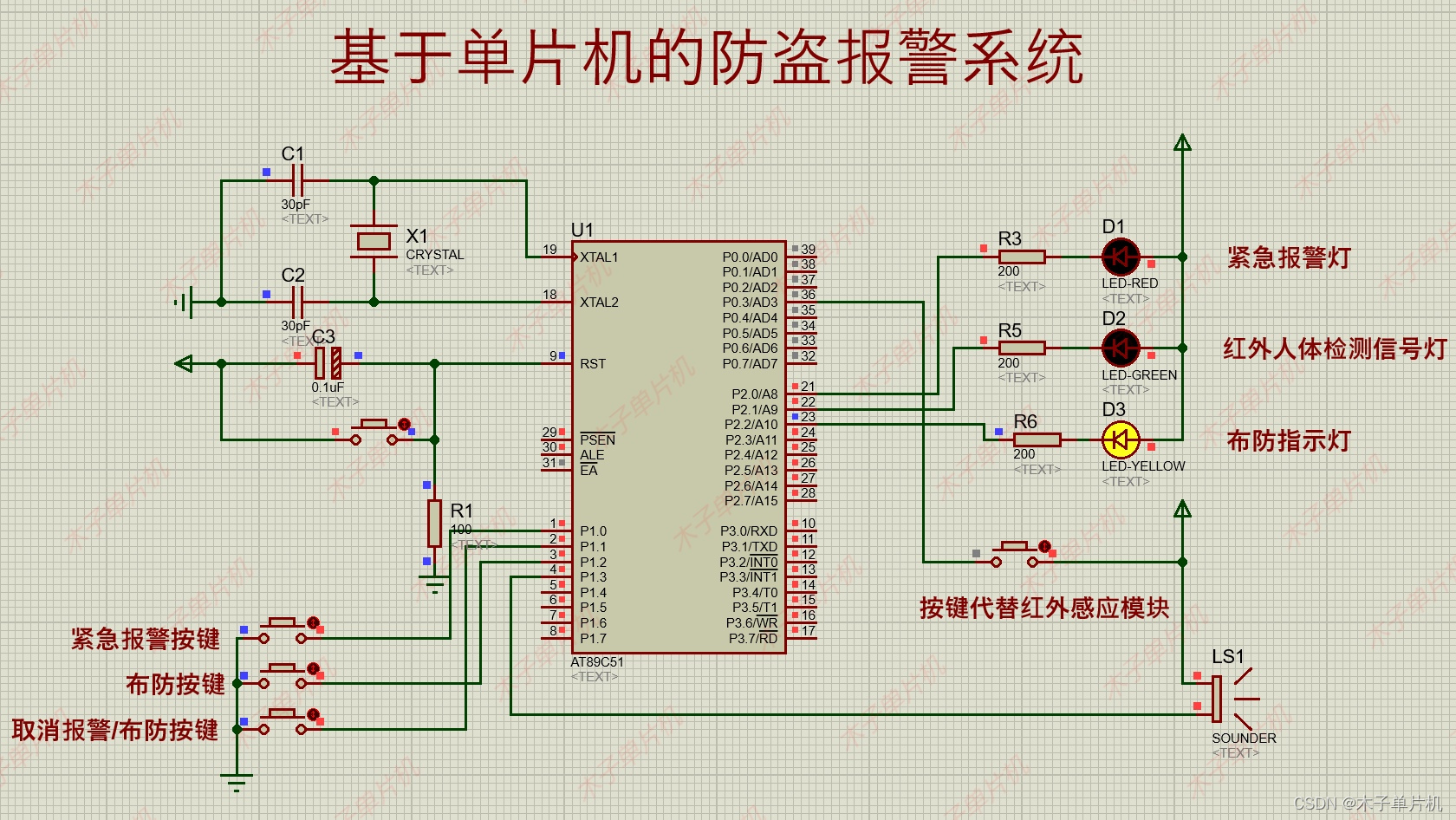
51单片机——电动车报警器
1.震动控制灯
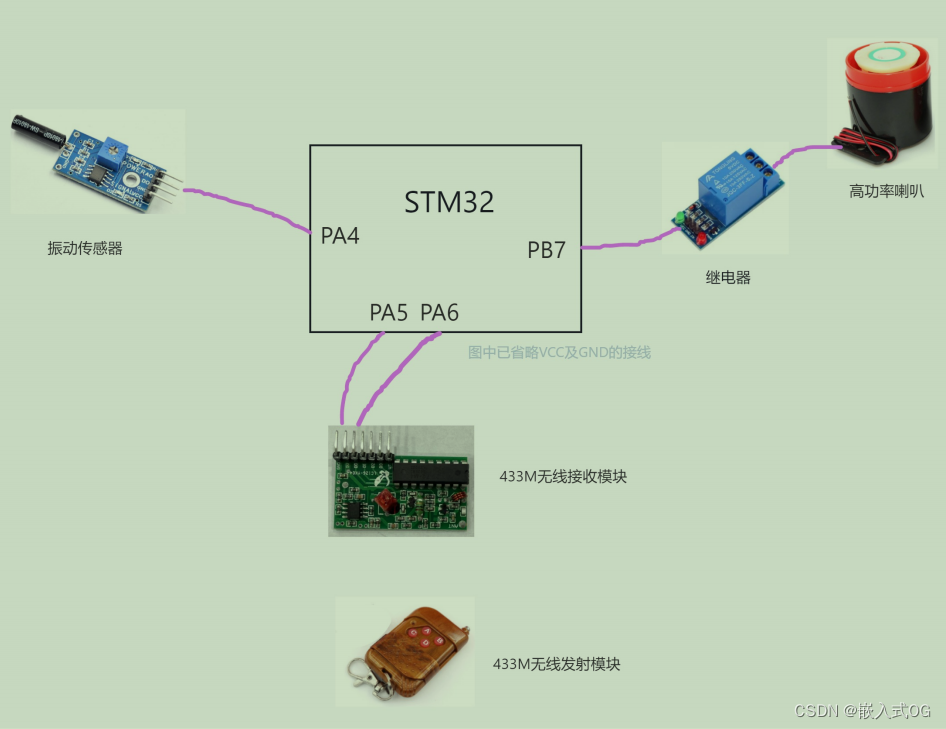
硬件:震动传感器,51单片机
#include "reg52.h"
sbit led1 = P3^7;//根据原理图(电路图),设备变量led1指向P3组IO口的第7口
sbit vibrate = P3^3;//Do接到了P3.3口
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
// _nop_();
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
//查询方式判断是否发生震动
while(1){
if(vibrate == 0)//模块说明告诉我们,震动的话,D0输出低电平
{
led1 = 0;//亮灯
Delay2000ms();
led1 = 1;
}else{
led1 = 1;//灭灯
}
}
}
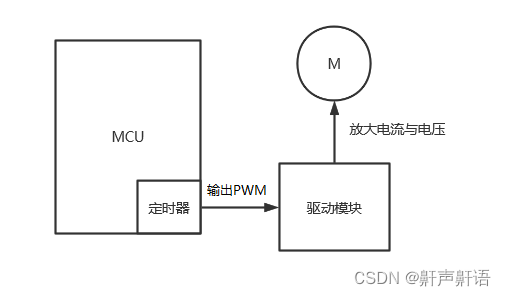
2.震动控制继电器
#include "reg52.h"
sbit vibrate = P3^3;//Do接到了P3.3口
sbit switcher = P1^1;
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
// _nop_();
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
//查询方式判断是否发生震动
while(1){
if(vibrate == 0)//模块说明告诉我们,震动的话,D0输出低电平
{
//当发生震动适合,导通继电器,给继电器IN一个低电平
switcher = 0;
Delay2000ms();
switcher = 1;//高电平,继电器N0和COM不通
}else{
switcher = 1;
}
}
}
3.遥控接收433M控制继电器
#include "reg52.h"
sbit D0_ON = P1^2;
sbit D1_OFF = P1^3;
sbit switcher = P1^1;
void main()
{
//查询方式哪个按键被按下
while(1)
{
if(D0_ON == 1)//收到遥控信号A,D0表现为高电平
