(lw);
if (unlikely(fact_hi)) {
fs = fls(fact_hi);
shift -= fs;
fact >>= fs;
}
fact = mul_u32_u32(fact, lw->inv_weight);
fact_hi = (u32)(fact >> 32);
if (fact_hi) {
fs = fls(fact_hi);
shift -= fs;
fact >>= fs;
}
return mul_u64_u32_shr(delta_exec, fact, shift);
}2.3 实际运行时间
static void update_curr(struct cfs_rq *cfs_rq)
{
struct sched_entity *curr = cfs_rq->curr;
u64 now = rq_clock_task(rq_of(cfs_rq));
u64 delta_exec;
if (unlikely(!curr))
return;
// 上一次在cpu上的执行时间
delta_exec = now - curr->exec_start;
if (unlikely((s64)delta_exec <= 0))
return;
curr->exec_start = now;
if (schedstat_enabled()) {
struct sched_statistics *stats;
stats = __schedstats_from_se(curr);
__schedstat_set(stats->exec_max,
max(delta_exec, stats->exec_max));
}
// 总的运行时间
curr->sum_exec_runtime += delta_exec;
schedstat_add(cfs_rq->exec_clock, delta_exec);
// 计算虚拟运行时间
curr->vruntime += calc_delta_fair(delta_exec, curr);
update_deadline(cfs_rq, curr);
// 更新cfs就绪队列中最小的vruntime
update_min_vruntime(cfs_rq);
if (entity_is_task(curr)) {
struct task_struct *curtask = task_of(curr);
trace_sched_stat_runtime(curtask, delta_exec, curr->vruntime);
cgroup_account_cputime(curtask, delta_exec);
account_group_exec_runtime(curtask, delta_exec);
}
account_cfs_rq_runtime(cfs_rq, delta_exec);
}三、进程创建
3.1 计算新进程的vruntime
新创建的进程会被加入调度队列,导致cfs队列权重发生变化,需要一个惩罚值:
static u64 sched_slice(struct cfs_rq *cfs_rq, struct sched_entity *se)
{
unsigned int nr_running = cfs_rq->nr_running;
u64 slice;
if (sched_feat(ALT_PERIOD))
nr_running = rq_of(cfs_rq)->cfs.h_nr_running;
slice = __sched_period(nr_running + !se->on_rq);
for_each_sched_entity(se) {
struct load_weight *load;
struct load_weight lw;
cfs_rq = cfs_rq_of(se);
load = &cfs_rq->load;
if (unlikely(!se->on_rq)) {
lw = cfs_rq->load;
update_load_add(&lw, se->load.weight);
load = &lw;
}
slice = __calc_delta(slice, se->load.weight, load);
}
if (sched_feat(BASE_SLICE))
slice = max(slice, (u64)sysctl_sched_min_granularity);
return slice;
}新创建的进程vruntime = max(调度实体的实际虚拟时间, min_vruntime)。
3.2 加入调度器
执行wake_up_new_task函数加入到调度器中:
void wake_up_new_task(struct task_struct *p)
{
struct rq_flags rf;
struct rq *rq;
trace_android_rvh_wake_up_new_task(p);
raw_spin_lock_irqsave(&p->pi_lock, rf.flags);
p->state = TASK_RUNNING;
#ifdef CONFIG_SMP
/*
* Fork balancing, do it here and not earlier because:
* - cpus_ptr can change in the fork path
* - any previously selected CPU might disappear through hotplug
*
* Use __set_task_cpu() to avoid calling sched_class::migrate_task_rq,
* as we're not fully set-up yet.
*/
p->recent_used_cpu = task_cpu(p);
rseq_migrate(p);
__set_task_cpu(p, select_task_rq(p, task_cpu(p), SD_BALANCE_FORK, 0));
#endif
rq = __task_rq_lock(p, &rf);
update_rq_clock(rq);
post_init_entity_util_avg(p);
trace_android_rvh_new_task_stats(p);
activate_task(rq, p, ENQUEUE_NOCLOCK);
trace_sched_wakeup_new(p);
check_preempt_curr(rq, p, WF_FORK);
#ifdef CONFIG_SMP
if (p->sched_class->task_woken) {
/*
* Nothing relies on rq->lock after this, so its fine to
* drop it.
*/
rq_unpin_lock(rq, &rf);
p->sched_class->task_woken(rq, p);
rq_repin_lock(rq, &rf);
}
#endif
task_rq_unlock(rq, p, &rf);
}3.3 加入到红黑树
加入到就绪队列的红黑树中:
static void __enqueue_entity(struct cfs_rq *cfs_rq, struct sched_entity *se)
{
struct rb_node **link = &cfs_rq->tasks_timeline.rb_root.rb_node;
struct rb_node *parent = NULL;
struct sched_entity *entry;
bool leftmost = true;
trace_android_rvh_enqueue_entity(cfs_rq, se);
/*
* Find the right place in the rbtree:
*/
while (*link) {
parent = *link;
entry = rb_entry(parent, struct sched_entity, run_node);
/*
* We dont care about collisions. Nodes with
* the same key stay together.
*/
if (entity_before(se, entry)) {
link = &parent->rb_left;
} else {
link = &parent->rb_right;
leftmost = false;
}
}
b_link_node(&se->run_node, parent, link);
rb_insert_color_cached(&se->run_node,
&cfs_rq->tasks_timeline, leftmost);
}3.4 负载计算
runnable_sum = running time + 等待时间;
runnable_period = 在系统中总时间;
runnable_avg_sum:可运行状态总的衰减时间;
runnable_avg_period = 在系统中总的衰减时间;
load_avg_contrib:进程平均负载贡献度;
load_avg_contrib = runnable_avg_sum * weight / runnable_avg_period;
runnable_load_avg:就绪队列上所有调度实体的load_avg_contrib总和;
一个调度实体负载总和:L = L0 + L1 * y1 + L2 * y2 + ...... + L32 * y32 + ......,yn = y*y*...*y(共n个);
static const u32 pelt32_runnable_avg_yN_inv[] __maybe_unused = {
0xffffffff, 0xfa83b2da, 0xf5257d14, 0xefe4b99a, 0xeac0c6e6, 0xe5b906e6,
0xe0ccdeeb, 0xdbfbb796, 0xd744fcc9, 0xd2a81d91, 0xce248c14, 0xc9b9bd85,
0xc5672a10, 0xc12c4cc9, 0xbd08a39e, 0xb8fbaf46, 0xb504f333, 0xb123f581,
0xad583ee9, 0xa9a15ab4, 0xa5fed6a9, 0xa2704302, 0x9ef5325f, 0x9b8d39b9,
0x9837f050, 0x94f4efa8, 0x91c3d373, 0x8ea4398a, 0x8b95c1e3, 0x88980e80,
0x85aac367, 0x82cd8698,
};计算第n个周期的衰减值:
static u64 decay_load(u64 val, u64 n)
{
unsigned int local_n;
if (unlikely(n > LOAD_AVG_PERIOD * 63))
return 0;
/* after bounds checking we can collapse to 32-bit */
local_n = n;
/*
* As y^PERIOD = 1/2, we can combine
* y^n = 1/2^(n/PERIOD) * y^(n%PERIOD)
* With a look-up table which covers y^n (n<PERIOD)
*
* To achieve constant time decay_load.
*/
if (unlikely(local_n >= LOAD_AVG_PERIOD)) {
val >>= local_n / LOAD_AVG_PERIOD;
local_n %= LOAD_AVG_PERIOD;
}
val = mul_u64_u32_shr(val, pelt_runnable_avg_yN_inv[local_n], 32);
return val;
}四、进程调度
4.1 选择被调度的task
struct task_struct *
pick_next_task_fair(struct rq *rq, struct task_struct *prev, struct rq_flags *rf)
{
struct cfs_rq *cfs_rq = &rq->cfs;
struct sched_entity *se;
struct task_struct *p;
int new_tasks;
again:
if (!sched_fair_runnable(rq))
goto idle;
#ifdef CONFIG_FAIR_GROUP_SCHED
if (!prev || prev->sched_class != &fair_sched_class)
goto simple;
/*
* Because of the set_next_buddy() in dequeue_task_fair() it is rather
* likely that a next task is from the same cgroup as the current.