{
//A被按下,我们导通继电器,给继电器IN一个低电平
switcher = 0;
}
if(D1_OFF == 1)//收到遥控信号C,D1表现为高电平
{
//B被按下,我们不导通继电器,给继电器IN一个高电平
switcher = 1;
}
}
}
电动车报警器开发
#include "reg52.h"
#include<intrins.h>
#define J_ON 1
#define J_OFF 0
sbit switcher = P1^0;
sbit D0_ON = P1^1;
sbit D1_OFF = P1^2;
sbit vibrate = P1^3;
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay500ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 4;
j = 129;
k = 119;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
int mark = J_OFF;
while(1)
{
//1. 如果a按键被按下,设定为开启警报模式
if(D0_ON == 1){
//长响,表示进入警报模式
switcher = 0;
Delay2000ms();
switcher = 1;
//设定警报模式标记
mark = J_ON ;
}
//2. 如果b按键被按按下,设定为关闭警报模式
if(D1_OFF == 1){
//短响,表示进入解除警报模式
switcher = 0;
Delay500ms();
switcher = 1;
//设定警报解除模式标记
mark = J_OFF ;
}
//3. 如果标记是在警报模式下
if(mark == J_ON){
//3.1 如果发生了震动
if(vibrate == 0){
//喇叭响,给继电器低电平,导通
switcher = 0;
}//3.2 如果不发生震动
else{
//喇叭不响,给继电器高电平,不导通
switcher = 1;
}
}
}
}


































![[C#][opencvsharp]opencvsharp sift和surf特征点匹配](https://img-blog.csdnimg.cn/direct/d57423c553df4e3baa0ee54913ed662a.png)