*
* Therefore attempt to avoid putting and setting the entire cgroup
* hierarchy, only change the part that actually changes.
*/
do {
struct sched_entity *curr = cfs_rq->curr;
/*
* Since we got here without doing put_prev_entity() we also
* have to consider cfs_rq->curr. If it is still a runnable
* entity, update_curr() will update its vruntime, otherwise
* forget we've ever seen it.
*/
if (curr) {
if (curr->on_rq)
update_curr(cfs_rq);
else
curr = NULL;
/*
* This call to check_cfs_rq_runtime() will do the
* throttle and dequeue its entity in the parent(s).
* Therefore the nr_running test will indeed
* be correct.
*/
if (unlikely(check_cfs_rq_runtime(cfs_rq))) {
cfs_rq = &rq->cfs;
if (!cfs_rq->nr_running)
goto idle;
goto simple;
}
}
se = pick_next_entity(cfs_rq);
cfs_rq = group_cfs_rq(se);
} while (cfs_rq);
p = task_of(se);
/*
* Since we haven't yet done put_prev_entity and if the selected task
* is a different task than we started out with, try and touch the
* least amount of cfs_rqs.
*/
if (prev != p) {
struct sched_entity *pse = &prev->se;
while (!(cfs_rq = is_same_group(se, pse))) {
int se_depth = se->depth;
int pse_depth = pse->depth;
if (se_depth <= pse_depth) {
put_prev_entity(cfs_rq_of(pse), pse);
pse = parent_entity(pse);
}
if (se_depth >= pse_depth) {
set_next_entity(cfs_rq_of(se), se);
se = parent_entity(se);
}
}
put_prev_entity(cfs_rq, pse);
set_next_entity(cfs_rq, se);
}
goto done;
simple:
#endif
if (prev)
put_prev_task(rq, prev);
do {
se = pick_next_entity(cfs_rq);
set_next_entity(cfs_rq, se);
cfs_rq = group_cfs_rq(se);
} while (cfs_rq);
p = task_of(se);
done: __maybe_unused;
#ifdef CONFIG_SMP
/*
* Move the next running task to the front of
* the list, so our cfs_tasks list becomes MRU
* one.
*/
list_move(&p->se.group_node, &rq->cfs_tasks);
#endif
if (hrtick_enabled_fair(rq))
hrtick_start_fair(rq, p);
update_misfit_status(p, rq);
sched_fair_update_stop_tick(rq, p);
return p;
idle:
if (!rf)
return NULL;
new_tasks = newidle_balance(rq, rf);
/*
* Because newidle_balance() releases (and re-acquires) rq->lock, it is
* possible for any higher priority task to appear. In that case we
* must re-start the pick_next_entity() loop.
*/
if (new_tasks < 0)
return RETRY_TASK;
if (new_tasks > 0)
goto again;
/*
* rq is about to be idle, check if we need to update the
* lost_idle_time of clock_pelt
*/
update_idle_rq_clock_pelt(rq);
return NULL;
}4.2 进程上下文切换
prev:将要被换出的进程;
next:将要被执行的进程;
static __always_inline struct rq *
context_switch(struct rq *rq, struct task_struct *prev,
struct task_struct *next, struct rq_flags *rf)
{
prepare_task_switch(rq, prev, next);
/*
* For paravirt, this is coupled with an exit in switch_to to
* combine the page table reload and the switch backend into
* one hypercall.
*/
arch_start_context_switch(prev);
/*
* kernel -> kernel lazy + transfer active
* user -> kernel lazy + mmgrab_lazy_tlb() active
*
* kernel -> user switch + mmdrop_lazy_tlb() active
* user -> user switch
*
* switch_mm_cid() needs to be updated if the barriers provided
* by context_switch() are modified.
*/
if (!next->mm) { // to kernel
enter_lazy_tlb(prev->active_mm, next);
next->active_mm = prev->active_mm;
if (prev->mm) // from user
mmgrab_lazy_tlb(prev->active_mm);
else
prev->active_mm = NULL;
} else {
// 将新进程的页表基地址设置到页目录表基地址的寄存器 // to user
membarrier_switch_mm(rq, prev->active_mm, next->mm);
/*
* sys_membarrier() requires an smp_mb() between setting
* rq->curr / membarrier_switch_mm() and returning to userspace.
*
* The below provides this either through switch_mm(), or in
* case 'prev->active_mm == next->mm' through
* finish_task_switch()'s mmdrop().
*/
switch_mm_irqs_off(prev->active_mm, next->mm, next);
lru_gen_use_mm(next->mm);
if (!prev->mm) { // from kernel
/* will mmdrop_lazy_tlb() in finish_task_switch(). */
rq->prev_mm = prev->active_mm;
prev->active_mm = NULL;
}
}
/* switch_mm_cid() requires the memory barriers above. */
switch_mm_cid(rq, prev, next);
prepare_lock_switch(rq, next, rf);
/* Here we just switch the register state and the stack. */
// 新旧进程的堆栈切换
switch_to(prev, next, prev);
barrier();
return finish_task_switch(prev);
}设置页表基地址到寄存器,并设置context ID:
// kernel/arch/arm/mm/proc-v7-2level.S
ENTRY(cpu_v7_switch_mm)
#ifdef CONFIG_MMU
mmid r1, r1 @ get mm->context.id
ALT_SMP(orr r0, r0, #TTB_FLAGS_SMP)
ALT_UP(orr r0, r0, #TTB_FLAGS_UP)
#ifdef CONFIG_PID_IN_CONTEXTIDR
mrc p15, 0, r2, c13, c0, 1 @ read current context ID
lsr r2, r2, #8 @ extract the PID
bfi r1, r2, #8, #24 @ insert into new context ID
#endif
#ifdef CONFIG_ARM_ERRATA_754322
dsb
#endif
mcr p15, 0, r1, c13, c0, 1 @ set context ID
isb
mcr p15, 0, r0, c2, c0, 0 @ set TTB 0
isb
#endif
bx lr
ENDPROC(cpu_v7_switch_mm)切换新旧进程的栈空间:
r0:旧进程的task_struct
r1:旧进程的thread_info结构体
r2:新进程的thread_info结构体
将旧进程的寄存器上下文信息保存到thread_info->cpu_context,将新进程的thread_info->cpu_context设置到cpu的寄存器中,实现进程的堆栈切换。
// kernel/arch/arm/kernel/entry-armv.S
ENTRY(__switch_to)
UNWIND(.fnstart )
UNWIND(.cantunwind )
add ip, r1, #TI_CPU_SAVE
ARM( stmia ip!, {r4 - sl, fp, sp, lr} ) @ Store most regs on stack
THUMB( stmia ip!, {r4 - sl, fp} ) @ Store most regs on stack
THUMB( str sp, [ip], #4 )
THUMB( str lr, [ip], #4 )
ldr r4, [r2, #TI_TP_VALUE]
ldr r5, [r2, #TI_TP_VALUE + 4]
#ifdef CONFIG_CPU_USE_DOMAINS
mrc p15, 0, r6, c3, c0, 0 @ Get domain register
str r6, [r1, #TI_CPU_DOMAIN] @ Save old domain register
ldr r6, [r2, #TI_CPU_DOMAIN]
#endif
switch_tls r1, r4, r5, r3, r7
#if defined(CONFIG_STACKPROTECTOR) && !defined(CONFIG_SMP)
ldr r7, [r2, #TI_TASK]
ldr r8, =__stack_chk_guard
.if (TSK_STACK_CANARY > IMM12_MASK)
add r7, r7, #TSK_STACK_CANARY & ~IMM12_MASK
.endif
ldr r7, [r7, #TSK_STACK_CANARY & IMM12_MASK]
#endif
#ifdef CONFIG_CPU_USE_DOMAINS
mcr p15, 0, r6, c3, c0, 0 @ Set domain register
#endif
mov r5, r0
add r4, r2, #TI_CPU_SAVE
ldr r0, =thread_notify_head
mov r1, #THREAD_NOTIFY_SWITCH
bl atomic_notifier_call_chain
#if defined(CONFIG_STACKPROTECTOR) && !defined(CONFIG_SMP)
str r7, [r8]
#endif
THUMB( mov ip, r4 )
mov r0, r5
ARM( ldmia r4, {r4 - sl, fp, sp, pc} ) @ Load all regs saved previously
THUMB( ldmia ip!, {r4 - sl, fp} ) @ Load all regs saved previously
THUMB( ldr sp, [ip], #4 )
THUMB( ldr pc, [ip] )
UNWIND(.fnend )
ENDPROC(__switch_to)五、调度tick
CFS调度器的tick是一个固定的时间间隔,通常为1毫秒。每当tick发生时,调度器会检查当前正在运行的进程是否已经运行了足够的时间,并且是否需要进行调度。
tick的作用有两个主要方面:
1)周期性的任务切换:CFS调度器会周期性地检查运行的进程,并确保每个进程在公平共享CPU时间片。通过将运行时间切割为较小的时间片,调度器可以尽量保证各个进程以相等的机会获得CPU资源。
2)决策调度点:tick也是CFS调度器进行重要决策的时间点。在每个tick中,调度器会评估进程的优先级和运行时间,并根据这些信息做出决策,比如选择下一个需要运行的进程。
void scheduler_tick(void)
{
int cpu = smp_processor_id();
struct rq *rq = cpu_rq(cpu);
struct task_struct *curr = rq->curr;
struct rq_flags rf;
unsigned long thermal_pressure;
arch_scale_freq_tick();
sched_clock_tick();
rq_lock(rq, &rf);
trace_android_rvh_tick_entry(rq);
// 更新cpu就绪队列中的时钟计数
update_rq_clock(rq);
thermal_pressure = arch_scale_thermal_pressure(cpu_of(rq));
update_thermal_load_avg(rq_clock_thermal(rq), rq, thermal_pressure);
curr->sched_class->task_tick(rq, curr, 0);
calc_global_load_tick(rq);
psi_task_tick(rq);
rq_unlock(rq, &rf);
perf_event_task_tick();
#ifdef CONFIG_SMP
rq->idle_balance = idle_cpu(cpu);
trigger_load_balance(rq);
#endif
trace_android_vh_scheduler_tick(rq);
}static void task_tick_fair(struct rq *rq, struct task_struct *curr, int queued)
{
struct cfs_rq *cfs_rq;
struct sched_entity *se = &curr->se;
for_each_sched_entity(se) {
cfs_rq = cfs_rq_of(se);
entity_tick(cfs_rq, se, queued);
}
if (static_branch_unlikely(&sched_numa_balancing))
task_tick_numa(rq, curr);
update_misfit_status(curr, rq);
update_overutilized_status(task_rq(curr));
}六、组调度
组调度结构体:
struct task_group {
struct cgroup_subsys_state css;
#ifdef CONFIG_FAIR_GROUP_SCHED
/* schedulable entities of this group on each CPU */
struct sched_entity **se;
/* runqueue "owned" by this group on each CPU */
struct cfs_rq **cfs_rq;
unsigned long shares;
......
}创建一个组调度:
struct task_group *sched_create_group(struct task_group *parent)
{
struct task_group *tg;
tg = kmem_cache_alloc(task_group_cache, GFP_KERNEL | __GFP_ZERO);
if (!tg)
return ERR_PTR(-ENOMEM);
if (!alloc_fair_sched_group(tg, parent))
goto err;
if (!alloc_rt_sched_group(tg, parent))
goto err;
alloc_uclamp_sched_group(tg, parent);
return tg;
err:
sched_free_group(tg);
return ERR_PTR(-ENOMEM);
}int alloc_fair_sched_group(struct task_group *tg, struct task_group *parent)
{
struct sched_entity *se;
struct cfs_rq *cfs_rq;
int i;
tg->cfs_rq = kcalloc(nr_cpu_ids, sizeof(cfs_rq), GFP_KERNEL);
if (!tg->cfs_rq)
goto err;
tg->se = kcalloc(nr_cpu_ids, sizeof(se), GFP_KERNEL);
if (!tg->se)
goto err;
tg->shares = NICE_0_LOAD;
init_cfs_bandwidth(tg_cfs_bandwidth(tg));
for_each_possible_cpu(i) {
cfs_rq = kzalloc_node(sizeof(struct cfs_rq),
GFP_KERNEL, cpu_to_node(i));
if (!cfs_rq)
goto err;
se = kzalloc_node(sizeof(struct sched_entity),
GFP_KERNEL, cpu_to_node(i));
if (!se)
goto err_free_rq;
init_cfs_rq(cfs_rq);
init_tg_cfs_entry(tg, cfs_rq, se, i, parent->se[i]);
init_entity_runnable_average(se);
}
return 1;
err_free_rq:
kfree(cfs_rq);
err:
return 0;
}
void init_tg_cfs_entry(struct task_group *tg, struct cfs_rq *cfs_rq,
struct sched_entity *se, int cpu,
struct sched_entity *parent)
{
struct rq *rq = cpu_rq(cpu);
cfs_rq->tg = tg;
cfs_rq->rq = rq;
init_cfs_rq_runtime(cfs_rq);
tg->cfs_rq[cpu] = cfs_rq;
tg->se[cpu] = se;
/* se could be NULL for root_task_group */
if (!se)
return;
if (!parent) {
se->cfs_rq = &rq->cfs;
se->depth = 0;
} else {
se->cfs_rq = parent->my_q;
se->depth = parent->depth + 1;
}
se->my_q = cfs_rq;
/* guarantee group entities always have weight */
update_load_set(&se->load, NICE_0_LOAD);
se->parent = parent;
}进程加入到组调度:
static void cpu_cgroup_attach(struct cgroup_taskset *tset)
{
struct task_struct *task;
struct cgroup_subsys_state *css;
cgroup_taskset_for_each(task, css, tset)
// 将进程加入到组调度中
sched_move_task(task);
trace_android_rvh_cpu_cgroup_attach(tset);
}
void sched_move_task(struct task_struct *tsk)
{
int queued, running, queue_flags =
DEQUEUE_SAVE | DEQUEUE_MOVE | DEQUEUE_NOCLOCK;
struct rq_flags rf;
struct rq *rq;
rq = task_rq_lock(tsk, &rf);
update_rq_clock(rq);
running = task_current(rq, tsk);
queued = task_on_rq_queued(tsk);
if (queued)
dequeue_task(rq, tsk, queue_flags);
if (running)
put_prev_task(rq, tsk);
sched_change_group(tsk, TASK_MOVE_GROUP);
if (queued)
enqueue_task(rq, tsk, queue_flags);
if (running) {
set_next_task(rq, tsk);
/*
* After changing group, the running task may have joined a
* throttled one but it's still the running task. Trigger a
* resched to make sure that task can still run.
*/
resched_curr(rq);
}
task_rq_unlock(rq, tsk, &rf);
}组调度实现原理总结:
1)创建组调度tg后,需要为每个cpu创建创建组调度内部的就绪队列
2)组调度以一个调度实体加入cpu的就绪队列
3)某个进程加入组调度的就绪队列后,需要从cpu的就绪队列中移除
4)选择被调度的实体是一个组调度时,需要再遍历组调度中的调度实体
七、调度类&调度实体&就绪队列
在Linux中,将调度器公共的部分抽象,使用struct sched_class结构体描述一个具体的调度类。系统核心调度代码会通过struct sched_class结构体的成员调用具体调度类的核心算法。
struct sched_class {
const struct sched_class *next; //指向下一个调度类,按照优先级
void (*enqueue_task) (struct rq *rq, struct task_struct *p, int flags); //向该调度类的runqueue(就绪队列)中添加进程
void (*dequeue_task) (struct rq *rq, struct task_struct *p, int flags); //向该调度类的runqueue(就绪队列)中删除进程
void (*check_preempt_curr)(struct rq *rq, struct task_struct *p, int flags); //当一个进程被唤醒或者创建的时候,需要检查当前进程是否可以抢占当前cpu上正在运行的进程,如果可以抢占需要标记TIF_NEED_RESCHED flag
//从runqueue中选择一个最适合运行的task
struct task_struct * (*pick_next_task)(struct rq *rq, struct task_struct *prev,
struct rq_flags *rf);
......
}
static inline struct task_struct *pick_next_task(struct rq *rq,
struct task_struct *prev, struct rq_flags *rf)
{
const struct sched_class *class;
struct task_struct *p;
/* 按照优先级顺序便利所有的调度类,通过next指针便利单链表 */
for_each_class(class) {
p = class->pick_next_task(rq, prev, rf);
if (p)
return p;
}
}调度类 |
描述 |
调度策略 |
dl_sched_class |
deadline调度器 |
SCHED_DEADLINE |
rt_sched_class |
实时调度器 |
SCHED_FIFO、SCHED_RR |
fair_sched_class |
完全公平调度器 |
SCHED_NORMAL、SCHED_BATCH |
idle_sched_class |
Idle task调度器 |
SCHED_IDLE |
调度实体:
struct sched_entity {
struct load_weight load;
struct rb_node run_node;
unsigned int on_rq;
u64 sum_exec_runtime;
u64 vruntime;
}; 就绪队列:
struct rq {
struct cfs_rq cfs;
struct rt_rq rt;
struct dl_rq dl;
};
struct rb_root_cached {
struct rb_root rb_root; //红黑树的根节点
struct rb_node *rb_leftmost; //红黑树的最左边节点
};
struct cfs_rq {
struct load_weight load; //就绪队列管理的所有调度实体权重之和
unsigned int nr_running; //调度实体的个数
u64 min_vruntime; //就绪队列上的最小虚拟时间
struct rb_root_cached tasks_timeline; //就绪队列红黑树的信息
};八、调度延迟
调度延迟是保证每一个可运行进程都至少运行一次的时间间隔,也称作调度周期。
例如,每个进程都运行10ms,系统中总共有2个进程,那么调度延迟就是20ms。如果有5个进程,那么调度延迟就是50ms。如果现在保证调度延迟不变,固定是6ms,那么系统中如果有2个进程,那么每个进程运行3ms。如果有6个进程,那么每个进程运行1ms。如果有100个进程,那么每个进程分配到的时间就是0.06ms。随着进程的增加,每个进程分配的时间在减少,进程调度过于频繁,上下文切换时间开销就会变大。因此,CFS调度器的调度延迟时间的设定并不是固定的。当系统处于就绪态的进程少于一个定值(默认值8)的时候,调度延迟也是固定一个值不变(默认值6ms)。当系统就绪态进程个数超过这个值时,我们保证每个进程至少运行一定的时间才让出cpu。这个“至少一定的时间”被称为最小粒度时间。在CFS默认设置中,最小粒度时间是0.75ms。用变量sysctl_sched_min_granularity记录。因此,调度周期是一个动态变化的值。调度周期计算函数是__sched_period()
static u64 __sched_period(unsigned long nr_running)
{
// sched_nr_latency为系统处于就绪态的进程数量(默认值8)
if (unlikely(nr_running > sched_nr_latency))
return nr_running * sysctl_sched_min_granularity;
else
return sysctl_sched_latency;
}